

§ 4. Проекция силы на ось и плоскость.
Аналитический способ сложения сил
Проекцией силы на ось называется алгебраическая величина, равная произведению модуля силы на косинус угла между силой и положительным направлением оси ( рис. 11).
Fx = Fcos , Qx = Qcos1 = – Qcos , Px = 0. (4)
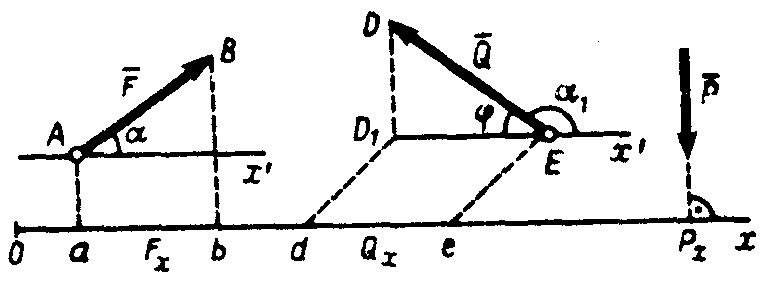
Рис. 11
Проекцией
силы
![]() на плоскость Oxy называется вектор
на плоскость Oxy называется вектор![]() ,
заключенный между проекциями начала и
конца силы
,
заключенный между проекциями начала и
конца силы ![]() на эту плоскость (рис. 12).
на эту плоскость (рис. 12).
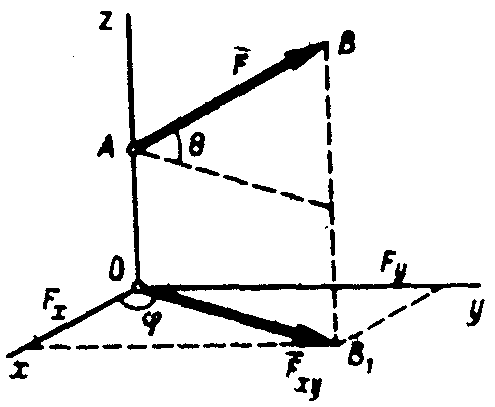
Рис. 12
В некоторых случаях для нахождения проекции силы на ось удобнее найти сначала ее проекцию на плоскость, в которой эта ось лежит, а затем найденную проекцию на плоскость спроектировать на данную ось (рис. 12):
Fx = Fxycos = Fcoscos , Fy = Fxysin = Fcossin . (5)
Силу
![]() можно построить, если известны модуль
F этой силы, углы,
,
,
которые сила образует с координатными
осями и координаты x, y, z точки приложения.
можно построить, если известны модуль
F этой силы, углы,
,
,
которые сила образует с координатными
осями и координаты x, y, z точки приложения.
Для решения задач механики удобнее задавать силу ее проекциями Fx = X , Fy = Y , Fz = Z на координатные оси. Зная проекции, можно определить модуль силы и углы, которые она образует с координатными осями по формулам
![]() ,
,
cos = X / F , cos = Y / F , cos = Z / F . (6)
Если
![]() есть главный вектор системы сил
есть главный вектор системы сил
![]() ,
,![]() ,
,![]() , …,
, …,![]() ,
т.е.
,
т.е.![]() ,
то проекциями вектора
,
то проекциями вектора![]() на оси координат будут:
на оси координат будут:
![]() ,
,
![]() ,
,
![]()
Зная Rx, Ry, Rz, по формулам (6) находим модуль главного вектора и его направляющие косинусы:
![]() ,
,
cos = Rx / R , cos = Ry / R , cos = Rz / R . (7)
Формулы (7) позволяют решить задачу о сложении сил аналитически.
Для сил, расположенных в одной плоскости, соответствующие формулы принимают вид:
![]() ,
,
![]() ,
,
![]() ,
cos = Rx / R
, cos = Ry / R
. (8)
,
cos = Rx / R
, cos = Ry / R
. (8)
Если силы заданы их модулями и углами с осями, то для применения аналитического метода сложения надо предварительно вычислить проекции этих сил на координатные оси.
Задача 1. Найти сумму трех лежащих в одной плоскости сил (рис. 13, а ), если дано: F = 17,32 Н, T = 10 Н, P = 24 , = 300, = 600.
