

Билет №5
Задание 1. Сформулировать определение термина «инертность».
Задание 2. Сформулировать определение термина «плоская система сил».
Задание 3. Сформулировать определение термина «проекция силы на ось».
Задание 4. Используя правило треугольника, записать формулу, связывающую модули двух сходящихся сил и их равнодействующую.
Задание 5. Записать формулу для определения главного вектора сил.
Задание 6. Сформулировать определение термина «ускорение».
Задание 7. Записать формулу равномерного прямолинейного движения точки в декартовой системе отсчёта.
Задание 8. Где прикладывают и как направляют вектор углового ускорения тела при ускоренном вращении тела?
Задание 9. Записать формулу для определения ускорения точки при задании её движения векторным способом.
З
Рис.
5.1
На
механическую систему, состоящую из
двух тел, действуют активные нагрузки
Р1,
Р2,
q,
М.
К
механической системе приложить реакции
внешних связей и записать правую часть
уравнения равновесия

![]() ?
?
Рис.
5.2
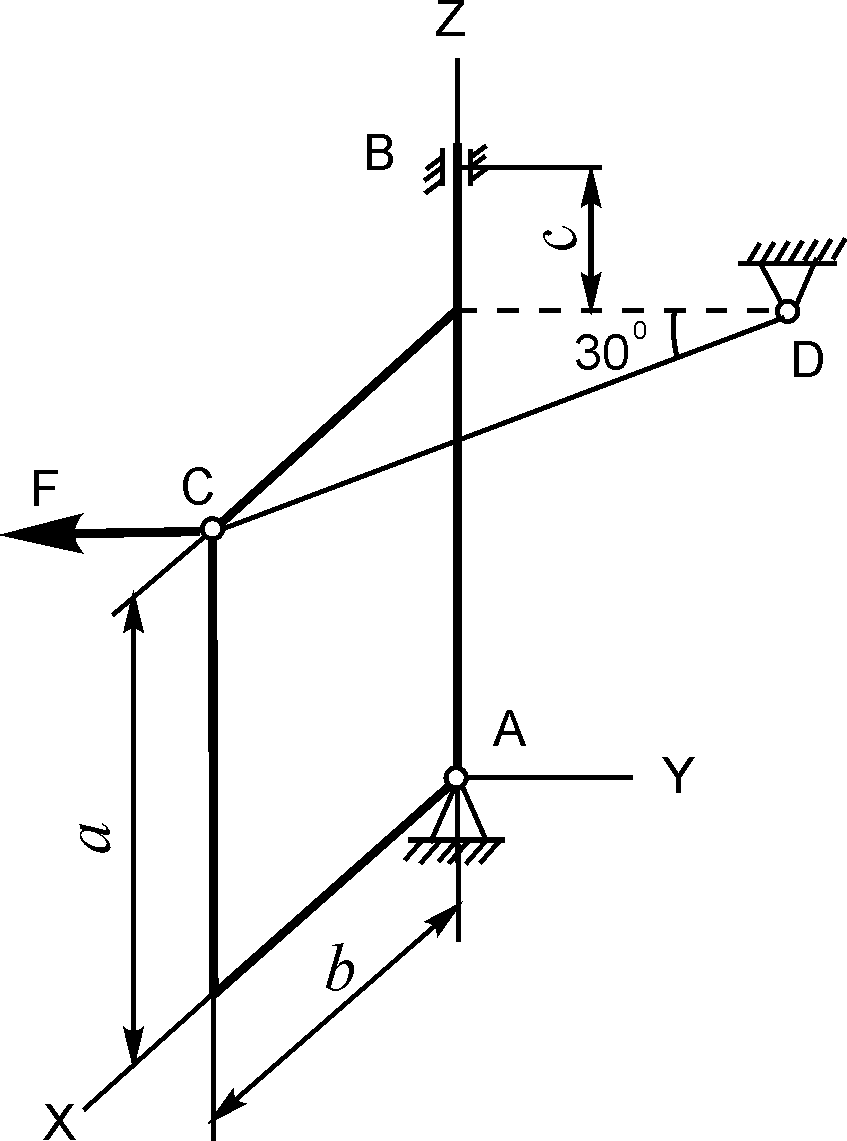
На
однородную горизонтальную пластину
действуют сила тяжести G
и активная сила F.
К
механической системе приложить реакции
внешних связей и записать правую часть
уравнения равновесия
Рис.
5.3
Движущаяся
механическая система состоит из шести
тел. Геометрические параметры тел
известны. R2,
r2,
R3
– соответственно радиусы тел 2 и 3. Центр
масс тела 1 имеет скорость V.
Определить
угловую скорость

