

Способы регулирования частоты вращения асинхронных двигателей
Существенным недостатком асинхронных электродвигателей является относительно сложное регулирование частоты их вращения.
Возможные способы регулирования частоты вращения асинхронных электродвигателей можно установить в результате анализа выражения, записанного относительно частоты вращения ротора двигателя: n2= 60f1(1 ‑s)/p. Анализ формулы показывает, что частоту вращения асинхронного двигателя можно изменить, меняя скольжение ротораs, число пар полюсоврдвигателя или частотуf1питающего напряжения.
Регулирование частоты вращения изменением скольжения возможно изменением подводимого к обмотке статора напряжения или изменением активного сопротивления в цепи ротора.
Регулирование частоты вращения изменением активного сопротивлениявозможно только для асинхронных двигателей с фазным ротором, в обмотку которого (посредством контактных колец) включается добавочное регулировочное сопротивление по такой же схеме, как и при пуске двигателя. Однако пусковое сопротивление не годится для регулирования скорости, так как оно не рассчитано на длительную работу. Регулировочное сопротивление должно выдерживать токи, сравнимые с пусковыми, в течение длительного времени.
При увеличении активного сопротивления цепи ротора значение критического скольжения ротора двигателя sкв соответствии с приведенной ранее формулой увеличивается.
Включая различные добавочные сопротивления можно получить семейство механических характеристик двигателя, примерно таких, какие показаны на рис. 11, из которых следует, что с увеличением активного сопротивления в цепи ротора при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, увеличенному сопротивлению. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование при этом способе возможно в широком диапазоне скольжений, однако при уменьшении частоты нарушается жесткость механической характеристики и увеличиваются электрические потери.
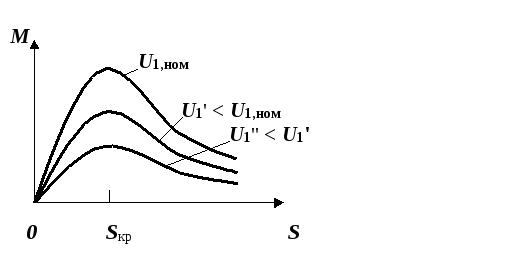
Регулирование частоты вращения изменением питающего напряжениявозможно за счет того, что критическое значение моментаМк, а следовательно, величинаМ(s) при любом скольжении пропорциональна квадрату питающего напряженияU12. Из приведенных на рис.12 кривых явно видно, что при постоянном моменте нагрузки на валу электродвигателя рабочая точка смещается с одной механической характеристики на другую, соответствующую новому, уменьшенному напряжениюU1. Происходит увеличение скольжения ротора, а следовательно, уменьшение частоты вращения ротора асинхронного двигателя. Регулирование асинхронного двигателя при этом способе возможно только в незначительном диапазоне скольжений, который ограничивается критическими моментом и скольжением ротора.
Следует отметить, что при уменьшении напряжения происходит резкое снижение критического момента двигателя, пропорционально квадрату напряжения и, следовательно, резкое уменьшение перегрузочной способности двигателя по кратности критического момента, что ограничивает область применения описанного способа.
Рис. 12
Частоту вращения асинхронного двигателя можно регулировать также изменением частоты питающего тока, но этот способ для мощных двигателей практически не применяют ввиду отсутствия простых и экономичных устройств, регулирующих частоту тока в мощных цепях. В то же время, разработка и промышленное освоение мощных и дешевых управляемых полупроводниковых приборов (диоды, тиристоры) позволяет реализовывать простые и надежные преобразователи частоты и напряжения малой и средней мощности, с помощью которых можно легко регулировать частоту вращения асинхронных электродвигателей с короткозамкнутым ротором, что значительно упрощает привод различных механизмов, при этом часто отпадает необходимость в редукторах, коробках скоростей, трансмиссиях.