

Глава VII синхронные двигатели .
§ 7.1. Принцип действия синхронных двигателей
Если у одного из параллельно работающих генераторов отключить первичный двигатель, то ротор генератора будет продолжать вращаться синхронно в силу того, что статор и ротор по-прежнему упруго связаны между собой магнитными силовыми линиями вращающегося поля. В этом случае в машину будет поступать из сети электрическая мощность и преобразовываться в механическую, т. е. синхронная машина станет работать в режиме двигателя. Отсюда следует, что синхронные машины обладают свойством обратимости.
При
работе машины в режиме двигателя ось
потока статора опережает ось потока
ротора на угол
![]() ,
соответственно, и вектор напряжения
сети UC
опережает вектор э. д. с. E0
на
угол
,
соответственно, и вектор напряжения
сети UC
опережает вектор э. д. с. E0
на
угол
![]() .
.
Для уяснения процесса передачи мощности в синхронной машине рассмотрим на схеме (рис. 7.1) взаимодействие магнитных полей статора и ротора.
На рис71а
дана магнитная
схема генератора, у которого магнитное
поле ротора несколько опережает магнитное
поле статора и между осями потоков
статора и ротора образуется положительный
угол![]()
 При холостом ходе
синхронной
машины оси обоих потоков совмещены
и угол
При холостом ходе
синхронной
машины оси обоих потоков совмещены
и угол
![]() =0
(рис. 7.1,
б). При работе синхронной машины
в двигательном режиме ведущим становится
поток статора,
а ведомым — поток ротора, ось
которого начинает отставать от
оси потока статора на отрицательный
угол
=0
(рис. 7.1,
б). При работе синхронной машины
в двигательном режиме ведущим становится
поток статора,
а ведомым — поток ротора, ось
которого начинает отставать от
оси потока статора на отрицательный
угол
![]() (рис. 7.1, в).
С
увеличением нагрузки на валу
машины увеличивается тормозной
момент и соответственно угол
(рис. 7.1, в).
С
увеличением нагрузки на валу
машины увеличивается тормозной
момент и соответственно угол
![]() .
Одновременно растет развиваемая
двигателем механическая
мощность и потребляемая
из сети электрическая мощность.
.
Одновременно растет развиваемая
двигателем механическая
мощность и потребляемая
из сети электрическая мощность.
Для синхронного двигателя под электромагнитной мощностью понимают мощность, передаваемую вращающимся полем от статора к ротору. Эта мощность преобразуется в механическую, развиваемую ротором. При этом, однако, полезная мощность на валу двигателя меньше электромагнитной на величину потерь — механических, добавочных, в, стали и на возбуждение.
Основная диаграмма э. д. с. синхронного двигателя аналогична основной диаграмме э. д. с. синхронного генератора. Однако в данном случае на диаграмме строится вектор напряжения сети UC,
приложенного к зажимам машины, а не вектор напряжения U, развиваемого на зажимах генератора.
![]()
 равнение
электромагнитной мощности РЭМ
синхронного двигателя
такое же, как и для генератора, с той
разницей, что угол
равнение
электромагнитной мощности РЭМ
синхронного двигателя
такое же, как и для генератора, с той
разницей, что угол![]() считается
отрицательным. Машина
в данном случае не отдает энергию
в сеть, а потребляет ее из
сети. Электромагнитный момент
двигателя прямо пропорционален
электромагнитной мощности
РЭМ
и является вращающим
моментом, уравновешивающим
тормозящий момент на
валу.
считается
отрицательным. Машина
в данном случае не отдает энергию
в сеть, а потребляет ее из
сети. Электромагнитный момент
двигателя прямо пропорционален
электромагнитной мощности
РЭМ
и является вращающим
моментом, уравновешивающим
тормозящий момент на
валу.
Удельная
синхронизирующая
мощность РСХ
двигателя, так
же как и у генератора, определяется
производной от электромагнитной
мощности
по
углу
![]() .
На рис. 7.2 показаны
графики зависимости
.
На рис. 7.2 показаны
графики зависимости
МЭМ
=f(![]() )
и МCX
=f(
)
и МCX
=f(![]() ).
Устойчивой работе двигателя
соответствует
участок кривой в зоне угла
).
Устойчивой работе двигателя
соответствует
участок кривой в зоне угла![]() от 0 до
от 0 до![]() ,
так как в
указанных пределах удельный синхронизирующий
момент сохраняет
свое положительное значение, и увеличение
момента
сопротивления на валу двигателя
сопровождается увеличением
развиваемого машиной вращающего момента.
