

курсач тмм
.docxМинистерство транспорта Российской Федерации
Федеральное агентство железнодорожного транспорта
ГОУ ВПО «Дальневосточный государственный
университет путей сообщения»
Институт тяги подвижного состава
Кафедра «детали машин»
Курсовая работа
По дисциплине «Теория механизмов и машин»
На тему: «Исследование рычажного механизма»
Студент: Ким Ун Нам
Специальность: «Подвижной состав железных дорог»
Преподаватель: Поспелов Александр Иванович
Южно-Сахалинск
2014
Введение
Теория механизмов и машин (ТММ) является основой проектирования работоспособных технических объектов. Основные задачи ТММ – это анализ и синтез механизмов с заданными параметрами, и проектирование механизмов (определение его параметров), удовлетворяющих заданным требованиям. Результаты решения задач ТММ являются исходными данными для более детального проектирования объектов методами деталей машин, сопротивления материалов и специальных дисциплин.
Цель работы
Целью выполнения данной курсовой работы является закрепление теоретических сведений, полученных при изучении «Теории механизмов и машин», приобретение практических навыков конструирования рычажных механизмов.
В данной работе рассматривается механизм состоящий из трех звеньев и трех кинематических пар.
Исследование рычажного механизма включает три этапа:
-
Структурный анализ механизма.
-
Кинематический анализ.
-
Кинетостатический анализ.

|
Исходные данные |
|
|
параметры |
значения |
|
ℓAB, мм |
60 |
|
ℓBC, мм |
150 |
|
ω1, рад/с |
10 |
|
φ, градусы |
150 |
|
ε1, рад/с |
0 |
|
m1, кг |
4 |
|
m2, кг |
3 |
|
m3, кг |
0,15 |
|
F, H |
30 |
1 Структурный анализ механизма
Структурная
схема механизма изображена на рисунке
1

Рисунок 1 – структурная схема механизма
Степень подвижности механизма определяется по формуле
Чебышева [1]

Где n – число подвижных звеньев механизма;
p1 – число одноподвижных кинематических пар;
p2– число двухподвижных кинематических пар.

Данный механизм имеет первую степень подвижности.
Первичный механизм изображен на рисунке 2
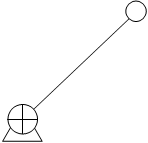
Рисунок 2 - первичный механизм I кл
Группа Ассура изображена на рисунке 3


Рисунок 3 - группа АссураIIкл, 1 вида
Механизм изображенный на рисунке 1 II класса.
2 Кинематическое исследование механизма
Существует три метода кинетического анализа механизма:
-
Аналитический
-
Метод диаграмм
-
Метод планов.
2.1 План скоростей и его свойства
Планом скоростей механизма называют совокупность планов скоростей отдельных звеньев механизма имеющих общий полюс.
Скорость точки Bопределяется из уравнения
 ,
,
Где
 –
вектор скорости точки A;
–
вектор скорости точки A;
 – вектор скорости
точки В относительно точки А.
– вектор скорости
точки В относительно точки А.
Скорость точки А равна нулю.
Скорость точки В относительно точки А определяется из уравнения
 *
*

Скорость точки В относительно точки А равна 0,6 м/с.

Масштабный коэффициент
плана скоростей определяется из уравнения
 ,
,
Где
 – длинна отрезка на чертеже.
– длинна отрезка на чертеже.
Масштабный коэффициент плана скоростей равен 0,005(м⁄с)/мм.
Скорость точки С определяется из уравнения

Где
 – скорость точки
С относительно точки В.
– скорость точки
С относительно точки В.
Скорость точки С относительно точки В определяется из уравнения

Так
как нам неизвестна угловая скорость
 ,
составляется система уравнений.
,
составляется система уравнений.
 ,
,
Где
 –
скорость точки находящейся на стойке;
–
скорость точки находящейся на стойке;
 – скорость точки С
относительно точки С4.
– скорость точки С
относительно точки С4.
Свойства плана скоростей:
-
Вектора абсолютных скоростей точек звеньев механизма выходит из точки, а относительные соединяют концы абсолютных.
-
По плану скорости можно определить направление и величину абсолютной скорости звена механизма.


Скорость точки С равна 0,63 м/с
-
По плану скорости можно определить направление и величину угловой скорости любого звена механизма.
Угловая скорость
 второго звена определяется из уравнения
второго звена определяется из уравнения

Отрезок
BCна плане скоростей
является скоростью

Угловая
скорость
 второго звена равна 2,2 1/с
второго звена равна 2,2 1/с
-
Свойство подобия. Фигура на плане механизма подобна фигуре на плане скоростей.

