

Покровский / УМК ОРЭ ч.2(для студентов) / Радиоэлектроника(часть2) / Ответы(часть2)№13
.docАвтоматические устройства управления и регулировок приемника
Современный приемник работает в условиях, которые часто меняются. Могут различаться уровни принимаемых сигналов от разных передающих станций, возможна нестабильность уровня сигнала от одного передатчика из-за изменения условий распространения радиоволн. Часто возникает необходимость обеспечить перекрытие широкого частотного диапазона и высокую точность настройки на определенную несущую частоту. Для выполнения таких требований в приемник специально вводятся устройства, позволяющие вручную и автоматически, непосредственно или дистанционно изменять и регулировать коэффициент усиления, частоту настройки и подбирать оптимальный режим работы.
Из специальных устройств, обеспечивающих стабильную работу приемника, следует выделить системы автоматической регулировки усиления (АРУ) и автоматической подстройки частоты (АПЧ). Эти системы могут выполняться как в аналоговом, так и цифровом виде.
Автоматическая регулировка усиления. Такая регулировка обеспечивает на выходе приемника практически неизменный уровень сигнала при больших (50... 100 дБ) колебаниях амплитуд входного сигнала. Структурная схема супергетеродинного приемника с АРУ и АПЧ, применяемая в аналоговых системах связи с амплитудно-модулированными колебаниями, приведена на рис. 8.9.
Принцип действия АРУ основан на автоматическом изменении коэффициентов усиления отдельных каскадов усилителей приемника при изменениях уровня входного сигнала. Главный элемент системы - амплитудный детектор АРУ (Д АРУ), который подключен к выходу УПЧ. Вырабатываемое детектором АРУ постоянное управляющее напряжение uy должно быть пропорционально среднему уровню принимаемого сигнала и не зависеть от глубины амплитудной модуляции. Поэтому на выходе детектора АРУ обязательно включается ФНЧ (на схеме рис. 8.9 для упрощения не показан). Постоянное управляющее напряжение uy поступает на усилительные каскады и соответствующим образом изменяет режим работы активных элементов по постоянному току.
Схема АРУ, рассмотренная выше, является наиболее простой и поясняет лишь принцип ее действия. Основной недостаток данной схемы — уменьшение коэффициента усиления приемника даже при малых уровнях сигнала на выходе, что может привести к его полной потере. Поэтому в настоящее время используются более сложные схемы АРУ, позволяющие обеспечить оптимальные режимы работы усилительных каскадов приемника при любых приемлемых уровнях принимаемого сигнала.

Рис. 8.9. Структурная схема супергетеродинного приемника с АРУ и АПЧ
Автоматическая подстройка частоты. Эта подстройка применяется для предотвращения самопроизвольной расстройки приемника с приема выбранной радиостанции, обусловленной нестабильностью частот передатчика и гетеродина. Нестабильность частоты настройки приемника в основном проявляется в нестабильности промежуточной частоты. Чтобы эта частота изменялась в допустимых пределах, или вообще была стабильной, применяют АПЧ гетеродина (рис. 8.9).
Основным элементом любой системы АПЧ является частотный детектор (ЧД), подключенный к выходу УПЧ (петля АПЧ). Если промежуточная частота точно совпадает с номинальным значением, то напряжение на выходе частотного детектора равно нулю. При отклонении значения промежуточной частоты от номинального, на выходе частотного детектора появляется постоянное напряжение ичд, величина которого пропорциональна расстройке приемника, а полярность соответствует знаку расстройки. Это постоянное напряжение поступает на вход гетеродина и подстраивает его таким образом, чтобы на выходе УПЧ было номинальное значение промежуточной частоты. Система АПЧ отслеживает частоту принимаемой станции только в том случае, когда полезный сигнал имеет достаточный уровень, и на входе приемника не действует более мощный, близкий по частоте, мешающий сигнал. Если же такой мешающий сигнал поступает на вход устройства, то система АПЧ может настроить приемник не на полезный, а на мешающий сигнал.
