

ГОСы / Трактора и Автомобили / 19
.doc19.Рулевое управление предназначено для устойчивого сохранения заданного направления движения и для желаемого изменения его.
Рулевую трапецию и продольную рулевую тягу, обеспечивающие поворот управляемых колес, называют рулевым приводом.
Водитель воздействует на рулевой привод через замедляющую передачу, которая увеличивает приложенное к рулевому колесу усилие водителя. Ее называют рулевым механизмом. К сошке рулевого механизма крепят второй конец продольной рулевой тяги.
Совокупность рулевого колеса с его валом, рулевого механизма и рулевого привода составляет рулевое управление машины.
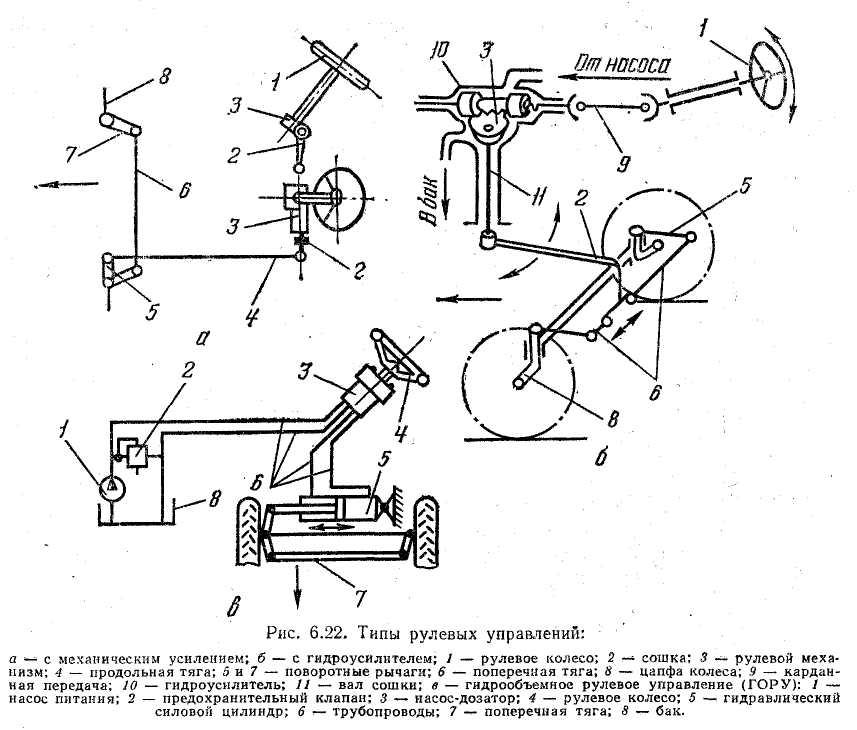
В рулевых управлениях с механическим усилением в механизме 3 используют обычно механическую, червячную или зубчатую передачу.
В рулевых управлениях с гидроусилителем применяют как механическую (зубчатую, винтовую) передачу, так и гидравлический усилитель. Гидроусилители могут быть встроены совместно с механической передачей в общий рулевой механизм или монтироваться отдельно от рулевого механизма — в рулевом приводе.
Гидрообъемное рулевое управление не имеет механического усилителя и для поворота использует энергию жидкости. Пропорциональность поворота управляемых колес и рулевого колеса 4 обеспечивается специальным насосом-дозатором 3.
По месту расположения рулевой трапеции относительно управляемого моста различают рулевые приводы с передним и задним расположением трапеции. Переднее расположение трапеции — на тракторах ЮМЗ, автомобилях ГАЗ-66 и УАЗ-352; заднее — на автомобилях ГАЗ-53А, ЗИЛ-130, КамАЗ-5320; тракторах МТЗ-80, МТЗ-82, Т-40М, Т-40АМ и др.
В рулевых трапециях могут применяться одна поперечная тяга 6 (рис. 6.22, а) или две (рис. 6.22, б), соединенных с сошкой 2 рулевого механизма. Трапеции с двумя поперечными рулевыми тягами применяют на универсально-пропашных тракторах МТЗ-80 и Т-40М, где это упрощает регулировку колеи передних колес, а также на легковых автомобилях с независимой подвеской управляемых кол
Работа гусеничного движителя
Теоретическая поступательная скорость vT гусеничного трактора, определяемая при условии равномерного вращения ведущих колес и отсутствия буксования или скольжения гусениц, может быть выражена в той же форме, какая была принята выше для колесного трактора, т. е.
![]()
где ωк — угловая скорость;
rк — теоретический радиус ведущих колес гусеничного движителя.
Двигаясь без буксования, трактор проходит за один, оборот ведущих колес путь, равный периметру описанного многоугольника, образуемого звеньями гусениц, укладывающимися на окружности колеса. Таким образом, для гусеничного трактора может быть написано следующее соотношение:
![]()
где lзв — шаг гусеничного звена;
zк — число активно действующих зубьев ведущих колес.
Число zк равно общему числу зубьев ведущих колес, если каждый зуб последовательно входит в зацепление с очередным звеном гусеницы. Если зацепление производится через зуб, как это иногда делают, то число активно действующих зубьев равно половине общего числа зубьев колес.
