

ВОПРОСЫ
ОРЛ-А
ОРЛ-Т
ВРЛ
МПСН (МНОГОПОЗИЦИОННАЯ СИСТЕМА НАБЛЮДЕНИЯ)
АЗН-К
АЗН-В
АРП
VOR
DME
VOR/DME
DVOR/DME
МАРКЕРНЫЕ РАДИОМАЯКИ
ПРИВОДНЫЕ РАДИОСТАНЦИИ
СПУТНИКОВАЯ СИСТЕМА НАВИГАЦИИ
ЛККС
ССП
АВТОМАТИЗАЦИЯ ПРОЦЕССОВ УВД
АС УВД
КСА УВД
АРМ
СРЕДСТВА РАДИОСВЯЗИ УКВ ДИОПОЗОНА (ОВЧ)
СРЕДСТВА РАДИОСВЯЗИ КВ ДИОПОЗОНА (ВЧ)
ПЕРЕДАЮЩИЙ ПРЦ, ПРИЕМНЫЙ ПРМЦ, РАДИОЦЕНТРЫ
АППЦ
АВТОНОМНЫЙ РЕТРАСЛЯТОР
ОРЛ-А. Назначение, основные сведения, размещение на а/д. Типы. Характеристики
Обзорный радиолокатор аэродромный предназначен для обнаружения и
определения координат (азимут-дальность) воздушных судов в районе аэродрома с
последующей передачей информации о воздушной обстановке в центры (пункты)
ОВД для целей контроля и обеспечения управления воздушным движением.
Период обновления информации составляет не более 6 секунд.
Допускается отсутствие радиолокационной информации от ОРЛ-А в трех-пяти
обзорах подряд от воздушного судна, совершающего маневр разворота или
находящегося на участке с тангенциальным направлением скорости при
выполнении полета по стандартному маршруту захода на посадку. Антенная
система ОРЛ-А юстируется относительно магнитного меридиана.
Радиолокационная информация ОРЛ-А может использоваться для целей
контроля и управления воздушным движением во внеаэродромной зоне (на
воздушных трассах и вне трасс) в районных центрах управления воздушным
движением. В этом случае координатная информация (азимутальная), предназначенная для
районного центра, пересчитывается относительно истинного меридиана
оборудованием обработки ОРЛ-А или оборудованием управления воздушным
движения районного центра или другим специальным оборудованием.
ОРЛ-А должен быть расположен таким образом, чтобы обеспечивался РЛК за полётами ВС на контролируемых маршрутах в районе данного аэродрома. В СПб на одной позиции расположено два ОРЛ-А, основной ЛИРА А-10 и резервный ИРТЫШ, который заменяет основной 2 раза в месяц на время тех. проверок ЛИРА А-10. Расположены на возвышенности на территории Южного кладбища.
В состав оборудования ОРЛ-А должно входить:
АФС
Приёмо-передающая аппаратура, аппаратура опознавания;
Первичный канал радиолокатора
Встроенный вторичный канал радиолокатора или автономный ВРЛ, сопряжённый с ОРЛ-Т
Аппаратура обработки РЛК информации.
Аппаратура сопряжения с системами отображения воздушной обстановки или АС УВД
Аппаратура передачи данных
Система контроля, управления и сигнализации
Комплекты ЗИП и эксплуатационной информации.
Аэродромный РЛК
"ЛИРА-А10"
АРЛК
"ЛИРА-А10" предназначен для
использования в качестве источника
радиолокационной информации о воздушной
обстановке в зоне аэропортов для
автоматизированных и неавтоматизированных
систем УВД и обеспечивает: определение
координат и траекторий движения воздушных
судов (ВС) - как оборудованных, так и не
оборудованных ответчиками; запрос,
получение и выдачу информации, выдаваемой
бортовыми ответчиками ВС по стандарту
ИКАО и по ГОСТ 21800-89; сопряжение и выдачу
информации потребителям насистемы УВД
"Синтез", "Спектр", "Старт",
"Норд" ("Альфа"), "ТОПАЗ",
"Карм-АУ", "Карм-ДРУ" или на
другие по заказу потребителя.
