

Image_slides / part2_local
.pdfПризнаки изображений
Признаки
Глобальные Локальные
Описывают картинку целиком:
−средняя яркость;
−среднее значение по красному каналу;
−…
Обычно, вычисляются по всем пикселям изображения
Описывают часть картинки:
−средняя яркость верхней левой четверти;
−среднее значение по красному каналу в окрестности центра изображения;
−…
Сегментация, поиск точек интереса, построение признаков по окрестностям точек интереса
2 © Copyright 2012 Hewlett-Packard Development Company, L.P. The information contained herein is subject to change without notice.
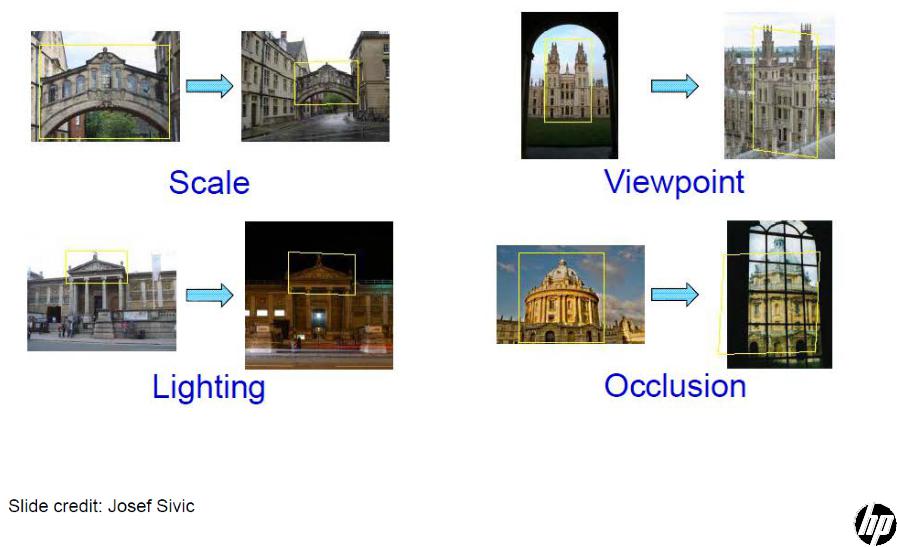
Когда глобальные признаки не работают?
3 © Copyright 2012 Hewlett-Packard Development Company, L.P. The information contained herein is subject to change without notice.
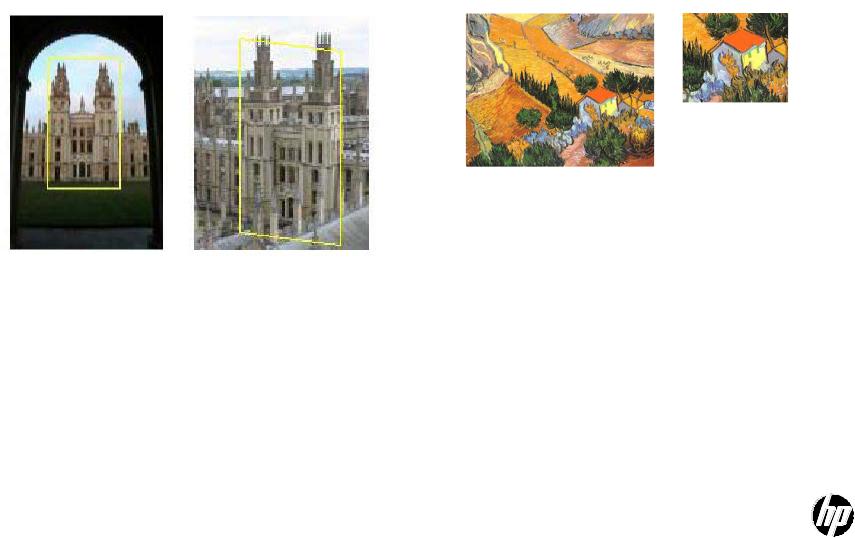
Решение: локальные признаки
•Хотя глобальные признаки отличаются, можно найти сопоставимые фрагменты изображений
•Как выбирать фрагменты?
•Как описывать фрагменты?
4 © Copyright 2012 Hewlett-Packard Development Company, L.P. The information contained herein is subject to change without notice.
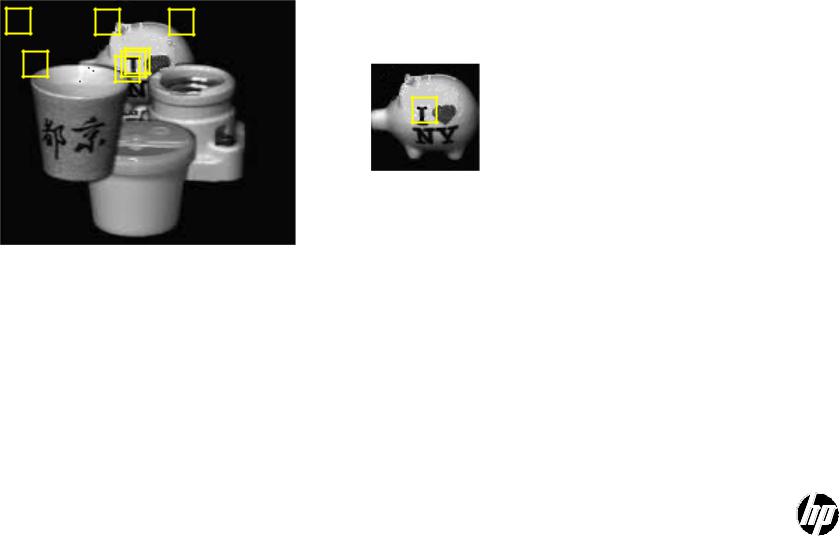
Как сопоставлять фрагменты?
