

7.7. Методы получения колебаний с однополосной модуляцией
В § 7.1 упоминался один метод формирования сигналов с ОМ, который заключается в использовании для этой цели амплитудного модулятора и полосового фильтра. В дальнейшем метод стали называть фильтровым. Долгое время этот метод казался несовершенным, поскольку требовал для своего осуществления высококачественных, а значит дорогих и сложных полосовых фильтров. Поэтому в разное время было предложено много других методов, которые реализуются без таких фильтров. Среди них наибольшую известность получили фазоразностный метод, фазофильтровой метод Уивера, синтетический метод Верзунова.
Тщательный анализ фазоразностного и фазофильтрового методов показал, что поскольку эти методы основаны на компенсации нежелательных продуктов модуляции (несущей, второй боковой), невозможно получить высокие и устойчивые по времени показатели модуляторов, построенных по этим методам. Что касается синтетического метода Верзунова то по сути дела — это метод переноса каким-то образом уже сформированного однополосного сигнала на другую несущую частоту.
В 40 — 50-х годах были достигнуты крупные успехи в разработке высококачественных полосовых ВЧ фильтров, использующих в качестве резонаторов кварцевые и стальные резонаторы. По этим причинам фильтровой метод формирования сигналов с ОМ стал преобладающим и в настоящее время широко используется в многоканальных устройствах. В последнее время разработаны и стали внедряться однополосные модуляторы, использующие цифровую обработку аналоговых сигналов. Поэтому ниже рассматриваются принципы осуществления и особенности реализации только для фильтрового и одного варианта цифрового метода получения колебаний с ОМ.
Принципиальная основа фильтрового метода заключается в том, что предварительно получается колебание с AM, а затем с помощью полосового фильтра выделяется колебание в желательной боковой полосе и подавляются колебания несущей и в другой боковой. На рис. 7.10 приведены структурная схема однополосного модулятора, состоящая из балансного модулятора и полосового фильтра, и диаграммы спектров сигналов в различных точках этой схемы. Если на входы балансного модулятора подать модулирующее колебание UΩ с частотой Ω = 2πF и колебание Uω с несущей частотой ω0 = 2πf0, то спектр колебания на выходе модулятора будет состоять из двух боковых полос и сильно подавленной несущей (рис. 7.10,в).
Полоса пропускания полосового фильтра выбирается так, чтобы пропускались составляющие только верхней (f0 + F1...f0 + F2) или только нижней (f0 − F1...f0 − F2) боковых полос. Спектры колебаний на выходе модулятора для этих случаев показаны на рис.7.10, г, д.
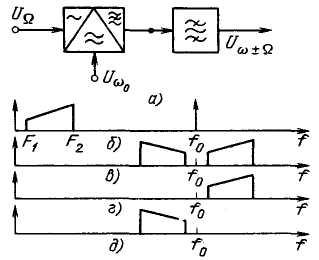
Рис. 7.10. Структурная схема однополосного
фильтрового модулятора и эпюры сигналов
Основные качественные показатели модуляторов, построенных с применением фильтрового метода, обусловлены входящими в них элементами: нелинейность амплитудной характеристики — балансными модуляторами и их числом, подавление нежелательных сигналов — полосовыми фильтрами.
Рассмотрим вопрос о нелинейности АХ. В модуляторах, собранных по схемам рис.7.11, используются трансформаторы НЧ (Тр1), трансформаторы ВЧ (Тр2) и диоды с возможно малым напряжением отсечки тока. Иногда для построения модуляторов используют биполярные или полевые транзисторы, варикапы и стабилитроны с дополнительным смещением.
Анализ работы простейшего модулятора можно выполнить, воспользовавшись эквивалентной схемой (рис. 7.12,а), если предварительно пересчитать параметры источника НЧ напряжения UΩ и Rг, а также нагрузки Rн в контур, где включены диод и источник ВЧ напряжения и течет ток i'н. При этом следует учесть, что к диоду приложено напряжение и'Ω + иω0 = n1UΩcosΩt + U0cosωt и что этот диод можно заменить ключом с сопротивлением Rп, который открыт при и'Ω + иω0 > ед0 [4].