Цифровая система АРУ. По выполняемым функциям, принципу действия и структурной схеме система цифровой автоматической регулировки усиления (ЦАРУ) мало в чем отличается от аналоговой АРУ: специфика ЦАРУ состоит лишь в цифровой реализации узлов известной аналоговой структурной схемы. Одна из проблем, которую необходимо решить при разработке системы ЦАРУ, заключается в ее сопряжении с регулируемыми каскадами (усилителями с переменными коэффициентами усиления, управляемыми аттенюаторами и прочее). Если в регулируемом каскаде приемника имеется цифровой управляющий вход, то сопряжение не представляет никаких затруднений. При аналоговом же управлении регулируемым каскадом необходимо ввести в схему приемника дополнительный цифроаналоговый преобразователь.

Рис. 8.10. Структурная схема системы цифровой АРУ
Рассмотрим структурную схему простейшей системы цифровой АРУ (рис. 8.10), которая осуществляет регулировку коэффициентов усиления каскадов УПЧ приемника. В схеме использованы усилительные каскады с нерегулируемым коэффициентом усиления, однако, перед ними включен аттенюатор в виде магазина сопротивлений, переключаемый цифровым кодом.
Для определения уровня регулируемого сигнала к выходу УПЧ подключен аналоговый детектор АРУ (Д АРУ). Сигнал на его выходе UДАРУ подвергается квантованию в АЦП. Проанализируем принцип действия системы ЦАРУ при простейшем, бинарном квантовании сигнала в АЦП. Алгоритм работы схемы квантователя АЦП следующий:
-
если UДАРУ меньше напряжения задержки E3 (уровень выходного напряжения УПЧ uвых(t), котором происходит срабатывание ЦАРУ), то вырабатывается сигнал ошибки Z = −1;
-
если UДАРУ больше напряжения задержки Е3, то Z = +1.
Данный сигнал ошибки Z поступает в цифровой интегратор — усредняющий реверсивный счетчик (РС1) с коэффициентом счета R1. При переполнении счетчика РС1 на его выходе появится импульс, увеличивающий или уменьшающий на единицу (в зависимости от знака переполнения) число во втором реверсивном счетчике, (РС2). Состояние счетчика РС2, т. е. записанный в нем цифровой код, может изменяться в пределах от 0 до R2max. Этот счетчик не должен переполняться: когда код в РС2 достигнет значения 0 или R2max, происходит блокировка поступления импульсов соответствующего знака с помощью устройства блокировки переполнения (УБП). Цифровой код счетчика РС2 дискретно регулирует коэффициент передачи управляемого аттенюатора, который, в свою очередь, изменяет коэффициент усиления УПЧ.
Частоту fд дискретизирующей последовательности импульсов следует выбирать в 10...15 раз больше верхней частоты спектра сигнала на входе АЦП. Последняя определяется шириной полосы пропускания ФНЧ, включенного на выходе детектора АРУ. Постоянную времени этого фильтра выбирают на порядок меньше минимально допустимой длительности переходных процессов в основных узлах системы ЦАРУ, тогда эта длительность будет определяться цифровой, а не аналоговой частью устройства автоматического регулирования.
Цифровая система ФАГГЧ. Структурная схема системы фазовой автоподстройки частоты (ФАПЧ) приведена на рис. 8.11. В системе производится сравнение на фазовом детекторе (ФД) мгновенных фаз эталонного сигнала частоты fс и колебания частоты fуг, вырабатываемого управляемым генератором (УГ). Затем осуществляется подстройка частоты fуг управляемого генератора под эталонную частоту fс. Эта схема характеризует как аналоговую, так и цифровую систему ФАПЧ (ЦФАПЧ). В последнем случае все или некоторые блоки схемы рис. 8.11 выполняются цифровыми. При этом возможны различные варианты реализации блоков. Так, фазовый детектор можно построить по любой из схем, описанных в гл. 6. При этом ФНЧ может быть в аналоговом или цифровом исполнении, что зависит от вида сигнала, управляющего УГ. Если УГ имеет управляющий вход аналогового вида, то предпочтительнее использование аналогового фильтра, а если же он управляется цифровым кодом, то предпочтительнее использовать ЦФ.