РЛК
"ЛИРА-А10" является высокостабильной
системой с использованием когерентных
методов подавления мешающих отражений
и состоит из: антенного модуля, состоящего
из отражателя, двухканального облучателя,
поляризатора, опорно-поворотного
устройства, токосъемника, вращающего
сочленения, приводов азимутального
вращения и сборной башни высотой до 9
м, в зависимости от радиолокационной
позиции, набираемой секциями по 3 м;
аппаратного модуля, включающего в себя
передающую систему на базе клистронного
усилителя, состоящую из двух независимых
каналов, работающих на разных частотах,
приемную систему, цифровую систему
обработки сигнала с адаптивным
управлением, систему автоматизированного
контроля, систему электропитания и
встроенный вторичный радиолокатор;
резервную дизельэлектростанцию.
Основные
тактико-технические характеристики
трассового радиолокационного комплекса
"ЛИРА-А10":
Диапазон рабочих частот: первичной РЛС. S (2700 - 2900 Мгц) вторичной РЛС. международный и отечественный диапазоны
Пределы работы: максимальная дальность 120 км.; минимальная дальность 1,5 км ; по азимуту З60 град ;по углу места 0,5-45 град
Точность определения координат (СКО) на выходе АПОИ: по дальности 150 м;по азимуту 9 утл. мин
Разрешающая способность на выходе АПОИ: для ПРЛ: по дальности 300 м по азимуту 1,7 град; для ВРЛ: по дальности 1000 м; по азимуту 4 град
Вероятность объединения координат ПРЛ и ВРЛ с выхода АПОИ: по одному самолету не менее 0,95 , координатной и полетной информации. 0,96
Коэффициент подавления отражений от неподвижных целей 46 дб
Темп обновления информации 5 с
Скорость обнаруживаемых целей от 40 до 1500 км/ч
Количество одновременно сопровождаемых трасс не менее. 250
Мощность, потребляемая от первичной сети не более. 60 кВА
Среднее время наработки на отказ 7000 ч
Изготовитель КБ Лира(Россия). Также широко используются аэродромные локаторы КБ Лира типа Лира 1, Утёс-А. Стоит отметить Челябинский радиозавод «Пилот» производящий РЛ А "ОРЛ-85М"и Экран-85.
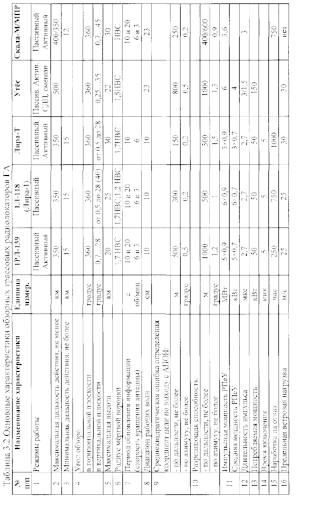
Основные характеристики ОРЛ-А
максимальная дальность 100-160км
угол обзора 360°
минимальная дальность 1,5км.
период обновления инф. 6с.
Диапазон волн 10см. или 23см.
Точность определения информации не более 200м и 0,2°
Разрешающая способность не хуже 500м и не хуже 4°
ОРЛ-Т. Назначение, основные сведения, размещение на а/д. Типы. Характеристики
Обзорный радиолокатор трассовый предназначен для обнаружения и
определения координат (азимут - дальность) воздушных судов во внеаэродромной
зоне (на воздушных трассах и вне трасс) с последующей выдачей информации о
воздушной обстановке в центры (пункты) обслуживания воздушного движения для
целей контроля и обеспечения управления воздушным движением. Антенная
система обзорного радиолокатора трассового юстируется относительно истинного
меридиана.
ОРЛ-Т должен быть размещен таким образом, чтобы обеспечить радиолокационный контроль за полётами ВС в секторах прохождения воздушных трасс данного района УВД. Место установки должно выбираться так, чтобы обеспечивался минимум переотражений по вторичному каналу (если оснащен ВРЛ). Переотражение не должно попадать в зону контролируемых ВТ. В Пулково используется Утёс-Т, работающий как по первичному(Утес), так и вторичному каналу(Лира),и расположен на территории Южного кладбища на возвышенности.