1.Сканирование (scanning)
Полный перебор (точно не пропустим пару сопоставимых фрагментов) Полный перебор (медленно)
Слишком много пар
5 © Copyright 2012 Hewlett-Packard Development Company, L.P. The information contained herein is subject to change without notice.
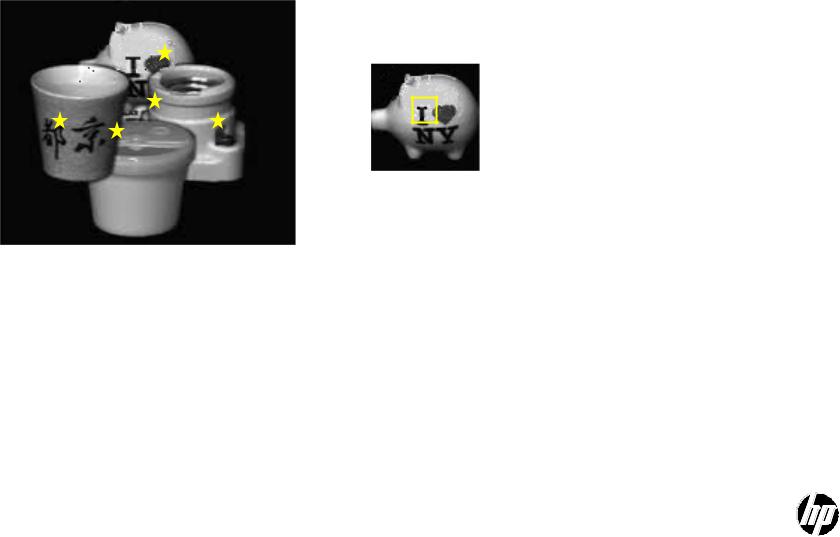
Как сопоставлять фрагменты?
 Ключевые точки Точки интереса Точки внимания Особые точки Точечные особенности
Ключевые точки Точки интереса Точки внимания Особые точки Точечные особенности
“salient”
“keypoints”
“representative”
1.Выборочное сравнение фрагментов (sparse matching)
Быстрее: меньше сравнений Изолированные фрагменты (нет пересекающихся пар)
Нет гарантии, что всегда будут найдены все пары Как искать «ключевые» точки???
6 © Copyright 2012 Hewlett-Packard Development Company, L.P. The information contained herein is subject to change without notice.
An introductory example:
C.Harris, M.Stephens. “A Combined Corner and Edge Detector”. 1988