Рис. 8.14. Структурная схема Рис. 8.12. Упрощенная Рис. 8.13. Структурная схема
системы цифровой ФАПЧ практическая схема ЦФАПЧ полностью цифровой ФАПЧ
Упрощенная практическая структурная схема ЦФАПЧ показана на рис. 8.12. В качестве УГ в ней использована отдельная интегральная схема (например, 531ГГ1; обозначена Г); ФД реализован на одном логическом элементе «Исключающее ИЛИ» (=1), а ФНЧ — простейший, аналоговый в виде интегрирующей RС-цепи.
В полностью цифровой системе ЦФАПЧ ФНЧ выполнен по схеме цифрового фильтра (ЦФ), в качестве фазового детектора использована схема цифрового ФД (ЦФД), а УГ имеет цифровое управление (рис. 8.13).
Использование высокостабильных гетеродинов позволяет принципиально решить задачу настройки приемника на частоту полезного сигнала. Для получения стабильных частот в неперестраиваемых (узкодиапазонных) приемниках в схему гетеродина вводят генератор с кварцевой стабилизацией частоты. Если же передатчик работает на ряде фиксированных частот, то в качестве гетеродинов используют синтезаторы частоты.
Литература: В.И. Нефедов, “Основы радиоэлектроники и связи”, Издательство «Высшая школа», Москва, 2002.
9.3. АВТОМАТИЧЕСКАЯ РЕГУЛИРОВКА УСИЛЕНИЯ
Автоматическая регулировка усиления (АРУ) предназначена для поддержания постоянного напряжения на выходе УПЧ, необходимого для нормальной работы выходных устройств приемника [2]. Уровень сигнала на входе приемника изменяется обычно в очень широких пределах; при максимальном напряжении на входе РПрУ система АРУ должна обеспечить минимальный коэффициент усиления УТ приемника и наоборот. Таким образом, задача АРУ — изменять усиление УТ РПрУ в зависимости от уровня входного сигнала. Система АРУ должна иметь устройство, напряжение Ерег на выходе которого зависит от уровня сигнала в радиотракте. Таким устройством может служить, например, амплитудный детектор. Напряжение Ерег, подаваемое на усилительные каскады, изменяет их коэффициент усиления. Для АРУ в приемнике создается цепь, состоящая из детектора АРУ и фильтра.
За счет АРУ в приемнике диапазон изменения напряжения сигнала UВЫХ/UВЫХ НОМ на его выходе меньше, чем диапазон изменения сигнала UBX/UBX H0M на входе, где UВЫХ НОМ и UВХ НОМ — требуемые номинальные напряжения соответственно на выходе и входе приемника. Чем меньше это отношение, называемое диапазоном АРУ, тем эффективнее АРУ в приемнике.
В зависимости от способа подачи регулируемого напряжения АРУ подразделяются на обратные, прямые и комбинированные.
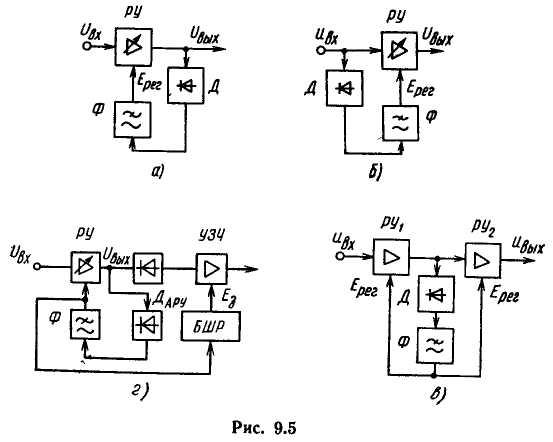
Структурная схема обратной АРУ. В этой схеме (рис. 9.5,а) напряжение регулировки Ерег получают из напряжения UВЫХ на выходе регулируемого усилителя (РУ), в котором могут применяться способы регулировки усиления, рассмотренные в § 9.2. Напряжение Ерег подается со стороны выхода в направлении входа РУ, что и обусловило название этого вида АРУ. Детектор АРУ (Д) обеспечивает напряжение Eрег на его выходе, пропорциональное амплитуде напряжения UВЫХ: Eрег = KдUвых. Фильтр АРУ (Ф) отфильтровывает составляющие частот модуляции и пропускает медленно меняющиеся составляющие напряжения Eрег. Цепь АРУ, которая состоит только из детектора и фильтра, называют простой АРУ. В цепь АРУ может включаться усилитель до или после детектора. Усилитель до детектора АРУ — это УПЧ, после детектора— УПТ. В высококачественных РПрУ усилитель иногда включают и до, и после детектора. При наличии в цепи АРУ усилителя ее называют усиленной.
