

7.1.1. Описание балансировочного станка тмм-1м
Вал ротора 4 (рис. 7.2) установлен на подшипниках 8, укрепленных в маятниковой раме 9. В роторе с помощью болта 5, поставленного в торцовой стенке, создан постоянный дисбаланс. На каждой полуоси ротора насажены динамически отбалансированные диски 6 и 6а.
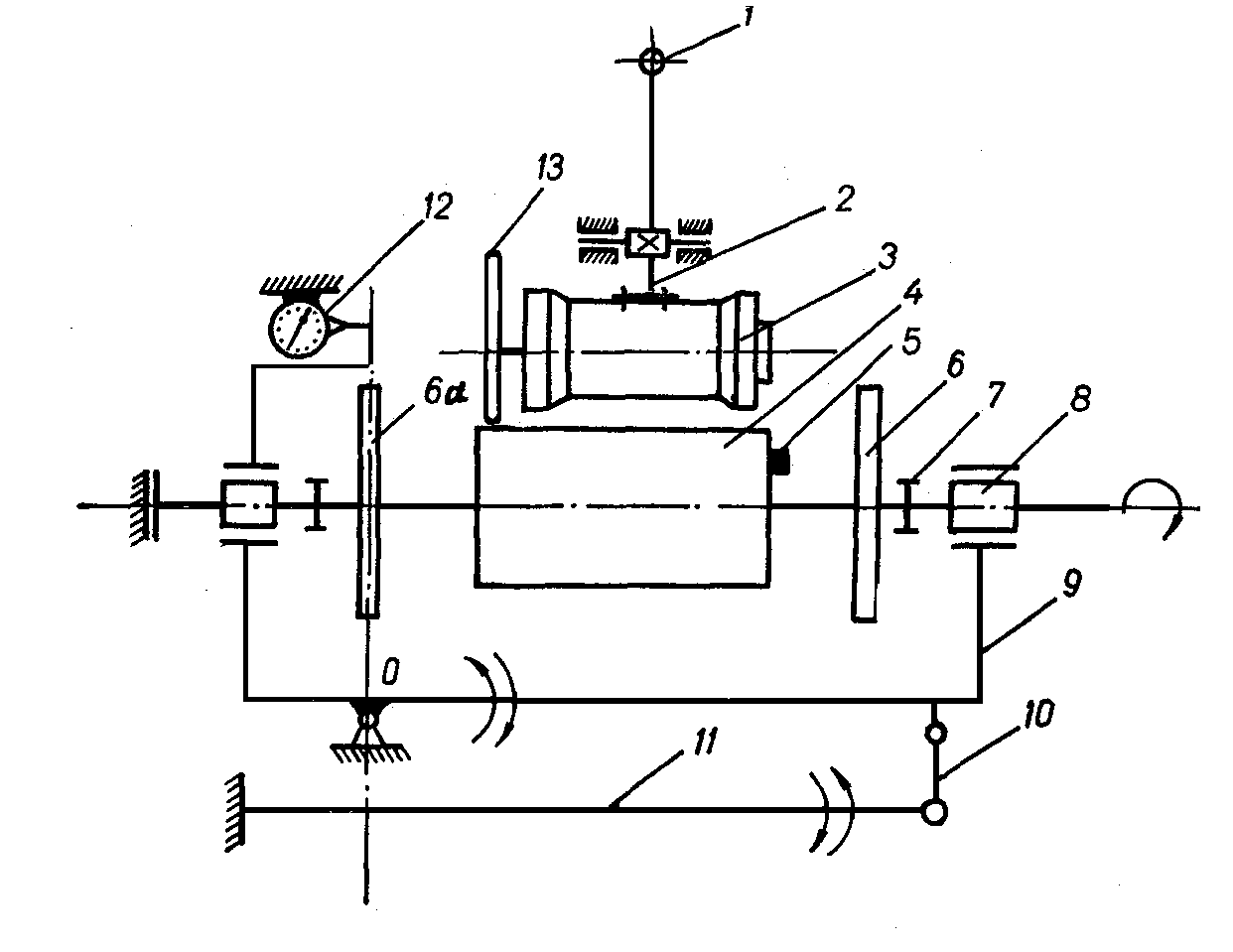
Рис. 7.2
При динамической балансировке ротора в прорезях правого диска устанавливается дополнительный груз (есть в комплекте). Диски могут вращаться относительно оси ротора. Стопорятся они при помощи винтов 7. Углы установки дисков отсчитываются по лимбу.
Разгон ротора осуществляется посредством фрикционного диска 13, насаженного на вал электродвигателя 3, который закреплен в ложе качающегося рычага 2. Другое плечо рычага заканчивается рукояткой 1, при помощи которой включают двигатель и прижимают фрикционное колесо 13 к ротору 4.
Маятниковая рама опирается на стойки (на схеме не показаны), закрепленные на станине, и может колебаться относительно горизонтальной оси опор (ось проектируется в точку О).
Пружина 11 в форме балки круглого сечения одним концом шарнирно посредством серьги 10 крепится к маятниковой раме; другой конец пружины защемлен в станине.
Амплитуда колебаний маятниковой рамы измеряется с помощью индикатора 12 часового типа с ценой деления 0,01 мм. Горизонтальность рамы достигается регулировкой опорных винтов, а контроль производится по уровню, закрепленному в маятниковой раме.