Решение
Вычисляем проекции заданных сил на координатные оси:
Fx = Fcos = 17,32·0,866 = 15 Н, Tx = – Tcos = – 10·0,5 = – 5 Н, Px = 0,
Fy = – Fsin = 17,32·0,5 = – 8,66 Н, Ty = – Tsin = 10·0,866 = 8,66 Н,
Py = – P = –24 Н.
Тогда по формулам (8)
Rx = 15 – 5 = 10 Н , Ry = – 8,66 + 8,66 – 24 = – 24 Н .
Следовательно
![]() Н
; cos = 5 / 13
, cos = – 12 / 13
.
Н
; cos = 5 / 13
, cos = – 12 / 13
.
Окончательно R = 26 Н, = 67020, = 157020.
Для решения задачи геометрическим
методом выберем соответствующий масштаб
(например, в 1см – 10 Н) и построим
из сил
![]() ,
,![]() ,
,![]() ,
силовой многоугольник (рис. 13, б).
Его замыкающая ad определяет в данном
масштабе модуль и направление
,
силовой многоугольник (рис. 13, б).
Его замыкающая ad определяет в данном
масштабе модуль и направление![]() .
Если, например, при измерении получим
ad ≈ 2,5 см, то R ≈ 25 Н с
погрешностью по отношению к точному
решению около 4 %.
.
Если, например, при измерении получим
ad ≈ 2,5 см, то R ≈ 25 Н с
погрешностью по отношению к точному
решению около 4 %.

Рис. 13
§5. Равновесие системы сходящихся сил
Для равновесия системы сходящихся сил необходимо и достаточно, чтобы равнодействующая, а следовательно, и главный вектор этих сил были равны нулю. Условия, которым при этом должны удовлетворять силы, можно выразить в геометрической или аналитической форме.
1. Геометрическое условие равновесия. Для равновесия системы сходящихся сил необходимо и достаточно, чтобы силовой многоугольник, построенный из этих сил, был замкнутым.
2. Аналитические условия равновесия. Модуль главного вектора системы сил определяется первой формулой (7):
![]() .
.
Так как под корнем стоит сумма положительных слагаемых, то R обратится в нуль только тогда, когда одновременно Rx = 0, Ry = 0, Rz = 0, т.е. когда действующие на тело силы будут удовлетворять равенствам
![]() ,
,
![]() ,
,![]() .
(9)
.
(9)
Равенства (9) выражают условия равновесия в аналитической форме: для равновесия пространственной системы сходящихся сил необходимо и достаточно, чтобы суммы проекций этих сил на координатные оси были равны нулю.
Если сходящиеся силы лежат в одной плоскости, то они образуют плоскую систему сходящихся сил. В этом случае получим только два условия равновесия:
![]() ,
,
![]() .
(10)
.
(10)
3. Теорема о трех силах. Если твердое тело находится в равновесии под действием трех непараллельных сил, лежащих в одной плоскости, то линии действия сил пересекаются в одной точке.
Для
доказательства теоремы сначала рассмотрим
две силы, например
![]() и
и![]() .
Линии действия этих сил пересекаются
в некоторой точке А (рис. 14). Заменим
их равнодействующей
.
Линии действия этих сил пересекаются
в некоторой точке А (рис. 14). Заменим
их равнодействующей![]() .
Тогда на тело будут действовать две
силы: сила
.
Тогда на тело будут действовать две
силы: сила![]() и сила
и сила![]() ,
приложенная в какой-то точке В тела. Так
как тело находится в равновесии, то
согласно первой аксиоме, силы
,
приложенная в какой-то точке В тела. Так
как тело находится в равновесии, то
согласно первой аксиоме, силы![]() и
и![]() направлены вдоль прямой АВ. Следовательно,
линия действия силы
направлены вдоль прямой АВ. Следовательно,
линия действия силы![]() тоже проходит через точку А, что и
требовалось доказать.
тоже проходит через точку А, что и
требовалось доказать.
Пример.