Работа регулируемого усилителя совместно с цепью АРУ описывается характеристикой АРУ (рис. 9.6), показывающей зависимость Uвых = F(Uвх). Если АРУ простая, то при увеличении Uвх напряжение Uвых = K0Uвх из-за уменьшения за счет АРУ резонансного коэффициента усиления K0 увеличивается в меньшее число раз, чем напряжение Uвх. С повышением Uвых увеличивается Eрег и соответственно уменьшается K0. Недостаток простой АРУ состоит в том, что коэффициент усиления радиотракта уменьшается и при приеме слабых сигналов, когда этого не требуется. Для устранения этого недостатка используют АРУ с задержкой, в которой цепь АРУ начинает действовать только в том случае, когда входное напряжение UBX превышает пороговое Uпор; при этом слабые сигналы цепью АРУ не ослабляются (см. рис. 9.6). При идеальной работе цепи АРУ с задержкой для UBX ≥ Uпор напряжение на выходе усилителя постоянно (штриховая линия на рис. 9.6). По мере увеличения коэффициента усиления усилителя в цепи регулировки характеристика АРУ реального усилителя все в большей степени приближается к идеальной.

Особенностью обратной регулировки является то, что она не позволяет получать идеальную характеристику АРУ: можно лишь приблизиться к ней. Обратная АРУ не может быть идеальной, поскольку для ее работы принципиально необходимо приращение выходного напряжения ΔUвых. Если допустить, что АРУ идеальна, то ΔUвых = 0, при этом Eрег = const; K0 = const, регулировка отсутствует, а следовательно, Uвых должно возрастать.
Структурная схема прямой АРУ. Цепь АРУ (рис. 9.5,6) подключена к входу регулируемого усилителя, напряжение регулировки Ерег получается в результате детектирования входного напряжения. При увеличении UBX напряжение на выходе детектора АРУ возрастает, при этом увеличивается Ерег, что вызывает уменьшение K0. Напряжение Uвых = K0Uвх. Если Ubx увеличивается, то K0 уменьшается; при этом их произведение может оставаться постоянным. Прямая АРУ позволяет в принципе получить идеальную характеристику регулировки (рис. 9.7), но практически добиться этого не удается. Такой АРУ свойствен ряд недостатков, основной из которых состоит в необходимости включать перед детектором в цепи АРУ дополнительный усилитель с большим коэффициентом усиления. Прямая АРУ нестабильна, т. е. подвержена действию различных дестабилизирующих факторов. Если, например, из-за изменения температуры или напряжения источника питания коэффициент усиления K0 регулируемого усилителя увеличится, то характеристика АРУ из идеальной превратится в характеристику с нарастающим UВЫХ (см. рис. 9.7).
Структурная схема комбинированной АРУ. В этом случае (рис. 9.5, в) рационально используются преимущества обеих схем АРУ: стабильность обратной АРУ и возможность получения идеальной характеристики в прямой АРУ. Для первого усилителя — это обратная, а для второго — прямая АРУ. Основная регулировка происходит в РУ1 он, как правило, содержит несколько регулируемых каскадов. Второй регулируемый усилитель обычно однокаскадный, его основная задача — несколько скомпенсировать возрастающее напряжение на выходе первого усилителя. То, что идеальная регулировка не достигается на практике, не имеет большого значения, так как пределы изменения UВЫХ невелики.
Бесшумная АРУ. Система АРУ обеспечивает в приемнике максимальное усиление тогда, когда принимается слабый сигнал. Это приводит к увеличению уровня шумового напряжения на выходе приемника. Устраняет это явление бесшумная АРУ (рис. 9.5, г), для реализации которой создается специальная цепь бесшумной регулировки БШР, управляемая Ерег. Если Ерег становится ниже определенного уровня, то цепь БШР вырабатывает напряжение Ерег, запирающее УЗЧ; при превышении Ерег этого порогового значения Ез становится равным нулю, УЗЧ отпирается и работа приемника восстанавливается. Имеется ряд схемных реализаций цепи БШР.