Основные параметры балансировочного станка ТММ-1м:
собственная частота колебаний рамы – 6 – 7 Гц;
точность измерения амплитуды – 0,01 мм;
цена деления угловой шкалы дисков – 2о;
цена деления радиальной шкалы дисков – 1 мм;
вес добавочных грузов – 10, 20, 30, 40 г;
электродвигатель типа МУН 1000/80, мощность – 80 Вт; напряжение питания – 220 В;
габариты станка
– 600
![]() 455
455![]() 440 мм;
440 мм;
масса станка – 56 кг. Общий вид станка показан на рис. 7.3.
Рис. 7.3
7.2. Порядок выполнения работы
Изучить устройство и ознакомиться с параметрами экспериментальной установки ТММ-1м, не включая ее в сеть.
Вычертить схему установки (см. рис. 7.2).
Подготовить установку к работе:
а) проверить настройку рамы по уровню (настраивает преподаватель);
б) диск 6 по шкале устанавливается на нуль (диск 6а постоянно установлен на нуль);
в) указатель точного отсчета индикатора 12 поворотом за накатку корпуса устанавливается на нуль;
г) во избежание значительных отклонений стрелки индикатора в начальный период разгона ротора 4 шток индикатора следует вывести из контакта с кронштейном рамы 9.
4) Нажатием на рукоятку 1 привода электродвигателя 3 производится разгон ротора 4, после чего электродвигатель выключается, шток индикатора доводится до контакта с кронштейном рамы и записывается максимальная амплитуда А1 колебаний рамы 9 при резонансных оборотах ротора. Измерение амплитуды А1 производится три раза, затем вычисляется ее среднее значение.
5) Задаются весом добавочного груза Qд и радиусом его установки rд. Вычисляется статический момент груза как произведение Qд rд. Добавочный груз Qд закрепляется в одной из прорезей диска 6 на выбранном расстоянии. Амплитуда А2 колебаний рамы измеряется три раза при резонансе и вычисляется ее среднее значение.
6) Освобождаются винты 7, крепящие диск 6, а сам он поворачивается на валу ротора до положения, соответствующего отсчету 180о, и снова закрепляется. Амплитуда А3 измеряется также три раза при резонансе и вычисляется ее среднее значение.
Результаты измерения значений амплитуды А1 – А3, вес добавочного груза Qд, радиус его установки rд и статический момент Qд rд занести в табл. 7.1.
Т а б л и ц а 7.1
Значения амплитуды колебаний ротора
|
Ампли-туда |
Измерения |
Вес добавочного груза Qд = … Н Радиус положения добавочного груза rд = … мм Qд rд = … Нмм | |||
|
первое |
второе |
третье |
среднее | ||
|
А1 А2 А3 |
|
|
|
| |
При измерении амплитуды колебаний ротора нельзя снимать грузик и менять углы. После выполнения расчета (п. 8) можно переместить грузик на соответствующее расстояние rп.
7) По формулам табл. 7.2 вычисляются радиус положения противовеса rп и угол между нулевым диаметром и направлением радиуса-вектора. Вес противовеса Qп принимается равным весу добавочного груза Qд.
Т а б л и ц а 7.2
Формулы для вычисления радиуса противовеса rп и угла между нулевым
диаметром и направлением радиуса-вектора п
|
Формулы |
Результаты вычислений |
|
Ад = Ад / (Qдrд) Qпrп = Q1r1 Qп = Qд
rп = (Q1r1) / Qп Ад2 2А1Ад cos п = (А12 + Ад2 – А32) / (2А1Ад) п –п (180–)п (180 + )п |
|
Статический момент противовеса (Qпrп) должен быть равен статическому моменту неуравновешенной массы (Q1r1).
Угол αп равен arсcos (А12 + Ад2 – А32) / (2А1Ад). Одному значению косинуса соответствуют два значения угла αп: –αп и +αп. Следовательно, противовес должен быть расположен на одном из диаметров, определяемых углом ±αп.
При начальной установке добавочного груза (и наличии двух прорезей) не фиксируется его положение относительно нуля, поэтому проверка сбалансированности делается при четырех углах: αп; –αп; 180 – αп; 180 + αп.
8) Рассчитанный противовес, вес которого равен весу добавочного груза, устанавливается в плоскости 6 на расстоянии rп (в той же прорези) и производится контроль балансировки при четырех углах положения плоскости 6.
9) Вычислив среднее значение наименьшей из амплитуд, определяют относительную величину остаточной неуравновешенности, равную отношению остаточной амплитуды Ак к начальной А1:
δА = (Ак / А1) · 100 % (7.6)
Значения остаточной амплитуды Ак занести в табл. 7.3.
Т а б л и ц а 7.3
Значения остаточной амплитуды сбалансированного ротора
|
Амплитуда |
Измерения при угле αп = … |
δА = (Ак / А1) × × 100 % | |||
|
первое |
второе |
третье |
среднее | ||
|
Ак |
|
|
|
|
|
10) Уравновешивание в плоскости 6а не производится.
11) Составить отчет о ходе выполнения работы.
12) Вывод по выполненной работе.