В состав оборудования ОРЛ-Т должно входить:
АФС
Приёмо-передающая аппаратура, аппаратура опознавания;
Первичный канал радиолокатора
Встроенный вторичный канал радиолокатора или автономный ВРЛ, сопряжённый с ОРЛ-Т
Аппаратура обработки РЛК информации.
Аппаратура сопряжения с системами отображения воздушной обстановки или АС УВД
Аппаратура передачи данных
Система контроля, управления и сигнализации
Комплекты ЗИП и эксплуатационной информации.
Основные характеристики ОРЛ-Т
максимальная дальность 350-400км
угол обзора 360°
минимальная дальность 40км.
период обновления инф. 10с.
Диапазон волн 10см. или 23см.
Точность определения информации не более 300м и 0,25°
Разрешающая способность не хуже 1000м и не хуже 1,3°
Трассовый обзорный радиолокатор Утёс-Т
Первичный трассовый обзорный радиолокатор комплекса УТЕС-Т работает в диапазоне дециметровых волн и является высокостабильным радиолокационным комплексом, построенным по принципу истинной когерентности. РЛК «УТЕС-Т» может комплектоваться встроенным ВРЛ. Двулучевая антенная система формирует зоны обзора в вертикальной плоскости в диапазоне от 0,5° до 45°. В горизонтальной плоскости зона обзора обеспечивается механическим вращением антенны со скоростью 6 об/мин. Вычислительное устройство позволяет вычислить координаты ВС и формирует контуры метеообразований в шести градациях. Головной процессор объединяет отметки ПРЛ и ВРЛ, выполняя функции вторичной обработки информации. Автоматизированная система контроля и управления режимами работы РЛК производится как с местного пульта, так и дистанционно. Встроенное контрольное оборудование позволяет осуществлять диагностику и поиски неисправностей. Высокая степень автоматизации РЛК наряду с его высокой надежностью обеспечивает возможность работы без постоянного присутствия на РЛК позиции персонала.
ОВРЛ. Назначение, основные сведения, размещение на а/д. Типы. Характеристики
Вторичный радиолокатор предназначен для обнаружения, определения
координат (азимут-дальность), запроса и приема дополнительной информации от
воздушных судов, оборудованных ответчиками, с последующей выдачей
информации в центры (пункты) ОВД.
Участок ВРЛ должен быть размещен таким образом, чтобы обеспечить непрерывный РЛК ВС, оборудованным самолётными ответчиками на контролируемых маршрутах. В секторах прохождения основных контролируемых трасс величины углов закрытия по углу места с высоты расположения фазового центра не должны превышать 0,5°. В радиусе 1,5км от места размещения ВРЛ не должно быть крупных металлических и железобетонных конструкций и сооружений, которые могут создавать переотраженные сигналы по вторичному каналу радиолокатора.
Основные характеристики:
Режимы работы УВД и RBS
Максимальная дальность 400км для ВРЛ-Т и 250-150км для ВРЛ-А
Минимальная дальность не более 2км.
Период обновления информации 6-10с.
Частота работы 1030мГц
Разрешающая способность не хуже 1000м и 4°
Вероятность получения достоверной информации 0,98
Точность определения информации не более 300-200м и 0,25-02°
Принцип работы:
Запросчик с помощью основной антенны, вращающейся по азимуту запрашивает коды на частотах запроса. Эти запросы принимаются ненаправленными антеннами(Ответчиками). В приёмоответчике ВС формируется ответ на запрос, который излучается этими же антеннами в воздушном пространстве на частоте ответа. Ответная информация содержится в кодированном виде и принимается основной и антенной подавления. После преобразований информация подаётся в групповую аппаратуру КДП. После расшифровки в соответствии с режимом выдаётся инф:
А) Отметка РЛ и сведения о номере сквока рейса(4 цифры)
С) В этом режиме передаются сведения о барометрической высоте
S) Адресная информация отдельному ВС содержащая всю вышеперечисленную инф.
