

REAL / REAL
.DOCЭтап сбора и обобщения информации о воздушной обстановке: приведение информации о целях к единой системе координат.
Данные о воздушной обстановке, поступающие от одного источника, как правило, не дают полной картины о положении и характере действий целей и своих самолетов. Возможности радиолокационной станции по ведению разведки определяются не только по ее тактико-техническими характеристиками, но и зависят от занимаемой позиции радиоэлектронного противодействия противника, технического состояния аппаратуры, уровня подготовленности боевого расчета и других факторов. Поэтому полное представление о воздушной обстановки можно получить лишь в результате обобщения данных, поступающих с нескольких автоматизированных РЛС, связанных со станциями пунктов обработки информации.
Состав и форма представления данных, поступающих на пункты сбора информации, в разных системах управления могут существенно отличаться.
Необходимость пересчета координат целей возникла в связи с тем, что каждый пункт управления работает в своей собственной системе координат, связанной с подчиненным источником информации. Началу координат соответствует центр экрана индикатора. Пересчет координат позволяет совместить данные нескольких источников и на этой основе решать остальные задачи обобщения информации.
В АСУ ПВО СВ применяются несколько способов приведения данных единой системе координат. Выбор способа зависит от того, в каком звене управления применяется АСУ и какое максимальное расстояние может быть между источниками информации. При больших взаимных удаленьях источников может сказываться кривизна Земли. Оценим возникающие при этом ошибки пересчета координат целей.
Пусть в точках А и В расположены два источника информации, каждый из которых работает в прямоугольной топографической системе координат: ось Х направлена вдоль осевого меридиана зоны карты на север, ось Y - на восток, ось Н -вверх перпендикулярно поверхности земного геоида, причем начало отсчета соответствует уровню Балтийского моря. На рис.1 дуга МN представляет собой разрез земной поверхности вертикальной плоскостью, проходящей через пункты А и В.
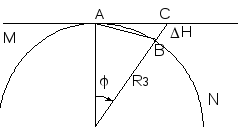
Рис. 1. К определению ошибок пересчета координат цели.
Расстояние между пунктами А и В мало по сравнению с радиусом Земли Rз, поэтому угол j является малым. Из рис.1 видно, что если вместо дуги 1, равной АВ, будет взята прямая АС касательная в точке А, то горизонтальное расстояние между точками А и В будет измерено с ошибкой
![]() = AC – АB
= Rз
tgj
- 1
= AC – АB
= Rз
tgj
- 1
Длину дуги l найдём по формуле 1 = Rзj
Разлагая tgj ряд и пренебрегая ввиду малости j членами выше третьей степени, получим
tg j = j + 1/3j3
Тогда ошибка определения горизонтального расстояния между точками А и В составит
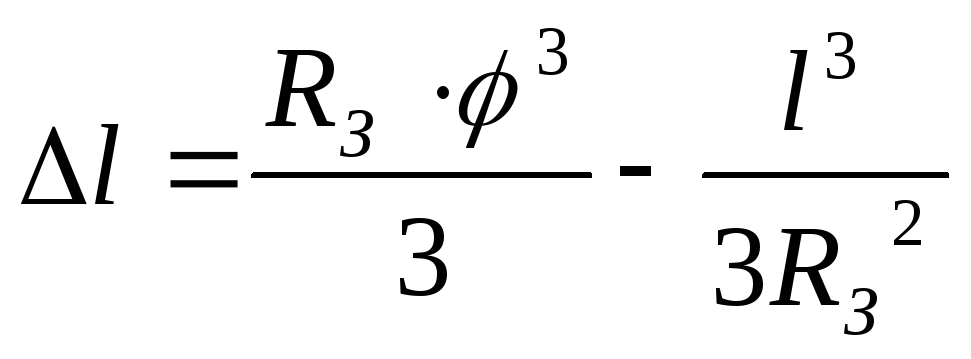 (1)
(1)
угол САВ, образованный касательной и хордой в точке А, равен 1/2j. В силу малости отрезок DН можно рассматривать как дугу радиуса l.
Тогда
![]() (2)
(2)
Результаты расчета D1 и DН представлены в таблице 1
Таблица 1
Ошибки расчета координат целей
|
l,км |
Dl, м |
DН, м |
|
20 50 100 200 500 |
0,065 1,02 8,14 65 1020 |
3,12 19,5 780 3120 19500 |
Из сравнения полученных данных можно сделать вывод, что замена сферы Земли плоскостью, касательной земной поверхности, может производиться в радиусе 200…250 км. При этом ошибка Dl не превосходит 65.. 90 м. При радиусе зоны больше 300 км из-за значительной погрешности использование систем прямоугольных координат недоступно. Ошибка в определении повышений одной точки над другой DН при отсутствии поправки на кривизну Земли значительно даже при небольших расстояниях между пунктами.