Спектр тока i'н в области частот 0 < f < 1,5f0 показан на рис. 7.11, а. Он содержит постоянную компоненту (которая отсутствует в нагрузке RH реального модулятора из-за наличия трансформатора Тр2), компоненты с частотами исходных колебаний F и f0, компоненты модуляции I(f0 ± F) c частотами f0 + F и f0 − F, гармоники частоты f0, а также компоненты, не показанные на рис. 7.11, а, с комбинационными частотами вида mf0 ± nF, где m = 1, 2, ... и n = 1, 2, ...
Ток i'н имеет форму усеченных косинусоидальных импульсов (рис. 7.12,б). Угол отсечки этого тока θ = arccos (n1UΩcosΩt/U0) зависит, строго говоря, от обоих напряжений: UΩ и U0. Чтобы обеспечить линейность модуляционной характеристики I(f0 ± F) = f(UΩ) этого модулятора, необходимо сделать цепь тока i'н квазилинейной, т. е. добиться независимости работы ключа K от величины модулирующего напряжения UΩ. Этого можно достичь, если угол отсечки θ не будет зависеть от UΩ, т. е. если выполняется условие U0>>n1UΩ [14].

Рис. 7.11. Балансные модуляторы и эпюры
спектров выходного сигнала

Рис. 7.12. Эквивалентная схема диода в БМ и эпюра токов
Анализ работы более сложных модуляторов проводится как бы в два этапа: сначала так же, как и для простейшего, определяют токи через диоды, а затем находят результирующий ток в нагрузке.
В модуляторе рис. 7.11,б вследствие симметричности схемы относительно источника колебаний несущей частоты в спектре выходного сигнала компонента с несущей частотой обычно сильно подавлена. Эта схема достаточно практична, так как возможная точность симметрии, от которой зависит степень подавления компоненты с несущей частотой f0, определяется лишь точностью подбора диодов в мостике. Применение диодных сборок или согласованных пар биполярных или полевых транзисторов обеспечивает подавление несущей на 35...45 дБ. Широкое распространение получили балансные модуляторы, собранные по схеме рис. 7.11,в. Основным их достоинством наряду с меньшим числом нежелательных спектральных компонент тока i'н является на 2...3 дБ меньшее затухание b=20lg(UΩ/U(f0 ± F)), чем в модуляторе по схеме рис. 7.11, б. Объясняется это тем, что балансный модулятор состоит как бы из двух симметричных модуляторов, работающих в двухтактном режиме.
Для подавления несущей и нежелательной боковой в однополосном модуляторе (см. рис. 7.10,а) служит полосовой фильтр. Этот фильтр должен иметь малую неравномерность затухания в полосе прозрачности и очень крутые скаты, поскольку частотный интервал между ближайшими краями боковых, равный 2FH, где FH — нижняя модулирующая частота, очень мал по сравнению с несущей частотой. Из теории фильтров известно, что для реализации таких фильтров требуется высокая добротность контуров, из которых образуется фильтр. Для получения необходимого подавления несущей и нежелательной боковой полосы используются часто трех-четырехзвенные фильтры из звеньев типа т.
Оценим необходимую добротность резонаторов для фильтра на примере П-образного звена, показанного на рис. 7.13. Пусть частота f∞1 соответствует частоте f0, а частоты fср1 и fср2 — границам полосы канала B1. Из теории фильтров известно, что для получения малой неравномерности затухания в полосе пропускания и большого затухания в полосе задержания необходимо, чтобы контуры, настроенные на частоты f0 и fω (L2C2 и L3C3), имели в полосе пропускания чисто реактивное сопротивление. Это означает, что половина полосы пропускания этих контуров Δf должна быть меньше интервалов fω...fср2 или fср1...f0, т. е. Δf = (fср1 − f0). Здесь l — коэффициент запаса, зависящий от необходимого затухания в полосе задержания фильтра и от величины m(l ≥ 3...5). Если теперь учесть, что для лучшей равномерности затухания в полосе пропускания принимают т = 0,4...0,6, при которых параметр полосы φ(m) = (fср1 − f0)/( fср − fср1) ≈ 0,15 и что добротность контуров Q = f /2Δf, то после простых преобразований можно получить приблизительную формулу Q = lf0/φ(m)ΔF.