Назначение фильтра в цепи АРУ. Амплитуда сигнала в приемнике может изменяться по двум причинам: 1) при использовании амплитудной модуляции для передачи информации в системе связи или радиовещания; 2) из-за замираний, при которых уровень сигнала на входе приемника изменяется по случайному закону в широких пределах. Цепь АРУ должна устранять только замирания сигнала, но не должна реагировать на полезные изменения амплитуды AM сигнала, что обеспечивается с помощью фильтра АРУ.
Скорость полезных и вредных изменений амплитуды сигнала различна. При AM амплитуда сигнала подвержена быстрым изменениям, например при телефонной связи и звуковом радиовещании частота модуляции составляет 50... 5000 Гц. Замирания сигнала в основном медленные, обычно частота замираний 0,1... ... 10 Гц. Напряжение Ед на выходе детектора АРУ содержит полезную и вредную из-за замираний сигнала составляющие. Напряжение Ерег на выходе фильтра АРУ определяется только вредной составляющей напряжения Ед.
В качестве фильтра используют обычно простую цепь RфСф. Если АРУ осуществляется в нескольких регулируемых каскадах усиления, то ставят не один, а несколько фильтров.
Искажения AM сигнала в усилителе с АРУ. В реальных цепях АРУ фильтр не полностью подавляет составляющие частоты модуляции напряжения на выходе детектора АРУ. Это приводит к искажениям сигнала. Для пояснения процесса возникновения искажений положим вначале, что цепь АРУ идеальна, а на входе регулируемого усилителя действует AM колебание с модуляцией одним тоном частоты F; тогда огибающая этого AM колебания UBX = UH(1 + mcosΩt), где т — коэффициент модуляции; Ω = 2nF— угловая частота модулирующего колебания; UH — амплитуда несущей. При идеальной АРУ цепь регулировки вырабатывает постоянное напряжение Eрег0, при котором коэффициент усиления усилителя K0=SpегEper, где Sрег — крутизна регулировочной характеристики. Тогда при идеальной цепи АРУ огибающая выходного напряжения
![]()
В
реальной цепи АРУ фильтр не полностью
подавляет составляющие
частоты модуляции, к тому же вносит
определенный фазовый
сдвиг φ, с учетом этого напряжение
регулировки
![]() ,
где т'Ерег
—
амплитуда составляющей частоты F
на
выходе фильтра АРУ. Предположим, что
зависимость коэффициента усиления
усилителя от Eрег—
линейная с крутизной Speг
регулировочной характеристики. При
этом коэффициент усиления
регулируемого усилителя будет меняться
по закону
,
где т'Ерег
—
амплитуда составляющей частоты F
на
выходе фильтра АРУ. Предположим, что
зависимость коэффициента усиления
усилителя от Eрег—
линейная с крутизной Speг
регулировочной характеристики. При
этом коэффициент усиления
регулируемого усилителя будет меняться
по закону
![]() и огибающая напряжения на выходе
регулируемого
усилителя
и огибающая напряжения на выходе
регулируемого
усилителя
![]() .
Произведя преобразования, получим
.
Произведя преобразования, получим
![]() .
(9.2)
.
(9.2)
Сравнивая (9.1) и (9.2), отмечаем, что напряжение UВЫХ при неидеальном фильтре АРУ отличается от UВЫХ при идеальном, что обусловливает появление искажений сигнала. Эти искажения проявляются в следующем: 1) изменение коэффициента усиления с частотой модуляции приводит к изменению коэффициента модуляции сигнала, при φ = 0 и отрицательной Sper глубина модуляции сигнала уменьшается; 2) напряжение на выходе усилителя оказывается промодулированным не только тоном с частотой F, но и его второй гармоникой с частотой 2F, что приводит к нелинейным искажениям закона модуляции. Эти искажения тем больше, чем больше произведение Sрегm', при Sрегm' = 0 искажения отсутствуют.