D) Комбо режим
Существует два запросных кода для ВРЛ работающего в режиме УВД
При запросе кода БН ответчика на индикаторе диспетчера высвечивается номер борта
При запросе ТИ ответчик отвечает текущую высоту в метрах(Границы от 300-400 до 30000м), сведения о запасе топлива, Признак высоты либо Авария.
Система ВРЛ имеет основной недостаток- вредное влияние боковых и задних лепестков диаграммы направленности(20% мощности), поэтому устанавливается защита от влияния боковых лепестков по каналу запрос-ответ.
Существующая система ВРЛ является неселективной. В результате Запрос -Ответа образуется очередь ответов и диспетчер вынужден выбирать то ВС, которое ему нужно.
Для УВД используется автономный ВРЛ и ВРЛ встроенные в ПРЛ
Диаграммы направленности в вертикальной плоскости совмещаются для ВРЛ встроенного в ПРЛ.
ОВРЛ:
Аврора МВРЛ (моноимпульсный ВРЛ)
АЗН «Аврора-2»
Аврора-S
Радуга
Корень АС, Корень С, Корень СК.( являются основными вторичными локаторами в АС УВД России)
Крона
Встроенные ВРЛ
Лира В
Лира ВА(обзорный радиолокационный комплекс)
МПСН. Назначение, основные сведения, размещение на а/д. Типы. Характеристики
Многопозиционные системы наблюдения (МПСН), основанные на многопозиционных технологиях АЗН-В, активно используются в качестве высокоточного источника информации о воздушной обстановке в аэропортовых, аэродромных и трассовых зонах УВД.
Наземная станция аэродромной многопозиционной системы наблюдения(АМПСН)
предназначена для определения местоположения и управления движением
воздушных судов, спецавтотранспортом, техническими средствами и другими
объектами, оборудованных ответчиками, находящихся на посадочной прямой и
рабочей площади аэродрома (площади маневрирования и перроне, на взлетно-
посадочной полосе, рулежных дорожках и местах стоянок воздушных судов). Московский аэропорт Домодедово первым в России устанавливает аэродромную многопозиционную систему наблюдения. Установка АМПСН и ее интеграция в уже работающую в Домодедово систему A-SMGCS (Усовершенствованная система управления наземным движением и контроля за ним) является наилучшим решением обеспечения контроля за наземным движением на аэродроме. Объединенные функции двух систем обеспечат наиболее полное и точное отображение на мониторах диспетчеров вышки УВД местоположения и передвижения самолетов и транспортных средств на взлетно-посадочных полосах, рулежных дорожках и перронах аэропорта. В основе новой системы лежит развертывание сети наземных станций системы АМПСН, рассредоточенных по всему аэродрому, стойки центральной обработки информации и 150 маяков (передающих устройств), установленных на спецтранспорт.
МПСН «Мера» от ВНИИРА сконструирована таким образом, чтобы отвечать всем современным требованиям, предъявленным к системам наблюдения, и азработана в двух исполнениях
Для работы на поверхности а/д и на подлётах к нему(АМПСН)
Широкозонная МПСН(WAM)
Наземная станция широкозонной многопозиционной системы наблюдения предназначена для определения местоположения и управления движением воздушных судов оборудованных бортовыми ответчиками работающими в международном диапазоне (в режимах А/С и S) в верхнем и нижнем воздушном пространстве.
Концерн ПВО "Алмаз-Антей" успешно завершил в аэропорту Пулково (Санкт-Петербург) государственные испытания широкозонной многопозиционной системы наблюдения (МПСН) "Мера", которая была развернута в 2012 г. для организации наблюдения за воздушным пространством в районе Санкт-Петербурга. Но система может быть установлена как в маленьких, так и в крупных аэропортах, а также в местах со сложным рельефом местности.
