

§ 9.9. Круговая диаграмма асинхронного двигателя
Рабочие характеристики асинхронного двигателя могут быть построены по круговой диаграмме. Круговая диаграмма с достаточной точностью позволяет проследить характер изменения основных параметров двигателя при изменении его нагрузки Р2 и получить их численные значения.
При прохождении тока I по простейшей электрической цепи, состоящей из постоянного по величине индуктивного сопротивления х (рис. 9.10, а) и переменного активного сопротивления г, на участках цепи создается падение напряжения, имеющее активную Ua=Ir и индуктивную UL=Ix составляющие. Векторы падений напряжений образуют прямоугольный треугольник напряжений ABC (рис. 9.10, б) с постоянной гипотенузой АС=U. Из геометрии известно, что вершина прямоугольного треугольника В лежит на окружности, описанной на диаметре АС и являющейся геометрическим местом точек В.


Рис. 9.10. Основа построения круговой диаграммы
Если стороны прямоугольного треугольника ABC разделить на х, то будет получен треугольник HDC, являющийся треугольником токов (рис. 9.10, в). Вектор HD является вектором тока I.
Конец вектора HD=I при изменении величины активного сопротивления r(U=const, x=const) описывает окружность HDC круга токов.
Вектор
напряжения U
откладывается
в положительном направлении
оси ординат. Вектор тока HD=I
образует
с напряжением U
углы
![]() и т. д. в зависимости от нагрузки.
и т. д. в зависимости от нагрузки.
При
r=оо
ток
I=0
и угол
![]() =0;
при r=0
(чисто индуктивная
нагрузка)
ток I=НС
=
U/x
и отстает от напряжения U
на
90°.
=0;
при r=0
(чисто индуктивная
нагрузка)
ток I=НС
=
U/x
и отстает от напряжения U
на
90°.
На рис.9.5 была приведена схема замещения асинхронного двигателя. При построении круговой диаграммы обычно пользуются преобразованной схемой замещения, в которой намагничивающий контур выделен в самостоятельную цепь (рис.9.11). Рабочий и намагничивающий контуры независимы друг от друга, к их зажимам приложено напряжение U1. По рабочему контуру протекает ток I2', по намагничивающему контуру - ток I0.

Рис.
9.11. Схема замещения асинхронного
двигателя с выделенным намагничивающим
контуром
Работа намагничивающего
контура определяется векторной
диаграммой, приведенной
на рис. 9.12, а. Индуктивное сопротивление
намагничивающего
контура несравненно больше активного.
Угол
![]() близок к 90е.
Рабочий контур схемы замещения подобен
схеме, изображенной
на рис. 9.5. Этот контур содержит индуктивное
сопротивление
x2'+x1
и
переменное активное сопротивление r1=
r2'/s.
близок к 90е.
Рабочий контур схемы замещения подобен
схеме, изображенной
на рис. 9.5. Этот контур содержит индуктивное
сопротивление
x2'+x1
и
переменное активное сопротивление r1=
r2'/s.
 При изменении
величины скольжения s
меняется геометрическое место
точек вектора тока на окружности
При изменении
величины скольжения s
меняется геометрическое место
точек вектора тока на окружности

