

3.Гидродинамические и восстанавливающие силы.
3.1Гидродинамические демпфирующие силы.
Гидродинамическое демпфирование МПО вызвано:
![]() -
наведенным потенциальным демпфированием
от волновых воздействий;
-
наведенным потенциальным демпфированием
от волновых воздействий;
![]() -
линейным трением о поверхностный слой
от ламинарных пограничных потоков и
квадратичным поверхностным трением от
турбулентных пограничных потоков;
-
линейным трением о поверхностный слой
от ламинарных пограничных потоков и
квадратичным поверхностным трением от
турбулентных пограничных потоков;
![]() -
демпфирование типа волновой дрейф;
-
демпфирование типа волновой дрейф;
![]() -
демпфирование от вихревых потоков при
наличии шероховатости корпуса.
-
демпфирование от вихревых потоков при
наличии шероховатости корпуса.
Соответственно, обобщенная матрица гидродинамического демпфирования представляет сумму указанных компонентов
![]() , (3.1)
, (3.1)
где
![]() удовлетворяет
следующим свойствам:
удовлетворяет
следующим свойствам:
вещественная, не симметричная и строго
положительна
![]() и квадратичная форма
и квадратичная форма
![]() .
.
На практике обычно ограничиваются рассмотрением сил трения в поверхностном слое.
Общий вид матриц демпфирования.
Для надводных кораблей
Для низкоскоростных судов, двигающихся
по прямой вдоль оси 0х в отсутствии
вертикальной , боковой и килевой качек
гидродинамические силы![]() и моменты(
и моменты(![]() можно
записать
можно
записать
 ,
причем
,
причем![]()
![]() ;
;![]() (3.2)
(3.2)
тогда![]()
Для подводных аппаратов
В общем случае, демпфирование подводных аппаратов, двигающихся в пространстве [6DOF] с высокой скоростью будет существенно нелинейным. Тем не менее грубая аппроксимация для аппаратов имеющих три плоскости симметрии и при условии пренебрежения членами второго порядка малости допустима
 (3.3)
(3.3)
Потенциальное демпфирование
Силы вызывающие вынужденные колебания с частотой набегающих волн могут быть связаны с присоединенными массами, демпфирующими силами и восстанавливающими силами и моментами (потенциальными силами Архимеда и веса). Волновые наведенные демпфирующие силы незначительны для аппаратов на большой глубине, однако для надводных кораблей они могут быть весьма значительны [4]. Расчет этих сил рассматривается в разделах связанных с расчетом качки.
Трение в поверхностном слое
Линейное трение в слое, в соответствии с теорией о ламинарном пограничном слое, важно при рассмотрении низкоскоростного движения МПО. Реальные объекты движутся с достаточно большими скоростями, что вызывает турбулентность в слое и трение рассматривается как нелинейное (обычно квадратичное) [4].
![]() .
.
В этом случае проекции главного вектора и главного момента гидродинамических сил на оси связанной системы координат определяют следующим образом:
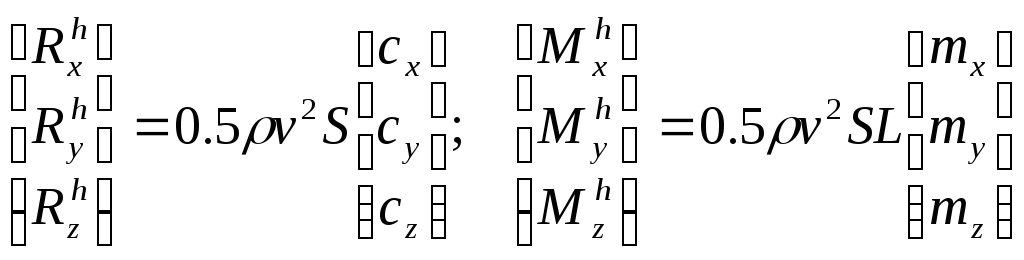 .
(3.4)
.
(3.4)
где![]() -скорость
потока жидкости, обтекающей корпус МПО,
-скорость
потока жидкости, обтекающей корпус МПО,![]() характерные
площадь и длина МПО,
характерные
площадь и длина МПО,![]() -
безразмерные характеристики или
коэффициенты продольной, нормальной
или поперечной гидродинамических сил;
-
безразмерные характеристики или
коэффициенты продольной, нормальной
или поперечной гидродинамических сил;![]() -
безразмерные характеристики
гидродинамических моментов крена,
рыскания и дифферента.
-
безразмерные характеристики
гидродинамических моментов крена,
рыскания и дифферента.
Зачастую принимают
![]() .
.![]() -
объемное водоизмещение ОМТ
(ПА).
-
объемное водоизмещение ОМТ
(ПА).
Величины коэффициентов зависят от
условий обтекания, формы корпуса и т.д.
Их определяют с помощью упрощенных
соотношений (формул Прандтля, например)
или путем модельных испытаний в опытовых
бассейнах и аэродинамических трубах.
Для этого в определенном масштабе строят
модели МПО, располагают их в динамометрическом
подвесе и проводят с заданной скоростью
![]() в воде или обдувают воздухом в
аэродинамических трубах. При этом
фиксируют силы и моменты
в воде или обдувают воздухом в
аэродинамических трубах. При этом
фиксируют силы и моменты![]() ,
действующие на модель МПО, а затем
рассчитывают характеристики
гидродинамических сил и моментов по
формулам
,
действующие на модель МПО, а затем
рассчитывают характеристики
гидродинамических сил и моментов по
формулам
![]() ,
(3.5)
,
(3.5)
где
![]() -
скоростной напор в бассейне или трубе;
-
скоростной напор в бассейне или трубе;![]() характерные
площадь и длина модели.
характерные
площадь и длина модели.
Необходимыми условиями переноса на реальный МПО экспериментальных данных, полученных на модели, является условие геометрического и динамического подобия.
Для динамического подобия требуется равенство чисел Рейнольдса для модели и натурного объекта
![]() .
.
Коэффициенты гидродинамических сил зависят от ориентации корпуса, условий обтекания, угловой скорости изменения положения МПО относительно потока
![]()
Примеры выражений для гидродинамических сил и моментов на корпусе при малых углах атаки и дрейфа
Проекции гидродинамических сил и моментов, действующих на корпусе ОМТ, определяются по следующим формулам:
 (3.6)
(3.6)
где
![]() ;
;
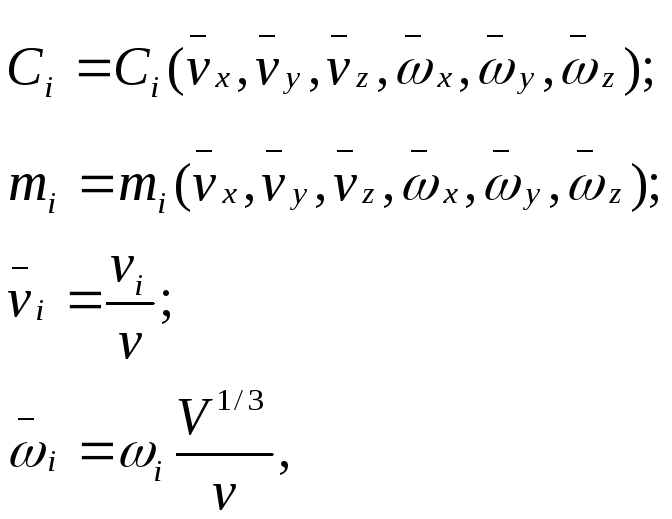
где i = x, y, z;