

2.3.1. Маршрутная фототриангуляция
Если модель строится в пределах оного маршрута, то такую фототриангуляцию называют маршрутной (одномаршрутной).
Существуют следующие основные способы фототриангуляции:
последовательное построение по стереопарам частично зависимых моделей, соединение их в общую модель и внешнее ориентирование ее по опорным точкам (способ частично зависимых моделей);
построение по стереопарам независимых моделей, соединение их в общую модель и внешнее ориентирование ее по опорным точкам (способ независимых моделей);
построение общей модели по всем снимкам маршрута, уравнивание ее и внешнее ориентирование (способ связок).
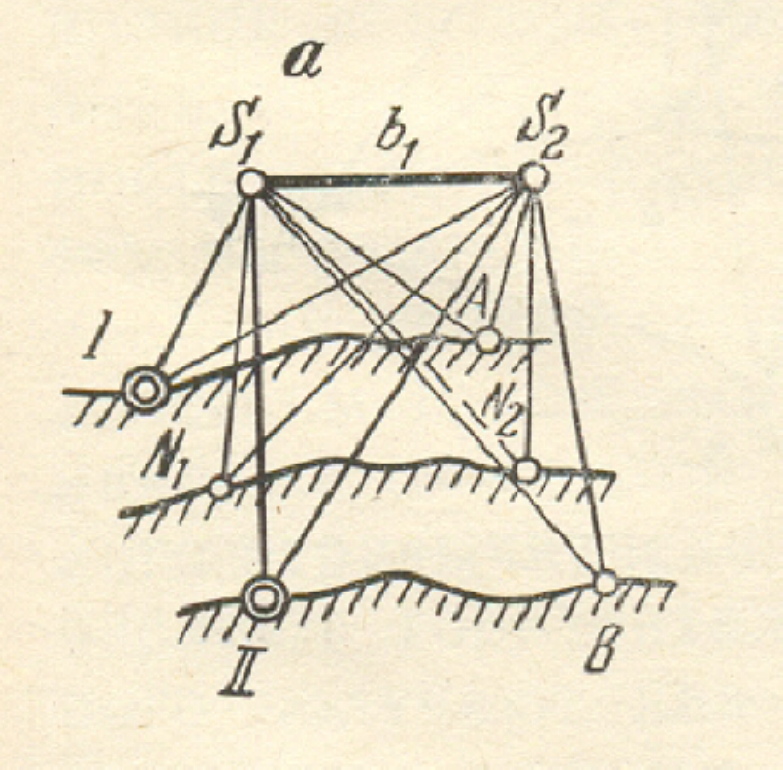 рис.3
рис.3
Способ частично зависимых моделей состоит в следующем. При построении первого звена произвольно выбирают элементы внешнего ориентирования левого снимка первой стереопары. Определяют элементы взаимного ориентирования в системе левого снимка. Длину базиса проектирования выбирают произвольно. Вычисляют дирекционный угол и угол наклона базиса, а также элементы внешнего ориентирования второго снимка, которые определяют по элементам внешнего ориентирования левого снимка и элементам взаимного ориентирования. Зная координаты соответственных точек стереопары и элементы внешнего ориентирования снимков, решением прямых фотограмметрических засечек определяют координаты точек модели.
Аналогично создают вторую модель при произвольно выбранном базисе проектирования. В качестве элементов внешнего ориентирования левого снимка второй стереопары принимают вычисленные ранее элементы внешнего ориентирования правого снимка первой стереопары. Таким образом, вторая модель создается в той же системе координат, что принята для первой модели. Для третьей и всех, последующих моделей в маршруте в качестве элементов внешнего ориентирования левых снимков принимают элементы внешнего ориентирования правых снимков предыдущих моделей. Таким образом, вторая и все последующие модели маршрута создаются в единой системе пространственных фотограмметрических координат, которая была принята при построении первой модели.