Основные отличия активной МПСН от ВРЛ режима S
Оборудование: распределительный характер, отсутствие вращающейся антенны
Стоимость оборудования для МПСН ниже
ТТХ: меньше период обновления(до 1 сек.), большая точность при больших дальностях
Не является полностью независимой: синхронизация МПСН через ГНСС
Основные подсистемы МПСН «Мера»
Антенна
Сенсор-приёмная станция ЭМБЕР, принимает и декодирует ответы RBS и АЗН-В
Для WAM- способность спутниковой синхронизации времени
Запросчик /синхронизатор( частоты работ 1030-1090мГц, 2 комплекта резервирования
Концентратор – обмен информацией с сенсорами и запросчиками по внутрисистемной линии связи, формирование треков, передача данных потребителю, управление запросами, контроль управления системой.
Каналы связи(беспроводная, медная, оптическая).
Система АЗН-К. Назначение, принцип функционирования. Передаваемая информация и линии передачи.
Наземная станция контрактного автоматического зависимого наблюдения предназначена для наблюдения за воздушными судами при приеме информации с борта воздушного судна, имеющего соглашение на передачу данной информации конкретному органу управления воздушным движением. Информация о местоположении формируется на борту воздушного судна и передается по линиям передачи данных следующих типов:
спутниковая линия передачи данных;
линия передачи данных в очень высокочастотном ( ОВЧ) диапазоне;
линия передачи данных в высокочастотном (ВЧ) диапазоне;
и другие линии передачи данных.
Информация, после ее обработки по наземным сетям связи доставляется в
орган управления воздушного движения, под управлением которого в данный момент времени находится воздушное судно.
Технология АЗН-К является самым простым по структуре вариантом автоматического зависимого наблюдения и представляет собой, по сути дела, обобщение принципа вторичной радиолокации. ВРЛ постоянно посылает запросы, а бортовой трансивер ВС посылает затребованную информацию. Т.о. ВРЛ связан с ВС по низкоскоростной ЛПД, образованной по принципу запрос-ответ. Если предположить, что антенна локатора ненаправленная и широковещательный запрос вызвал поток ответов от ВС. Декодировать этот потом невозможно из-за наложения, поэтому локатор должен посылать бортам не широковещательные, а адресные запросы. Именно на этом принципе основана технология АЗН-К. Автоматическая передача данных с борта начинается после того как ВС (эксплуатант) и орган УВД подписались на получение этих данных. Содержимое и частота посылок определяются контрактом. Еще до появления стандартов ICAO в США была сделана попытка реализации АЗН-К, в результате чего появились комплекты бортового оборудования FANS-1 FANS-2. В РФ применение этой системы планируется в Дальневосточном и Арктическом регионах. Деятельность по внедрению системы FANS началась с установки в РГП «Магаданэроконтроль» оборудование FANS фирмы ARING. Однако система оказалась несовместимой с появившимися позднее стандартами ICAO. Поэтому систему могут использовать только в Океанических и малонаселённых регионах.
Билет 6. Система азн-в.
Наземная станция широковещательного автоматического зависимого наблюдения. Автоматическое, так как работает автоматически и не требует вмешательства оператора. Зависимое потому что информация полученная системой АЗН и передаваемая на рабочее место диспетчера зависит от оборудования на борту ВС (FMS) и ГНСС. Наблюдение осуществляется подобно радарным системам. Широковещательная непрерывная радиотрансляция данных всем самолетам и наземным станциям.
АЗН предназначена для определения координат ВС с помощью спутниковой системы и наземного оборудования ЛККС (локальная контрольная корректирующая система) и передачи информации на КДП, при этом информация (от АЗН – широта, долгота, высота) складывается с координатной информацией (дальность, азимут), полученной от РЛС.
Основные виды применения АЗН:
Организация центральной линии передачи данных «борт-земля» (в цифровом виде)
Обмен данными между ВС по каналу «борт-борт»
Обеспечение навигации
Обеспечение задач вихревой безопасности
Обеспечение ЭВС информацией о ВО, а также о метеообстановке
Создание более эффективной системы предупреждения столкновений (бортовые; наземные (TKAS))
Предотвращение столкновений с землей – СРПБЗ
Управление беспилотниками
Оперативное определение местоположения ВС в случае аварийной посадки
Состав системы АЗН:
Космический сегмент
Бортовой комплект оборудования: приемо-передатчик, транспондер, ИВО (опция), антенны, ЛККС
Наземное оборудование: транспондер, ЛККС (опция) – для формирования дифференциальных поправок, рабочее место диспетчера.