Из предыдущего уравнения имеем:
 (31)
(31)
Шаг звена гусеницы по мере износа проушин и пальцев несколько увеличивается, Это соответственно меняет и величину радиуса rк. Чтобы устранить возможные ошибки, теоретический радиус ведущих колес гусеничного движителя следует определять по фактическому среднему шагу всех звеньев, образующих гусеничную цепь. Он находится путем измерения длины гусеничных цепей, раскладываемых на ровной поверхности и растягиваемых под нагрузкой. Радиус rк может быть также определен экспериментальным путем но уравнению:
 (31а)
(31а)
где nхол — число оборотов ведущих колес, замеренное при прохождении трактором вхолостую мерного гона длиной S на участке с высокими сцепными качествами.
Для гусеничного движителя такой метод определения радиуса гк достаточно точен.
Если известна частота вращения nк ведущих колес гусеничных движителей в 1 мин, то теоретическая поступательная скорость трактора определяется по следующей формуле:
 (32)
(32)
(В этой формуле lзв в м; VT в км/ч.)
Скорость, подсчитанная по приведенным формулам, является средней. Вследствие того что гусеничная цепь представляет собой не гибкую ленту, а состоит из отдельных жестких звеньев, действительная поступательная скорость трактора не имеет постоянного значения; даже при равномерном вращении ведущих колес она меняется в некоторых пределах с определенной периодической повторяемостью при каждом переходе заднего опорного катка на следующее звено гусеницы. Таким образом, период, в течение которого происходит полный цикл изменения скорости, соответствует повороту ведущего колеса
гусеницы на угол
![]()
Интенсивность периодических колебаний скорости трактора возрастает с повышением скорости движения, увеличением шага звеньев, а также в зависимости от некоторых других конструктивных параметров гусеничного движителя. Возникающие вследствие колебаний скорости силы инерции и удары создают дополнительные нагрузки на детали движителя.
У тракторов сельскохозяйственного типа влияние периодических колебаний скорости движения невелико. У быстроходных гусеничных тягачей, где оно могло бы быть более значительным, интенсивность периодических колебаний скорости движения снижается путем применения гусениц с малым шагом звена. В дальнейшем изложении под поступательной скоростью движения гусеничного трактора будем понимать осредненную скорость, без учета отмеченной неравномерности хода.
П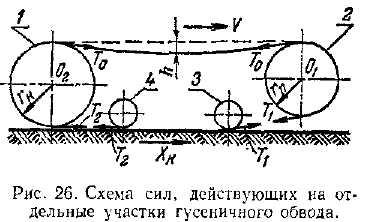 ерейдем
теперь к анализу сил, нагружающих
различные участки гусеничных цепей.
Возьмем простейший случай равномерного
движения трактора передним ходом на
горизонтальном участке по твердой
дороге. Представим гусеницы в виде
замкнутого обвода, огибающего четыре
детали (рис. 26): ведущее колесо /, натяжное
(направляющее) колесо 2,
передний и
задний опорные катки 3
и 4.
При принятом
заднем расположении ведущих колес
на гусеничном обводе можно выделить
четыре ветви: заднюю ведущую, верхнюю
провисающую, переднюю направляющую,
или, как ее иногда называют, лобовую, и
нижнюю опорную.
ерейдем
теперь к анализу сил, нагружающих
различные участки гусеничных цепей.
Возьмем простейший случай равномерного
движения трактора передним ходом на
горизонтальном участке по твердой
дороге. Представим гусеницы в виде
замкнутого обвода, огибающего четыре
детали (рис. 26): ведущее колесо /, натяжное
(направляющее) колесо 2,
передний и
задний опорные катки 3
и 4.
При принятом
заднем расположении ведущих колес
на гусеничном обводе можно выделить
четыре ветви: заднюю ведущую, верхнюю
провисающую, переднюю направляющую,
или, как ее иногда называют, лобовую, и
нижнюю опорную.
Если верхнюю ветвь рассматривать как абсолютно гибкую свободную нить, то она под действием собственного веса будет провисать по цепной линии. В действительности, из-за предварительного натяжения гусениц и центробежных сил, возникающих при перематывании гусениц но обводу, кривая провисания несколько отличается от цепной линии. В провисающей ветви возникают силы натяжения То, которые приближенно можно считать одинаковыми во всех ее точках и определять по формуле:
![]()
где а — длина пролета провисающей ветви;
q — вес единицы длины гусеницы;
h0 — относительный провес гусеницы (отношение стрелы провисания h к длине провисающего пролета);
vо — скорость перематывания гусеницы по обводу;
g — ускорение свободного падения.
В приведенном уравнении первый член отражает действие статического (предварительного) натяжения гусеницы, а второй член — динамическое воздействие, оказываемое центробежными силами, которые стремятся растянуть провисающую ветвь.
Роль динамических воздействий чувствительно возрастает по мере увеличения скоростей движения машины; на быстроходных гусеничных тягачах она может стать превалирующей.
Для уменьшения сил натяжения, необходимых для получения заданной стрелы провеса, применяется установка под верхней ветвью гусеницы поддерживающих роликов.