

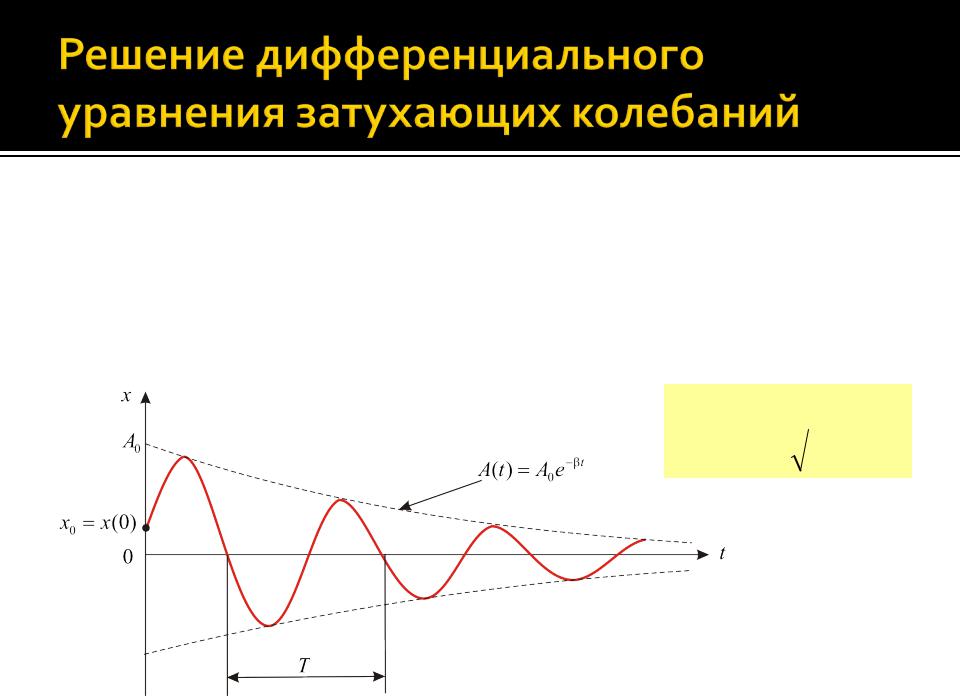
Несмотря на то, что функция
x A0e t cos( t 0 )
не является периодической, вводится понятие периода затухающих колебаний:
T |
2 |
|
|
2 |
|
|
|
|
|
||
02 2 |
|
||||
|
|
|
|

Скорость тела при затухающих колебаниях равна
|
d |
[A0e |
t |
cos( t |
0 )] A0e |
t |
[ cos( t 0 ) sin( t 0 )] |
|||||||||||||||||||||
vx x |
|
|
|
|
|
|||||||||||||||||||||||
dt |
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
A e t |
|
2 |
2 |
|
|
|
|
|
cos( t |
|
0 |
) |
|
|
|
|
sin( t |
0 |
) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
|
|
|
2 |
|
2 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
A0e t 0 [cos cos( t 0 ) sin sin( t 0 )] A0e t 0 cos( t 0 )
Здесь введен вспомогательный угол , для которого
cos |
|
|
|
0; |
sin |
|
|
|
0; |
tg |
|
|
|
|
|
|
|
|
|||||
2 2 |
2 2 |

Коэффициент затухания
2rm
Здесь r – коэффициент сопротивления среды, m – масса тела. Коэффициент затухания определяет, насколько быстро уменьшается амплитуда колебаний с течением времени.
Коэффициент затухания численно равен обратному времени, за которое амплитуда колебаний уменьшается в e раз.

Время жизни колебаний - это промежуток времени, в течение которого амплитуда колебаний уменьшается в e раз:
A(t) |
|
A e t |
|
|
|
0 |
e e |
A(t ) |
A e (t ) |
||
|
|
0 |
|
1

Логарифмический декремент затухания ( ) – натуральный
логарифм отношения амплитуд затухающего колебания в моменты времени, разделенные промежутком в один период T:
ln |
A(t) |
ln |
A0e t |
ln e T T T |
T T |
|
A(t T ) |
A0e (t T ) |
|||||
|
|
|
|

Добротность Q – умноженное на число количество
колебаний за время, в течение которого амплитуда уменьшается в e раз:
Q Ne
T T
При слабом затухании ( << 0) добротность Q равна (с точностью до коэффициента 2 ) отношению энергии E колебаний к величине потерь энергии за один период | E|:
Q 2 E
E

Поскольку энергия системы прямо пропорциональна квадрату амплитуды A колебаний, то
EA2 (t) E0 e 2 t
Продифференцируем по времени выражение для энергии E и учтем малость затухания, т.е. dE/dt E/ T:
dE |
|
E |
2 e 2 t 2 E |
|
E |
|
|
1 |
|
Ne |
|
Q |
dt |
T |
|
E |
|
2 T |
|
|
|||||
|
|
|
|
|
|
2 2 |
||||||
Тогда |
|
|
Примечание. Добротность колебательной системы |
|||
|
|
|
|
|
|
|
Q 2 |
|
|
E |
|
|
дает грубую оценку числа периодов, в течение |
|
|
|
|
которых практически вся механическая энергия |
||
|
|
E |
|
|
||
|
|
|||||
|
|
|
|
|
превращается в теплоту. |
|

При увеличении коэффициента сопротивления среды r и, соответственно, коэффициента затухания период затухающих колебаний возрастает:
T |
|
2 |
|
|
|
|
|
02 2 |
|
||
|
|
|
При 0 T , т.е. при достаточно большом коэффициента затухания колебания в системе невозможны. При этом выведенная из положения система возвращается в это положение, не совершая колебаний. Такое движение, при котором отсутствует признак колебаний – повторяемость, – называется апериодическим движением.

x 2 x 02 x 0
Если коэффициент затухания > 0, то решение дифференциального уравнения затухающих колебаний имеет вид:
x C1e 1t C2e 2t ; 1,2 
 2 02
2 02
Здесь C1,2 – постоянные коэффициенты, зависящие от начальных условий движения. Поскольку параметры 1,2 < 0, а функция x представляет собой сумму убывающих экспонент, величина x – отклонение системы от положения равновесия – быстро приближается к нулевому значению
x C e 1t C |
e 2t ; |
|
|
|
|
|
|
1,2 |
2 2 |
||||
1 |
2 |
|
|
0 |
||

x 2 x 02 x 0
Если выполнено условие = 0, то решение дифференциального уравнения затухающих колебаний имеет вид:
x C1e t C2te t
Здесь C1,2 – постоянные коэффициенты, зависящие от начальных условий движения. При выполнении условия = 0 поведение механической системы называется критическим режимом, а параметр – критическим коэффициентом затухания.