,
так как в
указанных пределах удельный синхронизирующий
момент сохраняет
свое положительное значение, и увеличение
момента
сопротивления на валу двигателя
сопровождается увеличением
развиваемого машиной вращающего момента.
§ 7.2. Влияние величины тока возбуждения на работу синхронных двигателей
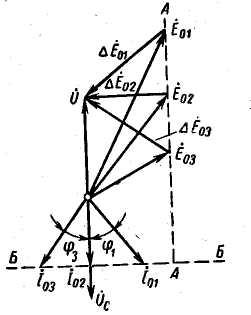
При
постоянной нагрузке на валу синхронного
двигателя (Р=3UI
![]() =const)
с изменением возбуждения двигателя
будет изменяться величина э. д. с,
наводимой в обмотке статора (рис. 7.3).
При
этом концы векторов э. д. с. E01
,E02
и
E03
будут перемещаться по
прямой АА,
а
концы векторов тока — по прямой ББ
так,
как это
было уже показано на рис. 6.32 для генератора.
=const)
с изменением возбуждения двигателя
будет изменяться величина э. д. с,
наводимой в обмотке статора (рис. 7.3).
При
этом концы векторов э. д. с. E01
,E02
и
E03
будут перемещаться по
прямой АА,
а
концы векторов тока — по прямой ББ
так,
как это
было уже показано на рис. 6.32 для генератора.
Когда
э. д. с. машины определяется вектором
E02,
вектор тока I02,сдвинутый
относительно вектора э.д.с.
![]() на 90 , совпадает
по фазе с вектором напряжения
на 90 , совпадает
по фазе с вектором напряжения
![]() (угол
(угол
![]() =0)
и
ток имеет наименьшую величину. При
увеличении тока возбуждения,
а следовательно, и э.д.с. до величины E01
(E01>Е02)
вектор
тока
I01,
опережает вектор напряжения UC
на
некоторый угол
=0)
и
ток имеет наименьшую величину. При
увеличении тока возбуждения,
а следовательно, и э.д.с. до величины E01
(E01>Е02)
вектор
тока
I01,
опережает вектор напряжения UC
на
некоторый угол
![]() ,
зависящий
от величины э. д. с, т. е. образуется
отрицательный угол
сдвига фаз. Двигатель в этом случае
является емкостной нагрузкой
и будет отдавать в сеть излишнюю
индуктивную мощность, которая
может быть использована для намагничивания
потребителей
индуктивной мощности.
,
зависящий
от величины э. д. с, т. е. образуется
отрицательный угол
сдвига фаз. Двигатель в этом случае
является емкостной нагрузкой
и будет отдавать в сеть излишнюю
индуктивную мощность, которая
может быть использована для намагничивания
потребителей
индуктивной мощности.
Такой режим работы двигателя называется перевозбужденным.
При
уменьшении тока возбуждения двигателя
его э. д. с. также
уменьшается (E03<E02)
и
между вектором тока I03
и вектором напряжения
UC
создается
положительный сдвиг фаз на угол
![]() , вектор
напряжения UC
опережает
вектор тока I03.
Двигатель потребляет
из сети индуктивную нагрузку, и его
режим является недовозбужденным.
, вектор
напряжения UC
опережает
вектор тока I03.
Двигатель потребляет
из сети индуктивную нагрузку, и его
режим является недовозбужденным.

![]()
Рис. 7.3. Угловые характеристики синхронных машин
Таким
образом, воздействуя на величину
возбуждения двигателя,
можно менять угол сдвига фаз между его
векторами тока и напряжения.
Двигатель может работать не только с
коэффициентом
мощности, равным единице (![]() ),
но и отдавать в сеть реактивную
индуктивную мощность, способствуя этим
повышению общего
коэффициента мощности сети.
),
но и отдавать в сеть реактивную
индуктивную мощность, способствуя этим
повышению общего
коэффициента мощности сети.
Для
каждой нагрузки синхронного двигателя
можно получить расчетным
или опытным путем зависимости величины
потребляемого
тока I
от тока возбуждения IB
(рис. 7.4). Эти зависимости называются
U-образными
кривыми. Ток IBH
соответствует работе двигателя
при коэффициенте мощности
![]() .
.
Левые ветви характеристик соответствуют индуктивному току (ф>0), а правые ветви — емкостному току (ф<0). Синхронные двигатели, работающие с перевозбуждением, используются для повышения коэффициента мощности электрических установок и называются синхронными компенсаторами.