Перерасчёт
координат целей производиться в два
этапа (рис.2.).

Рис. 2. Взаимосвязь систем координат.
Предположим, источником информации о воздушной обстановке является передающий пункт (ПП), а потребителем – пункт управления.
Измеряются
координаты цели в системе координат с
центром в
точке
ПП. Как видно
из
рис.2, положение цели характеризуется
вектором дальности Dпп
![]() На пункте управления этой же цели
будет соответствовать другой вектор
Dпп(
На пункте управления этой же цели
будет соответствовать другой вектор
Dпп(![]() ),
начинающийся
из точки ПУ.
),
начинающийся
из точки ПУ.
Расстояние
ПП от ПУ характеризуется вектором
горизонтального параллакса
![]() .
Для перехода от Dпп
к Dпу можно использовать векторное
управление
.
Для перехода от Dпп
к Dпу можно использовать векторное
управление
![]()
однако предварительно необходимо найти вектор параллакса П. Это оказывается несложной задачей, если известны координаты точек ПП (Хпп, Yпп) и ПУ (Хпу, Yпу) в единой системе координат, связанной с некоторой условной точкой УТ. Ввиду того, что
![]()
можно
записать
![]()
![]()
![]() Следовательно,
Следовательно,
![]()
Полученное
векторное уравнение можно решать как
на пункте управления,
так и на пункте передачи, если при
решении известны координаты всех
трех точек (УТ, ПУ и ПП). Поскольку пункты
управления и передачи информации в
основном работают в движении, непрерывная
выдача информации в канал связи их
текущих координат является
нецелесообразной. Двухэтапное решение
задачи пересчета данных о воздушной
обстановке
в единую систему координат состоит в
том, что на первом этапе вектор
![]() пу
преобразуется в вектор
пу
преобразуется в вектор
![]() ,
а на
втором
векторе
,
а на
втором
векторе
![]() пересчитывается в искомый вектор
пересчитывается в искомый вектор
![]() пу.
В аналитической форме имеем:
пу.
В аналитической форме имеем:
![]() =
=
![]() пп
+
пп
+
![]() пп
;
пп
;
![]() пу
=
пу
=
![]() -
-
![]() пу.
пу.
Таким образом, на передающем пункте три координаты цели преобразуются по формулам:
Хц
=
ХцПП
+Хпп
; Уц
=
![]() +Упп
; Нц
= НцПП
+ Нпп
,
+Упп
; Нц
= НцПП
+ Нпп
,
а на приемном — Хцпу = Хц – Хпу , Уцпу = Уц – Упу , Нцпу = Нц – Нпу .
Прямоугольные координаты условной точки доводятся до всех пунктов управления боевым распоряжением. Текущие координаты ПП ПУ определяются с помощью аппаратуры топопривязки, устанавливаемой на объектах АСУ. Разность этих координат и есть Хпп , Упп , Нпп и Хпу , Упу , Нпу .
При обмене данными о воздушной обстановке в пределах армии или фронта для учета кривизны Земли на командные пункты и пункты управления передается номер координатной зоны условной точки в картографической системе Гаусса - Крюгера. Номера зон ПП и ПУ также учитываются в измененном алгоритме пересчета координат цели. Общий порядок решения задачи преобразования координат цели при обмене информацией между ПУ подчиненного звена СКП следующий:
-
по известным прямоугольным координатам условных точек ПУ и СКП и номерам зон карт определяется географические координаты условных точек - широта долгота и вертикаль к поверхности земного эллипсоида;
-
по географическим координатам рассчитываются коэффициенты пересчета координат цели К11…К14, К21…К24, которые учитывают взаимный разворот осей смещение центров систем координат, связанных с двумя условными точками;
-
коэффициенты пересчёта используются в формулах преобразования координат цели в единую систему координат пункта сбора данных о воздушной обстановке.
![]() =
К22ХцПП
+ К21УцПП
+ К23НцПП
+ К24; (3)
=
К22ХцПП
+ К21УцПП
+ К23НцПП
+ К24; (3)
УцПУ = К12Хц + К11 (УцПП)’ + К13(НцПП)' + К14 +d.
Здесь (УцПП)' и (НцПП)' отличаются от измеренных передающих пунктов координат УцПП и НцПП поправочными коэффициентами; d - дополнительный поправочный коэффициент.