Рис. 9.12. Круг токов
Круговая диаграмма представляет собой совмещение диаграмм рабочего и намагничивающего контуров (рис. 9.12, б). На приведенной диаграмме потребляемый двигателем ток равен геометрической сумме токов I1=Io+(- I2')-
Круговая диаграмма строится на основании опытов холостого хода и короткого замыкания.
При проведении опыта холостого хода (рис. 9.13) двигатель работает вхолостую. Параметры холостого хода I0 и P0 снимают при
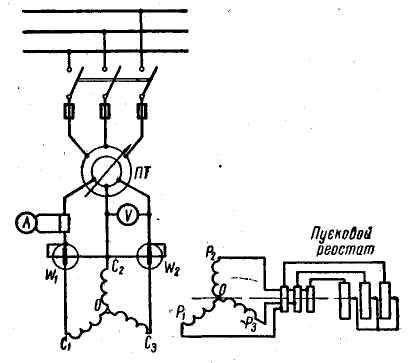
Рис. 9.13. Опыт холостого хода асинхронного двигателя
различных значениях подводимого напряжения, которое изменяется от 0,5 до 1,2 (/„, с помощью поворотного трансформатора ПТ. Обычно круговая диаграмма строится при Ui=Uia. По показаниям измерительных приборов получают значения /0 и Ро для напряжения U1н, подводимого к обмотке статора. По полученным данным вычисляют
![]()
Опыт
короткого замыкания проводят по схеме,
изображенной на рис.
9.13, но при заторможенном роторе и
замкнутой накоротко его
обмотке; напряжение при этом понижается
до (0,15—0,25) UH.
Проводить
опыт короткого замыкания при номинальном
напряжении
нельзя, так как в этом случае ток короткого
замыкания /к
3
может
составить (7![]() 4)
Iн.
4)
Iн.
Мощность короткого замыкания РКЗ. определяется по показанию ваттметра при напряжении UКЗ при котором ток Iк.3 = Iн
Полученные данные Iк.3 и PК.З пересчитывают на номинальное напряжение:
![]()
С![]() опротивления
гК3
и хКЗ
считаются неизменными,
опротивления
гК3
и хКЗ
считаются неизменными,
![]() при
пересчете также не меняется и определяется
по формуле.
при
пересчете также не меняется и определяется
по формуле.
П![]() остроение
линии тока. Для построения круговой
диаграммыиспользуются
данные опытов холостого хода и короткого
замыкания:
ток холостого хода I0
при номинальном напряжении и частоте;
мощность
при холостом ходе P0;
фазный
ток статора короткого замыкания
IКЗ
при номинальном напряжении, полученный
при пересчете
по формуле
остроение
линии тока. Для построения круговой
диаграммыиспользуются
данные опытов холостого хода и короткого
замыкания:
ток холостого хода I0
при номинальном напряжении и частоте;
мощность
при холостом ходе P0;
фазный
ток статора короткого замыкания
IКЗ
при номинальном напряжении, полученный
при пересчете
по формуле
п![]() отери
короткого замыкания при номинальных
напряжении и частоте, полученные в
результате
пересчета по формуле
сопроти
вление
фазы обмотки статора r1
приведенное
к рабочей температуре.
отери
короткого замыкания при номинальных
напряжении и частоте, полученные в
результате
пересчета по формуле
сопроти
вление
фазы обмотки статора r1
приведенное
к рабочей температуре.
Построение
начинают с вектора U1
приложенного
к двигателю напряжения, который
откладывают по оси ординат (рис. 9.14).
Задаются
масштабом тока и под углом
![]() к вектору напряжения U1
проводят
вектор тока холостого хода IО=0H,
а под углом
к вектору напряжения U1
проводят
вектор тока холостого хода IО=0H,
а под углом
![]() — вектор тока короткого замыкания
IКЗ.=ОК.
Точки Н
(конец
вектора
тока
IО)
и К
(конец
вектора IК.З
Н)
соединяют прямой линией НК
и
из ее середины, точки М,
опускают
перпендикуляр до пересечения
с линией НС,
проведенной
из точки Н
параллельно
оси абсцисс.
Точка О1
пересечения перпендикуляра MО1
с
основанием НС
является
центром окружности токов, из которого
радиусом О1Н
строят
окружность токов.
— вектор тока короткого замыкания
IКЗ.=ОК.
Точки Н
(конец
вектора
тока
IО)
и К
(конец
вектора IК.З
Н)
соединяют прямой линией НК
и
из ее середины, точки М,
опускают
перпендикуляр до пересечения
с линией НС,
проведенной
из точки Н
параллельно
оси абсцисс.
Точка О1
пересечения перпендикуляра MО1
с
основанием НС
является
центром окружности токов, из которого
радиусом О1Н
строят
окружность токов.