Следовательно, все построенные модели в маршруте являются частично связанными (зависимыми) друг с другом, причем масштабы отдельных моделей неодинаковы. Последующая модель приводится к масштабу предыдущей по связующим точкам. Масштабный коэффициент определяют обычно по центральной N2 и двум боковым А и В связующим точкам (см. рис.3). В качестве вероятнейшего значения масштабного коэффициента берется среднее весовое значение.
Аналогично строят все последующие модели в аэрофотосъемочном маршруте. Полученную таким образом общую модель геодезически ориентируют по опорным точкам, устраняя одновременно ее деформацию, возникающую вследствие погрешностей снимков, их измерений и соединения отдельных моделей в общую. Кроме того, вводят поправки за кривизну Земли, если сеть фототриангуляции имеет большую протяженность.
Способ независимых моделей основан на построении по стереопарам отдельных моделей и последующем соединении их в общую модель.
Каждая отдельная модель строится независимо от других в своей пространственной фотограмметрической системе координат, ось абсцисс которой Х совмещают с базисом фотографирования, а плоскость XZ – с главной базисной плоскостью левого снимка. Измеряют на стереокомпараторе координаты всех точек стереопары, включаемые в фототриангуляционную сеть.
Определяют элементы взаимного ориентирования в базисной системе. Вычисляют координаты точек местности в системе координат модели.
Созданные таким образом отдельные независимые модели соединяют затем в общую модель при помощи связующих точек, определяя элементы ориентирования последующей модели относительно предыдущей. На основании полученных элементов ориентирования перевычисляют координаты точек последующей модели в систему координат первой модели. Таким образом, общая модель строится в единой системе координат, принятой при построении первого звена.
Общая модель ориентируется по геодезическим опорным точкам относительно геодезической системы координат.
Особенностью способа независимых моделей является то, что в процессе построения моделей не требуется знание элементов внешнего ориентирования снимков.
Способ связок отличается от первых двух способов тем, что вся сеть строится и уравнивается одновременно по всем аэрофотоснимкам маршрута.
Для каждой точки снимка, которая включается в фотограмметрическую сеть, составляют два уравнения вида:
![]()
![]() (2)
(2)
Их число соответственно будет в два раза больше числа взятых точек. Для каждой из связующих точек, находящихся в зонах тройных продольных перекрытий, можно составить шесть уравнений (по два уравнения для каждого из трех перекрывающихся снимков). С целью упрощения решения задачи обычно используют уравнения (2), приведенные к линейному виду и содержащие в качестве неизвестных поправки приближенные значения элементов внешнего ориентирования и приближенные координаты определяемых точек.
Полученная система уравнений поправок решается по методу наименьших квадратов. С этой целью от уравнений поправок переходят к нормальным уравнениям, из решения которых находят элементы внешнего ориентирования и пространственные координаты точек сети в первом приближении.
Затем используют полученные значения элементов внешнего ориентирования и координат точек сети для составления и решения уравнений поправок во втором приближении. Так же выполняют все последующие приближения до тех пор, пока разности значений неизвестных, полученных из двух последних приближений, не окажутся меньше установленных допусков.
При составлении уравнений поправок принимается, что координаты опорных геодезических точек известны с пренебрегаемо малыми погрешностями, элементы внутреннего ориентирования снимков известны с достаточной точностью, а погрешностями измерения фотокоординат точек на снимках можно пренебречь. Для ускорения и уточнения решения задачи в качестве приближенных значений элементов внешнего ориентирования используют их значения, зафиксированные в полете в результате бортовых измерений.
Способ связок характерен тем, что позволяет построить сеть пространственной фототриангуляции без определения элементов взаимного ориентирования снимков, поэтому он является наиболее перспективным для маркшейдерских съемок. Этот способ позволяет получить координаты точек сети непосредственно в пространственной условной системе геодезических координат, принятой для данного горного предприятия.
Точность маршрутной фототриангуляции. Если рассматривать общую закономерность накопления погрешности при построении свободной сети фототриангуляции в целом, то средняя квадратическая ошибка для конечной точки маршрута равна:
![]() (3)
(3)
![]() (4)
(4)
![]() (5)
(5)