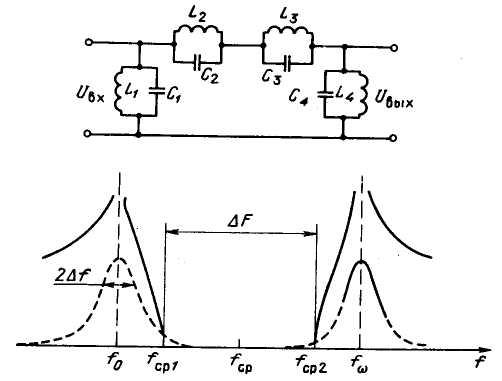
Рис. 7.13. Звено полосового фильтра и его АЧХ
Расчет по этой формуле для φ(m) = 0,15, Δf = 3100 Гц и l = 5 показывает, что необходимые добротности контуров фильтра для частот f0, равных, например, 20, 100 и 500 кГц, соответственно приблизительно равны 200, 1000 и 5000. Резонансные контуры, выполненные на катушках с ферритовыми сердечниками, имеют добротность не выше 200...300. Поэтому при использовании фильтров с такими контурами первую несущую частоту f0 можно брать не выше 25 кГц.
В современных модуляторах применяются фильтры с кварцевыми или стальными резонаторами. При добротности кварцевых резонаторов около 10...20 тыс. и выше можно создавать двух-трехзвенные высококачественные фильтры для частот 5... 10 МГц и даже выше. Однако до сих пор широко распространены кварцевые фильтры для частот 100...150 кГц, так как именно для этих частот возможно изготовление дешевых резонаторов с малым ТКЧ.
В последние годы были разработаны так называемые интегральные кварцевые фильтры, выполненные на одном кристалле, благодаря чему удалось, пока в опытном порядке, резко снизить температурные нестабильности и создать высококачественные фильтры для частот до 10...15 МГц.
В передатчиках низовой телефонной связи с допустимой неравномерностью АЧХ 3...6 дБ широко применяют электромеханические фильтры, резонаторы которых выполнены в виде дисков из специальной легированной стали, имеют добротность до 5000 и сравнительно низкий ТКЧ. Канальные фильтры, содержащие от 7 до 13 таких резонаторов, выполняют для частот до 500 кГц.
Таким образом, первая поднесущая частота f0 может выбираться в пределах 100...500 кГц и для транспонирования передаваемого сигнала в рабочий диапазон частот необходимо использовать еще одно — три преобразования. Этой цели служит тракт переноса ТП (рис. 7.14), состоящий из нескольких балансных модуляторов (БМ), усилителей для поддержания необходимых уровней сигналов на входах БМ (на схеме усилители не показаны) и фильтров.
Для того чтобы выходной сигнал с частотой fн оказался в рабочем диапазоне частот передатчика и при этом не требовались в ТП перестраиваемые фильтры, реализуется обычно следующий метод. Сформированный в однополосном модуляторе ОМ сигнал с несущей частотой f1 с помощью последующих одного-двух преобразований переносится на частоту значительно более высокую, чем верхняя частота рабочего диапазона. Затем с помощью последнего преобразователя сигнал е ОМ переносится непосредственно в рабочий диапазон. На рис. 7.14 для иллюстрации и поэтому без соблюдения масштаба показаны ориентировочные значения частот в разных точках ТП применительно к возбудителю для KB передатчика с рабочим диапазоном частот 1...30 МГц.
При таком решении ТП нет необходимости в перестраиваемых фильтрах, поскольку к входам БМ3 подводятся ОМ сигнал с несущей 80 МГц и сигнал от синтезатора с дискретными частотами в диапазоне 81...110 МГц (сетка частот). Неперестраиваемый фильтр нижних частот выделяет сигналы с разностной частотой fн — 80 МГц, т. е. на любой частоте диапазона 1...30 МГц. Входные частоты БМ3 и их гармоники фильтр подавляет, поскольку частота среза для него выбирается немного выше 30 МГц.

Рис. 7.14. Частотный план и структурная схема тракта переноса
Число преобразователей в ТП зависит от ряда факторов: частоты f1, на которой формируется ОМ сигнал, целесообразных параметров фильтров и требуемого рабочего диапазона частот. Реализация фильтров в ТП заметно легче, чем в ОМ, поскольку для них относительная расстройка между пропускаемой и подавляемой полосами заметно больше, чем для фильтра в ОМ (см. рис. 7.10,а).