Рассмотрим брус АВ, закрепленный в точке
А шарниром и опирающийся на выступ D
(рис. 15).На
этот брус действуют три силы: сила
тяжести
![]() ,
реакция
,
реакция![]() выступа и реакция
выступа и реакция![]() шарнира. Так как брус находится в
равновесии, то линии действия сил должны
пересекаться в одной точке. Линии
действия сил
шарнира. Так как брус находится в
равновесии, то линии действия сил должны
пересекаться в одной точке. Линии
действия сил![]() и
и![]() известны и они пересекаются в точке К.
Следовательно, линия действия реакции
известны и они пересекаются в точке К.
Следовательно, линия действия реакции![]() тоже должна пройти через точку К, т. е.
должна быть направлена вдоль прямой
АК.
тоже должна пройти через точку К, т. е.
должна быть направлена вдоль прямой
АК.

Рис. 14 Рис. 15
Задача
2. Груз весом Р лежит на гладкой наклонной
плоскости с углом наклона
![]() (рис. 16, а).
Определить значение горизонтальной
силы
(рис. 16, а).
Определить значение горизонтальной
силы
![]() ,
которую надо приложить к грузу, чтобы
удержать его в равновесии, и найти, чему
при этом равна сила давления
,
которую надо приложить к грузу, чтобы
удержать его в равновесии, и найти, чему
при этом равна сила давления![]() груза на плоскость.
груза на плоскость.
Решение.
Искомые силы действуют на разные тела:
сила
![]() на груз, сила
на груз, сила![]() –
на плоскость. Для решения задачи вместо
силы
–
на плоскость. Для решения задачи вместо
силы
![]() будем искать реакцию плоскости
будем искать реакцию плоскости![]() .
.![]() ,
Q = N.
Тогда заданная сила
,
Q = N.
Тогда заданная сила
![]() и искомые силы
и искомые силы![]() и
и![]() будут действовать на одно и то же тело
на груз. Рассмотрим равновесие груза.
будут действовать на одно и то же тело
на груз. Рассмотрим равновесие груза.
Геометрический
способ. При равновесии треугольник,
построенный из сил
![]() ,
,![]() и
и![]() ,
должен быть замкнутым. Построение
треугольника начнем с заданной силы.
От произвольной точкиa
в выбранном масштабе откладываем силу
,
должен быть замкнутым. Построение
треугольника начнем с заданной силы.
От произвольной точкиa
в выбранном масштабе откладываем силу
![]() (рис. 16, б).
Через начало и конец этой силы проводим
прямые, параллельные направлениям сил
(рис. 16, б).
Через начало и конец этой силы проводим
прямые, параллельные направлениям сил
![]() и
и![]() .
Точка пересечения этих прямых дает
третью вершинуc
замкнутого силового треугольника abc,
в котором стороны bc
и ac
равны в выбранном масштабе силам
.
Точка пересечения этих прямых дает
третью вершинуc
замкнутого силового треугольника abc,
в котором стороны bc
и ac
равны в выбранном масштабе силам
![]() и
и![]() .
Направление сил определяется правилом
стрелок: так как равнодействующая равна
нулю, то при обходе треугольника острия
стрелок нигде не должны встречаться в
одной точке. Модули искомых сил можно
найти из треугольникаabc
путем численного расчета (в этом случае
соблюдать масштаб при изображении сил
не надо). Замечая, что bac = 900,
abc =
получим F = Ptg ,
N = P / cos
(F / P = tg ,
P / N = cos).
.
Направление сил определяется правилом
стрелок: так как равнодействующая равна
нулю, то при обходе треугольника острия
стрелок нигде не должны встречаться в
одной точке. Модули искомых сил можно
найти из треугольникаabc
путем численного расчета (в этом случае
соблюдать масштаб при изображении сил
не надо). Замечая, что bac = 900,
abc =
получим F = Ptg ,
N = P / cos
(F / P = tg ,
P / N = cos).

Рис. 16
Аналитический способ. Так как система сходящихся сил является плоской, то для нее надо составить два условия равновесия (10)
![]() ,
,
![]() .
.
Для
этого сначала проводим координатные
оси. Затем вычисляем проекции сил
![]() ,
,![]() и
и![]() на осиx
и y
и составляем уравнения, получим:
на осиx
и y
и составляем уравнения, получим:
![]() ,
,
![]() .
.
Решая эти уравнения, найдем:
![]() ,
,
![]() .
.