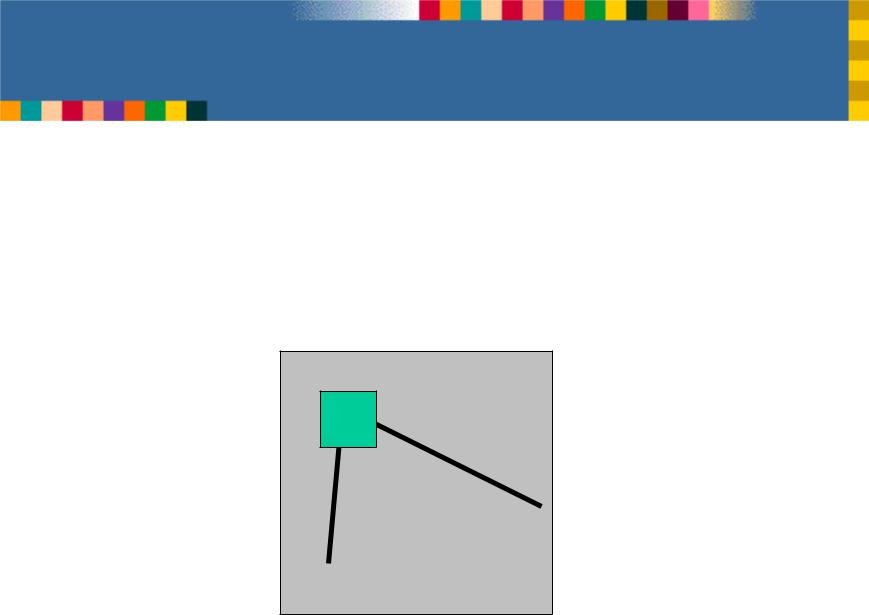
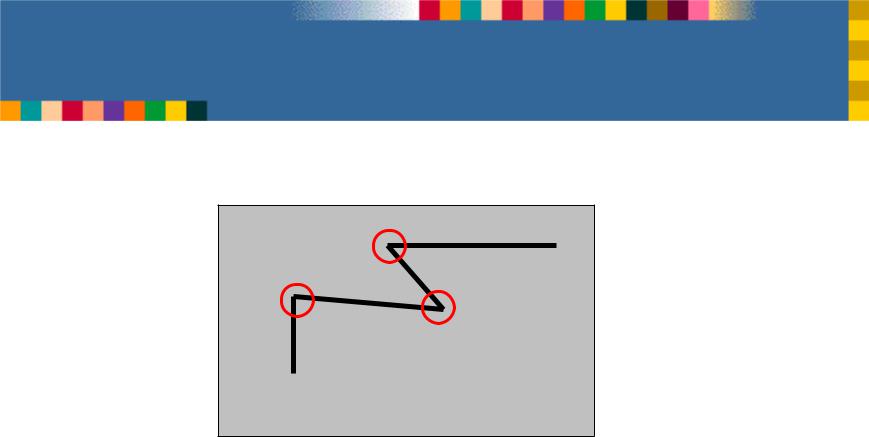
The Basic Idea
•We should easily recognize the point by looking through a small window
•Shifting a window in any direction should give a large change in intensity
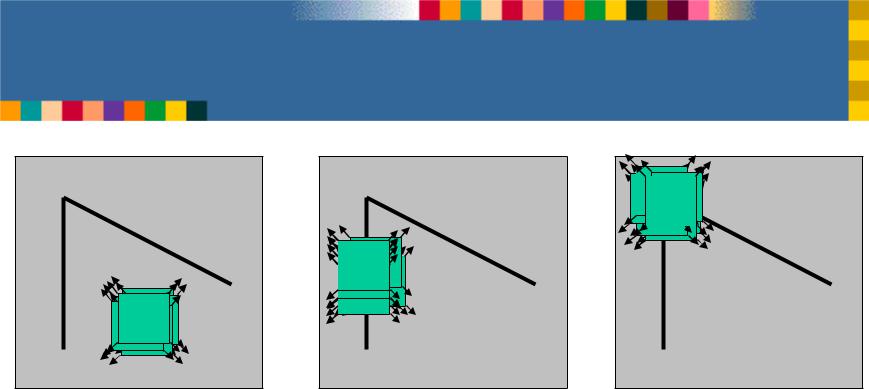
Basic Idea (2)
“flat” region: |
“edge”: |
“corner”: |
no change in |
no change along |
significant change |
all directions |
the edge direction |
in all directions |
Mathematics
Change of intensityHarrisfor the Detector:shift [u,v]:
E u , v =∑Mathematicsw x , y [I x u , y v −I x , y ]2
x , y
Window |
Shifted |
Intensity |
|
function |
intensity |
||
|
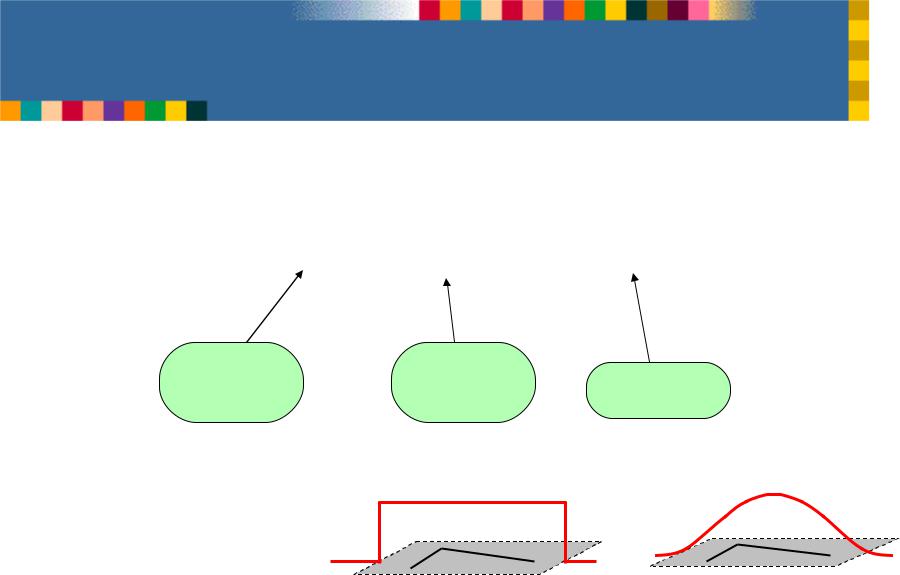
Window function w(x,y) = |
or |
1 in window, 0 outside |
Gaussian |

Mathematics
For small shifts [u,v] we have a bilinear approximation:
E u , v [u v ]M [uv ]
where M is a 2×2 matrix computed from image derivatives:
M =∑ w x , y |
I 2x |
I x I y |
|
[I x I y |
2 |
] |
|
x , y |
I y |