Типы АЗН:
АЗН-К Контрактного типа
АЗН-В Широковещательного типа
Частота запроса – 1030мГц Частота ответа – 1090мГц
Наземная станция широковещательного АЗН предназначена для наблюдения за ВС при приеме информации с борта ВС о его местоположении, а также другой дополнительной информации, передаваемой по линии передачи данных в вещательном режиме. По своей сути, это технологическое решение, определяющее координаты самолета используя для этого ГНСС, и затем, транслирующие их и другие данные (высота, скорость, рейс и пр.) о полете как в наземные центры диспетчерам, так и другим самолетам. Качество информации с борта ВС контролируется с помощью контрольного приемника. С помощью аппаратуры наземного функционирования дополнительная информация принятая от спутника корректируется и дополняется с помощью ЛККС.
АЗН-В позволяет пилотам и диспетчерам видеть одну и ту же картину происходящего, что повышает взаимопонимание между всеми участниками движения, повышая тем самым безопасность и гибкость УВД. При широковещательном АЗН информация передается с борта ВС на диспетчерский пункт и на соседний ВС, если на нем есть оборудование, периодически, не ожидая запроса (например 1 сообщение в сек). В результате чего ЭВС на своем дисплеи видит воздушную обстановку в R=200м. Доступ к ADS-B информации бесплатен и свободен для всех. ADS-B также передает в реальном времени погодную информацию пилотам.
Ключевой особенностью АЗН-В является способность работать без сложной наземной инфраструктуры.
Транспондер – устройство, содержащие ГНСС приемник, цифровой УКВ приемопередатчик и контроллер, связывающий эти устройства. Все приемопередатчики настроены на одну частоту, т.е. ВС, которые находятся в пределах прямой видимости друг от друга - связаны одним цифровым радиоканалом. Каждый из них получает координатную информацию о других ВС и транслирует свои координаты. В итоге строится принцип «все видят всех»
К линиям передачи данных относятся:
линия передачи данных режима «S» ВРЛ;
линия передачи данных в УКВ диапазоне четвертого типа (Временной способ разделения доступа. Все потребители могут получить привязку к единой шкале времени с точность порядка 100мкс, благодаря тому, что в состав транспондера входит ГНСС-приемник. Прослушивая эфир, каждый транспондер определяет слоты, которые он может занять, не конфликтуя с интересами других пользователей канала. После этого в выбранных слотах начинается трансляция координат);
другие линии передачи данных, реализующих АЗН-В.
Структура системы АЗН:
ИСЗ (ГЛОНАСС,GPS)—навигационная информация Бортовой сегмент ( навигационный аппарат потребителя антенно-фидерная система передающая аппаратура спутниковой связи) сообщение АЗН ИСЗ ->ретранслятор спутниковой системы связи центр УВДназемная аппаратура станции связиустройство обработки сообщенийаппаратура обработки информации.
Виды предоставляемой информации:
информация ЭВС о ВО - TIS-B;
ПИО-FIS-В;
связь «диспетчер-пилот» - CPDLC
Наземная приемная станция СОНАР.
Наземная приемная станция самогенерируемых радиовещательных сигналов «Сонар» предназначена:
• для наблюдения за находящимися в зоне видимости станции ВС и транспортными средствами, оснащенными оборудованием, обеспечивающим функции АЗН (1090ES – частота работы)
• для цифровой обработки информации и передачи данных наблюдения в центры УВД
ТТХ:
Сопряжение с системами отображения и АС (КСА) УВД осуществляется с использованием ЛВС
Количество антенн в антенной системе 4
Зона действия:
дальность обнаружения не менее 400 км
азимут 0–360°
высота обнаружения не менее 20 000 м
минимальный угол места не более 0,5°
Параметры сопровождения:
количество одновременно сопровождаемых целей не менее 200
вероятность обновления информации каждые 2 сек не менее 0,98