В ТП, как и в ОМ, необходима высокая линейность сквозной АХ, зависящая от типов и режимов ЭП, применяемых в БМ.
Выше было уже отмечено, что операция однополосной модуляции по существу является операцией переноса спектра исходного модулирующего сигнала (то же однополосного, но с нулевой несущей частотой) на другой частотный уровень. Для выполнения этой операции могут использоваться как аналоговые устройства (описанный выше ОМ с БМ и полосовым фильтром), так и устройства цифровой обработки сигналов. Применение цифровых устройств, в частности однополосных модуляторов, базируется на хорошо развитой теории и богатой элементной базе [7, 22, 36 и др.].
В устройствах цифровой обработки сигналов аналоговый сигнал предварительно переводится в цифровую форму (цифровой сигнал) с помощью АЦП, подвергается обработке и затем с помощью ЦАП результирующему сигналу возвращается аналоговая форма. Существует несколько алгоритмов для операции переноса спектра цифрового сигнала. На рис. 7.15 показана схема одного такого алгоритма. Здесь исходный цифровой сигнал умножается на комплексный сигнал с частотой γ ≈ (Fн + Fв)/2, при этом происходит сдвиг спектра и образуется комплексный цифровой сигнал. Затем повышается частота дискретизации (интерполяция) и производится фильтрация ненужных составляющих. Далее осуществляется перенос спектра компонент комплексного сигнала и выделяется вещественная часть цифрового сигнала Y, т. е. цифровой сигнал, соответствующий однополосному с несущей частотой β.
Устройство, реализующее схему рис. 7.15, содержит два цифровых ФНЧ, имеющих довольно сложный алгоритм, если необходимо получить приемлемые показатели этих фильтров.

Рис. 7.15. Структурная схема цифрового однополосного модулятора
Другой алгоритм получения однополосного модулированного сигнала (т. е. переноса спектра исходного модулирующего сигнала
![]()
к частоте ω0) состоит из последовательности следующих операций.
Добавление к uм(t) постоянной величины H, соответствующей желаемой амплитуде колебания с несущей частотой ω0.
Получение сигнала
 ,
сопряженного с исходным с помощью
преобразования Гильберта и имеющего
тот же спектр, что и у исходного сигнала.
,
сопряженного с исходным с помощью
преобразования Гильберта и имеющего
тот же спектр, что и у исходного сигнала.Получение модулирующего сигнала в комплексной форме (аналитический сигнал): w = Н + им + j·uм.
Умножение сигнала w на комплексный сигнал
 с частотой ω0:
s
= wv.
с частотой ω0:
s
= wv.
Выделение вещественной части этого произведения в виде
![]() .
.
Сигнал sOM
имеет такой
же спектр, что и у исходного и сопряженного
ему сигналов им
и
![]() ,
но он оказался
перенесенным к частоте ω0.
Другими словами, получен однополосный
сигнал, у которого Н
и ω0
— амплитуда и частота несущего колебания.
,
но он оказался
перенесенным к частоте ω0.
Другими словами, получен однополосный
сигнал, у которого Н
и ω0
— амплитуда и частота несущего колебания.
Алгоритм имеет
еще одно полезное свойство: наличие
исходного uм
и сопряженного
с ним
![]() сигналов позволяет найти огибающую
исходного сигнала с добавлением
постоянной величиныН:
сигналов позволяет найти огибающую
исходного сигнала с добавлением
постоянной величиныН:
![]() .
.
Наконец, получив однополосный сигнал sOM и разделив его на A(t), имеем сигнал с единичной амплитудой и угловой модуляцией cos[ω0t + Ψ(t)].
Операции нахождения огибающей и сигнала с угловой модуляцией соответствуют операциям линейного детектирования и бесконечного амплитудного ограничения. Выполнив перечисленные операции (при достаточно высокой разрядности n = 12...16 и корректных программах), можно получить выходные сигналы с s0M, A(t) и cos[ω0t + Ψ(t)] с меньшими искажениями, чем в аналоговых устройствах, поскольку при цифровой обработке исключаются влияние нелинейности элементов БМ, нелинейность и постоянная времени амплитудного детектора и АФК, как правило, сопровождающая процесс амплитудного ограничения в аналоговых устройствах.