Длина
отрезка
 определяется из уравнения
определяется из уравнения

Скорость точки s1определяется из уравнения


Скорость точки s1равна 0,3 м/с

Длина
отрезка
 определяется
из уравнени
определяется
из уравнени


Скорость
точки
 определяется
из уравнения
определяется
из уравнения


Скорость
точки
 равна
0,595 м/с
равна
0,595 м/с
Скорость
точки
 определяется из уравнения
определяется из уравнения


Скорость
точки равна 0,63 м/с.
равна 0,63 м/с.
2.2 План ускорений и его свойства
Планом ускорений механизма называется совокупность планов ускорений отдельных его звеньев, имеющих общий полюс.
Нормальное
ускорение
 определяется по формуле
определяется по формуле


Тангенсальное
ускорение определяется из уравнения
определяется из уравнения


Ускорение точки В определяется из уравнения

Где
 –
нормальное (центростремительное)
ускорение точки В относительно точки
А;
–
нормальное (центростремительное)
ускорение точки В относительно точки
А;
 – тангенсальное ускорение точки В
относительно точки А равное 0;
– тангенсальное ускорение точки В
относительно точки А равное 0;
 – ускорение точки А равное 0, так как
она неподвижна.
– ускорение точки А равное 0, так как
она неподвижна.

Ускорение
 равно
6 м/с2
равно
6 м/с2
Масштабный
коэффициент
 определяется из уравнения
определяется из уравнения


Масштабный
коэффициент
 равен 0,05 (м/с2)/мм
равен 0,05 (м/с2)/мм
Нормальное
ускорение
 определяется
из уравнения
определяется
из уравнения


Величину
отрезка
 определим
из уравнения
определим
из уравнения

Ускорение точки С определяется из системы уравнений
Где
 –нормальное (центростремительное)
ускорение точки С относительно точки
В;
–нормальное (центростремительное)
ускорение точки С относительно точки
В;
 -
тангенсальное ускорение точки С
относительно точки В.
-
тангенсальное ускорение точки С
относительно точки В.
 –
ускорение точки С4 равное 0;
–
ускорение точки С4 равное 0;
 – ускорение точки С относительно С4.
– ускорение точки С относительно С4.
Ускорение
 определяется
из уравнения
определяется
из уравнения


Ускорение точки С равно 2,1 м/с2
Свойства плана ускорений:
-
Вектора абсолютных ускорений точек звеньев механизма выходят из полюса, а относительные соединяют концы абсолютных.
-
По плану ускорений можно определить направление и величину ускорения в любой точке звена механизма.
-
По плану ускорений можно определить направление и величину углового ускорения любого звена механизма.


-
Свойство подобия. Фигура на плане механизма подобна фигуре на плане ускорений.
Ускорение центра масс первого, второго
и третьего звеньев определяется из
уравнения



3.
Кинето-статический расчет механизма.
Вес узлов определяется из уравнения

где m - масса узла;
g - ускорение свободного падения.
Вес G узлов 1, 2 и 3 определяются из уравнений



Сила
инерции
 определяется из уравнения
определяется из уравнения

где m - масса звена;
 - ускорение центра масс.
- ускорение центра масс.
Сила инерции узлов 1, 2 и 3 определяются из уравнений



Момент
сил инерции Mин
определяется из уравнения

где
 - момент инерции;
- момент инерции;
 - угловое ускорение.
- угловое ускорение.
Моменты сил инерции звеньев 1 и 2 определяются из уравнений

так
как
 =0
=0

Момент
инерции
 определяется из уравнения
определяется из уравнения

Момент инерции звена 2 определяется из уравнения

Величина h1 определяется из уравнения


Уравнение равновесия


Из уравнения равновесия определяем


4. Рычаг Жуковского
Уравнение равновесия


Из
уравнения равновесия определяем


5. Список литературы
1. Теория механизмов и машин: Учеб. Для вузов. – 6-е изд., стереотипное. – М.: ИД Альянс, 2011. – 640с.
2. Курсовое проектирование по теории механизмов и машин: Учеб. Пособие для машиностроит. спец. вузов/ Под ред. К.В. Фролова. – М.: высш. шк., 1986. – 295 с.: ил.

Содержание