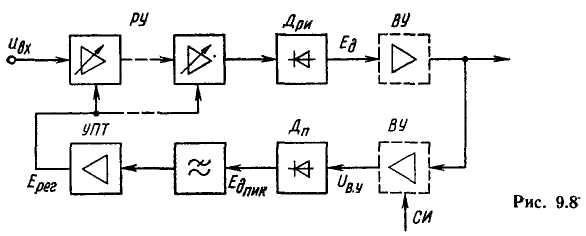
АРУ приемников импульсных сигналов (рис. 9.8). Для АРУ таких приемников характерны две особенности. 1. Импульсный сигнал детектируется дважды: вначале детектором радиоимпульсов (Дри), а затем пиковым детектором (Дп). Детекторы необходимы не только для нормальной работы АРУ, но и для детектирования сигнала в самом приемнике. Чтобы не ставить два детектора (в цепь сигнала и в цепь АРУ), детектор радиоимпульсов часто делают общим. Общим может быть и видеоусилитель (ВУ). 2. В интервалах между полезными импульсами могут возникать различные помехи; при импульсной многоканальной связи между импульсами данного канала действуют импульсы других каналов. В этом случае АРУ реагирует на все импульсы, а не только на те, которые должны быть выделены. Для устранения этого недостатка цепь АРУ открывают только на время действия полезных импульсов, т. е. применяют стробирование. Для этого один из каскадов цепи АРУ (обычно видеоусилитель) делают стробируемым, который открывается стробирующим импульсом (СИ) на время действия полезного импульса.
Быстродействующая АРУ. Такая АРУ служит для устранения перегрузки усилителя при действии мощной помехи. Для этой цели усилитель выполняется с переменным смещением; при мощной помехе цепь АРУ вырабатывает напряжение Eрег, смещающее рабочую точку транзистора усилителя влево (отрицательное смещение на УЭ возрастает). При этом усилитель не перегружается и информация об импульсном сигнале не теряется. Отличительная особенность БАРУ — высокая скорость ее срабатывания при мощной помехе; цепь БАРУ инерционна для сигнала и срабатывает только от помехи. Постоянная времени фильтра БАРУ во много раз меньше постоянной времени фильтра АРУ.
Переходный процесс в системе обратной АРУ. Проанализируем: поведение во времени усилителя с обратной АРУ при изменении за счет замираний амплитуды UBX. Предположим, что UBX скачком возросло, при этом в первый момент (при предположении безынерционности усилителя) UВЫХ также скачком возрастет, что приведет к скачкообразному увеличению напряжения на входе цепи АРУ. Из-за наличия в цепи АРУ инерционных элементов — фильтра детектора АРУ (который обычно мало инерционен по сравнению с ФНЧ) и ФНЧ Ерег не изменяется скачком, а начинает постепенно нарастать, что приводит к уменьшению K0 усилителя. Это в свою очередь вызывает уменьшение UВЫХ и соответственно изменение законов нарастания Ерег и уменьшения K0; как следствие, характер уменьшения UВЫХ становится сложным. В усилителе с АРУ возникает переходный процесс, и прежде чем напряжение UВЫХ на его выходе установится, проходит определенное время.
Закон
изменения UВЫХ
в
процессе установления, который может
быть
апериодическим либо колебательным,
зависит от типа ФНЧ в
цепи АРУ. Если ФНЧ — однозвенный
RфСф-фильтр,
то UВЫХ
будет
устанавливаться по экспоненциальному
апериодическому закону
с
![]() ,
где
,
где
![]() ,
ΔUВХ
и
ΔK0
— приращение входного напряжения и
соответственно вызываемое
им приращение коэффициента усиления
регулируемого усилителя.
В этом случае говорят о системе АРУ
первого порядка. Если
ФНЧ — двух- или трехзвенный, то его
переходный процесс носит
колебательный характер, что нарушает
нормальный прием сигнала.
,
ΔUВХ
и
ΔK0
— приращение входного напряжения и
соответственно вызываемое
им приращение коэффициента усиления
регулируемого усилителя.
В этом случае говорят о системе АРУ
первого порядка. Если
ФНЧ — двух- или трехзвенный, то его
переходный процесс носит
колебательный характер, что нарушает
нормальный прием сигнала.
Литература: Н. Н. Фомин, “Радиоприемные устройства”, Издате6льство «Радио и связь», Москва, 1996.