На рис. 7.16 приведена структурная схема цифрового ОМ, в котором возможно получение однополосного сигнала в виде (7.6) и его составляющих, если возбудитель используется в передатчике с раздельным усилением. Реализуется также возможность регулировать амплитуду колебания несущей частоты.
Исходный сигнал
поступает через согласующий усилитель
к АЦП, превращается в цифровой сигнал
и подводится к трансформатору Гильберта
[5, 7, 6, 22]. К одному из выходных сигналов
трансформатора Гильберта — ТГ (в
приведенном случае — к сигналу
косинусоидальных составляющих) в
сумматоре добавляется сигнал Н
в виде
константы. Полученные таким образом
сигналы на выходе сумматора (H
+ uм)
и на втором выходе
![]() подаются
непосредственно и через инверторы к
коммутатору (Ком). Движок коммутатора,
фигурально говоря, приводится в
действие сигналом тактовой частоты,
может вращаться в том или обратном
направлении и за четыре периода тактовой
частоты делает один оборот. По существу
инверторы и ключ К выполняют операции
4 и 5 алгоритма, т. е. производят комплексное
перемножение w
и v
и выделяют вещественную составляющую.
подаются
непосредственно и через инверторы к
коммутатору (Ком). Движок коммутатора,
фигурально говоря, приводится в
действие сигналом тактовой частоты,
может вращаться в том или обратном
направлении и за четыре периода тактовой
частоты делает один оборот. По существу
инверторы и ключ К выполняют операции
4 и 5 алгоритма, т. е. производят комплексное
перемножение w
и v
и выделяют вещественную составляющую.
Таким образом, от движка коммутатора к элементу S/A поступает цифровой сигнал, соответствующий сигналу с ОМ, амплитудой несущей Н и частотой несущей fн = fт/4. При замкнутом ключе К сигнал с ОМ поступает к ЦАП1 и превращается в аналоговую форму. В полосовом фильтре, подключенном к выходу ЦАП1, снижается уровень внеполосных колебаний.

Рис. 7.16. Структурная схема цифрового однополосного
модулятора с трансформатором Гильберта
Квадраторы (X2), сумматор и извлекатель квадратного корня реализуют алгоритм получения огибающей. Сигналы огибающей подводятся к ЦАП2, превращаются в аналоговую форму и через согласующий усилитель могут подаваться к тракту огибающей передатчика с раздельным усилением.
Сигналы огибающей в цифровом виде с выхода извлекателя подаются к делителю, в котором производится деление цифрового сигнала SOM на цифровой сигнал A(t). Деление производится при разомкнутом ключе К. В этом случае к ЦАП1 подводится цифровой сигнал, соответствующий сигналу с единичной амплитудой и угловой модуляцией cos[ω0t+Ψ(t)], несущая частота которого fн = fт/4. Ширина полосы пропускания фильтра выбирается так же, как и ширина полосы тракта огибающей передатчика.
При изготовлении такого рода модуляторов используются процессоры, регистры сдвига, мультиплексоры и другие элементы. При описании возбудителя для передатчика с раздельным усилением (см. § 7.5) было отмечено, что в тракте ВЧ сигнала необходимо устанавливать линию задержки. В рассматриваемом модуляторе возможны два решения: можно установить необходимую ЛЗ для аналоговых сигналов на выходе фильтра, где несущая частота постоянна; возможна также установка ЛЗ в виде сдвигающего регистра на выходе делителя S/A.
Что касается выбора тактовой частоты, то желательно, чтобы она была возможно выше: при этом будет выше fн и увеличивается эффективность подавления шумов квантования фильтром. Верхний же предел fт определяется частотными характеристиками процессора. Например, в реализованном примерно 10 лет назад фирмой Brown Boveri возбудителе с цифровым модулятором тактовая частота равна 100 кГц и, следовательно, fн = 25 кГц.
Современная элементная база позволяет построить аналогичное устройство на аналоговых элементах. Трансформатор Гильберта в этом случае можно выполнить в виде двух линейных цепей с общим входом и двумя выходами [46]. В полосе модулирующего сигнала эти цепи должны иметь равномерную АЧХ и такие ФЧХ, чтобы разность фаз выходных сигналов на любой частоте была равной 90°. Однако решение с использованием цифровой техники оказывается существенно легче, практичнее и дает лучшие результаты (лучшее качество получаемых сигналов, независимость во времени характеристик, высокая воспроизводимость).