Рис9.14 построение круговой диаграммы
Для определения величин токов из точки О в выбранном масштабе откладывают вектор OD тока нагрузки IH. При изменении нагрузки точка D (конец вектора OD) перемещается по окружности НК. При холостом ходе точка D совмещается с точкой Н, а при коротком замыкании — с точкой К..
Если точку D соединить с точкой Н, то получится треугольник токов ODH. Из этого треугольника, зная масштаб токов mi определяют ток I2'=HD- Если же из точки D опустить перпендикуляр. на ось абсцисс ОЕ, то из прямоугольного треугольника ODa определяют активную составляющую тока I1a= miDa и реактивную составляющую тока I1p=mi0а.
Построение
линий мощности. Подведенная к двигателю
мощность
P1
определяется
по формуле P1=![]() .
Если U1=const,
a
.
Если U1=const,
a
![]() ,
то подведенная мощность пропорциональна
активной
составляющей тока статора (P1=I1a).
Изменение нагрузки вызывает
одновременное перемещение точки D
по
окружности токов И
точки а
по
оси абсцисс. Отсюда подведенная мощность
может быть
определена по формуле P1=
mpDa,
где
mp=
,
то подведенная мощность пропорциональна
активной
составляющей тока статора (P1=I1a).
Изменение нагрузки вызывает
одновременное перемещение точки D
по
окружности токов И
точки а
по
оси абсцисс. Отсюда подведенная мощность
может быть
определена по формуле P1=
mpDa,
где
mp=![]() U1H
,
mp-масштаб
мощности.
U1H
,
mp-масштаб
мощности.
Так как отсчет подведенной мощности всегда производится от оси абсцисс, то линия ОЕ называется линией подведенной мощности,
Линия полезной мощности Р2 на круговой диаграмме представляет собой прямую, проходящую через точки на окружности токов, в которых полезная мощность равна нулю, т. е. через точки Н и K .Отсюда, линия НК является линией полезной мощности, а полезная мощность Р2 Для тока нагрузки I1H=OD определяется отрезком Db с учетом масштаба мощности P2= mpDb.
Линия электромагнитной мощности Рэм является одновременно линией вращающего момента М. Для построения линии электромагнитной мощности Рэм и вращающих моментов М надо опустить из точки К перпендикуляр на линию НС. Полученный отрезок КК3 делится в отношении
![]()
![]()
где активное сопротивление одной фазы обмотки статора при опыте к.з.
r1 -активное сопротивление одной фазы обмотки статора
Вычислив
и наметив положение точки K2
на
отрезке ККз,
проводят
через нее и точку Н
(в
которой скольжение s=±0)
прямую
до ее пересечения с окружностью тока —
точка Т.
Прямая
НТ
и
является линией электромагнитной
мощности и вращающих
моментов, проходящей через точки, в
которых скольжение s=0
(точка H)
и s=
±![]() (точка Т).
(точка Т).
В![]() еличина
электромагнитной мощности определяется
по формулеPЭM=
mpDc,
а
вращающий момент — по формуле M=mMDc
(где
еличина
электромагнитной мощности определяется
по формулеPЭM=
mpDc,
а
вращающий момент — по формуле M=mMDc
(где
Построение линии скольжения. Для построения линии скольжения из точки Н восстанавливают перпендикуляр Ht и проводят параллельно линии электромагнитной мощности НТ прямую tQ, пересекающую перпендикуляр Ht и продолжение линии НК.. Полученный отрезок прямой tQ делят на 100 равных частей (величина скольжения в %). Величина скольжения для данной нагрузки определяется продолжением линии HD=I2' до пересечения с линией скольжения. Численное значение на шкале соответствует величине скольжения.
Графическое
определение коэффициента мощности.
Для определения
величины коэффициента мощности на оси
ординат строят окружность
произвольного диаметра. Коэффициент
мощности
![]() определяется
как отношение
Oh/Of.
Если диаметр окружности взять
равным
100 мм,
то
определяется
как отношение
Oh/Of.
Если диаметр окружности взять
равным
100 мм,
то
![]() =Oh/100
.
=Oh/100
.
Графическое
определение к. п. д.
Для графического определения величины
к. п. д. двигателя строят шкалу к. п. д.
![]() в
%. Для этого продолжают линию полезной
мощности НК
за
линию абсцисс. Из точки
L,
пересечения продолжения линии полезной
мощности НК
с
линией абсцисс ОЕ,
опускают
перпендикуляр — линию суммарных
потерь. Шкалу к. п. д.
в
%. Для этого продолжают линию полезной
мощности НК
за
линию абсцисс. Из точки
L,
пересечения продолжения линии полезной
мощности НК
с
линией абсцисс ОЕ,
опускают
перпендикуляр — линию суммарных
потерь. Шкалу к. п. д.
![]() проводят
параллельно линии подведенной
мощности между продолжениями линий
полезной мощности и
суммарных потерь — прямая
mn.
При
этом следует стремиться к
тому, чтобы отрезок линии mn
удобно
делился на 100. Фактическое значение
к. п. д. при заданной нагрузке определяется
показанием шкалы
в точке пересечения прямой линии,
проведенной через точки
проводят
параллельно линии подведенной
мощности между продолжениями линий
полезной мощности и
суммарных потерь — прямая
mn.
При
этом следует стремиться к
тому, чтобы отрезок линии mn
удобно
делился на 100. Фактическое значение
к. п. д. при заданной нагрузке определяется
показанием шкалы
в точке пересечения прямой линии,
проведенной через точки
D и L.
Построение
рабочих характеристик.
Рабочие характеристики асинхронных
двигателей небольшой мощности могут
быть определены
в результате измерений тока I1,
мощности Р1
скорости
вращения
п2
и
момента М
на
валу машины при различных нагрузках.
По данным измерений рассчитывают Р2,
![]() ,
скольжение и
к. п. д.
,
скольжение и
к. п. д.
![]() .
У
машин средней и большой
мощности
результаты измерений не всегда дают
достаточно точные результаты. Рабочие
характеристики
в этом случае могут быть определены
косвенным путем
при помощи круговой диаграммы. Для их
построения используют
либо расчетные, либо опытные данные,
полученные из опытов холостого
хода и короткого замыкания.
.
У
машин средней и большой
мощности
результаты измерений не всегда дают
достаточно точные результаты. Рабочие
характеристики
в этом случае могут быть определены
косвенным путем
при помощи круговой диаграммы. Для их
построения используют
либо расчетные, либо опытные данные,
полученные из опытов холостого
хода и короткого замыкания.
Порядок построения круговой диаграммы разобран выше. Задаваясь различными значениями токов статора I1 (0,25, 0,5, 0,75, 1,0 и 1,25 IH) и масштабом тока, строят на окружности точки D1 D2, D3 и т. д. и в масштабе основные линии и характеристики.