![]() ?
?
![]() тела 3 в зависимости от величины скоростиV
и геометрических параметров механизма
тела 3 в зависимости от величины скоростиV
и геометрических параметров механизма![]() =
f(V,
r2,
R2,
R3)
= …?
=
f(V,
r2,
R2,
R3)
= …?
Рис.
5.4
На
рисунке изображён плоский механизм,
состоящий из трёх звеньев. Известны
геометрические параметры звеньев этого
механизма. Ведущие звенья 1, 2 совершают
вращательные движения с угловыми
скоростями
Показать
на рисунке направления скоростей точек
A,
В, С.
![]() ,
,![]() .
.
Рис.
5.5
Тележка
А совершает поступательное горизонтальное
движение по закону Y1
= 4·t3
+ 2·t2
+ t
+ 1. В наклонном канале тележки перемещается
шарик по закону ОМ = X
= f(t)
= ·t3
+ 2·t.
Показать
на рисунке переносное ускорение шарика.
Билет №6
Задание 1. Сформулировать определение термина «материальная точка».
Задание 2. Сформулировать определение термина «сходящаяся система сил».
Задание 3. Записать уравнения равновесия для плоской системы сходящихся сил в декартовой системе отсчёта OXYZ.
Задание 4. Записать формулу, выражающую аксиому равновесия двух сил.
Задание 5. Записать формулу для определения модуля главного вектора сил в декартовой системе отсчёта.
Задание 6. Куда направлено ускорение точки по отношению к траектории её движения?
Задание 7. Записать уравнение движения точки в естественных координатах.
Задание 8. Сформулировать определение термина «основная система отсчёта».
Задание 9. Записать уравнение равнопеременного движения точки в естественных координатах.
З
Рис.
6.1
На
механическую систему, состоящую из
двух тел, действуют активные нагрузки
Р1,
Р2,
q,
М.
К
механической системе приложить реакции
внешних связей и записать правую часть
уравнения равновесия

![]() ?
?
Рис.
6.2
На
однородную вертикальную пластину
действуют сила тяжести G
и активная сила F.
К
механической системе приложить реакции
внешних связей и записать правую часть
уравнения равновесия
Рис.
6.3
Движущаяся
механическая система состоит из пяти
тел. Геометрические параметры тел
известны. R5
– радиус тела 5. Центр масс тела 1 имеет
скорость V.
Определить
модуль скорости точки В тела 5 в
зависимости от величины скорости V
и геометрических параметров механизма
VB
=
f(V, R5)
= …?
![]() ?
?
Рис.
6.4
На
рисунке изображён плоский механизм,
состоящий из трёх звеньев. Известны
геометрические параметры звеньев этого
механизма. l1,
l2
– соответственно длины звеньев 1 и 2.
Ведущее звено 1 совершает вращательное
движение с угловой скоростью
Показать
на рисунке направления скоростей точек
A,
В, С.
Рис.
6.5
Плоский
механизм состоит из трёх тел. Тела 1, 2
имеют одинаковые размеры (O1A
= O2B
= r1
= r2
= r
= 1 м) и совершают вращательные движения
с постоянными угловыми скоростями
В
заданном положении механизма показать
на рисунке переносное ускорение точки
М.
![]() .
АС = ВС.
.
АС = ВС.
![]() ,
,![]() модули которых равны: ω1
= ω2
= 1 рад/с. По каналу, выполненному в теле
3 (тело А), перемещается точка М по закону
OM
= X
= f(t)
= 4·t3
+ 2·t2
+7t.
модули которых равны: ω1
= ω2
= 1 рад/с. По каналу, выполненному в теле
3 (тело А), перемещается точка М по закону
OM
= X
= f(t)
= 4·t3
+ 2·t2
+7t.