

8.4. Специальные преобразования сигнала
8.4.1. Модуляция и детектирование
Изменение одного сигнала в соответствии с формой другого сигнала называется модуляцией сигнала, а устройство, осуществляющее такое преобразование сигнала – модулятором. Обратное преобразование называется детектированием, а соответствующее устройство - демодулятором или детектором.
В измерительной технике модуляция используется для передачи сигналов и повышения точности измерений за счет отделения помех от полезных сигналов, происходящего при модуляции и последующем детектировании модулированного сигнала.
Сигнал
![]() ,
в соответствии с которым осуществляется
модуляция, называетсямодулирующим
сигналом, а сигнал, подвергаемый
модуляции, - модулируемым
или несущим
сигналом
,
в соответствии с которым осуществляется
модуляция, называетсямодулирующим
сигналом, а сигнал, подвергаемый
модуляции, - модулируемым
или несущим
сигналом
![]() .
В качестве такого сигнала обычно
используется высокочастотное гармоническое
колебание вида
.
В качестве такого сигнала обычно
используется высокочастотное гармоническое
колебание вида
![]() ,
(8.50)
,
(8.50)
где
![]() - соответственно амплитуда, циклическая
частота и начальная фаза.
- соответственно амплитуда, циклическая
частота и начальная фаза.
В зависимости от того, какой из параметров этого сигнала подвергается изменению, различают амплитудную, частотную (угловую) и фазовую модуляции. Получающиеся при этом сигналы соответственно называются амплитудно-модулированным (АМ), частотно-модулированным (ЧМ) и фазо-модулированным (ФМ) сигналами.
На рис. 8.6 показана форма этих сигналов для случая, когда модулирующий сигнал является гармоническим, т.е. имеет форму синусоиды (рис. 8.6, а). На рис. 8.7 показаны спектры этих сигналов.


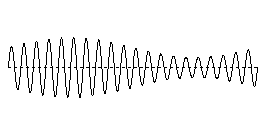



Рис. 8.6. Рис. 8.7.
Амплитудно-модулированный сигнал описывается следующей функцией времени
![]() ,
(8.51)
,
(8.51)
где
![]() - глубина модуляции, характеризующая
максимальное относительное изменение
амплитуды несущего сигнала
- глубина модуляции, характеризующая
максимальное относительное изменение
амплитуды несущего сигнала![]() (
(![]() );
);![]() - модулирующая функция, пропорциональная
измерительному сигналу
- модулирующая функция, пропорциональная
измерительному сигналу![]() (
(![]() ).
).
Если
![]() ,
то
,
то
![]() ,
(8.52)
,
(8.52)
т.е.
![]() .
(8.53)
.
(8.53)
Частотный спектр
такого сигнала показан на рис. 8.7, в
. Видно, что
в результате гармонической (тональной)
амплитудной модуляции к несущему
колебанию (8.50) добавляются две гармонические
компоненты с амплитудой
![]() каждая, имеющие частоты
каждая, имеющие частоты![]() и
и![]() .
Эти компоненты называютсябоковыми
частотами.
.
Эти компоненты называютсябоковыми
частотами.
Если амплитуда
несущего сигнала модулируется сигналом
общего вида
![]() ,
то каждая частотная компонента
,
то каждая частотная компонента![]() спектра этого сигнала, показанного на
рис. 8.7,г,
создает пару боковых частот, образуя
в спектре модулированного сигнала
боковые
полосы. В
результате спектр модулирующего сигнала
перемещается в область частот, примыкающих
к частоте несущего сигнала
спектра этого сигнала, показанного на
рис. 8.7,г,
создает пару боковых частот, образуя
в спектре модулированного сигнала
боковые
полосы. В
результате спектр модулирующего сигнала
перемещается в область частот, примыкающих
к частоте несущего сигнала
![]() ,
т.е.переносится
из области низких частот в область
высоких частот
(см. рис. 8.7, д).
Именно это свойство модуляции позволяет
с помощью фильтрации отделить помехи
от полезного сигнала.
,
т.е.переносится
из области низких частот в область
высоких частот
(см. рис. 8.7, д).
Именно это свойство модуляции позволяет
с помощью фильтрации отделить помехи
от полезного сигнала.
При частотной модуляции вместо (8.51) нужно записать
 .
(8.54)
.
(8.54)
Параметр
![]() ,
характеризующий максимальное относительное
изменение частоты несущего сигнала
,
характеризующий максимальное относительное
изменение частоты несущего сигнала![]() ,
в этом случае называютиндексом
модуляции.
,
в этом случае называютиндексом
модуляции.
При фазовой модуляции изменению подвергается фаза модулируемого сигнала. В этом случае
![]() ,
где
,
где![]() .
(8.55)
.
(8.55)
Спектры ЧМ – и ФМ
– сигналов даже в случае тональной
модуляции подобны спектру, показанному
на рис. 8.7, д,
т.е. имеют множество боковых частот.
Однако, при малых значениях индексов
модуляции
![]() и
и![]() все они приближаются к спектру АМ-сигнала,
показанному на рис. 8.7,в
.
все они приближаются к спектру АМ-сигнала,
показанному на рис. 8.7,в
.
Применение модуляции позволяет повысить пропускную способность каналов связи, так как по одному каналу можно передавать несколько сигналов, разнесенных по частоте. При этом частотная и фазовая модуляции способствуют повышению помехозащищенности и помехоустойчивости передаваемых сигналов, так как частота и фаза в значительно меньшей степени подвержены воздействию помех, чем амплитуда сигнала.
При последующей
обработке модулированного сигнала
полоса пропускания частот соответствующего
устройства
![]() должна превышать значение
должна превышать значение![]() ,
где
,
где![]() - полоса частот модулирующей функции
- полоса частот модулирующей функции![]() .
.
Возможна смешанная модуляция, при которой изменению подвергается не один, а два и более параметров модулируемого сигнала [2].
В качестве модулятора
можно использовать мост переменного
тока (рис. 8.8). В этом случае модулирующим
сигналом является измерительный сигнал
![]() ,
модулируемым сигналом - напряжение
питания моста
,
модулируемым сигналом - напряжение
питания моста![]() ,
а модулированным сигналом – напряжение
,
а модулированным сигналом – напряжение
![]() в измерительной диагонали моста. Это
напряжение составляет часть напряжения
питания моста, зависящую от значений
сопротивлений плеч моста
в измерительной диагонали моста. Это
напряжение составляет часть напряжения
питания моста, зависящую от значений
сопротивлений плеч моста![]() и сопротивления нагрузки
и сопротивления нагрузки![]() (внутреннего сопротивления указателя
Ук).
(внутреннего сопротивления указателя
Ук).
Если какое - либо
из сопротивлений плеч моста (на рис. 8.8
- сопротивление
![]() )
зависит от измеряемой величины
)
зависит от измеряемой величины![]() ,
то напряжение
,
то напряжение![]() также зависит от
также зависит от![]() .
Если
.
Если![]() ,
то
,
то
![]() .
(8.56)
.
(8.56)
В случае, когда
![]() - сопротивление индуктивного преобразователя
перемещений с переменной величиной
воздушного зазора, можно записать [29]
- сопротивление индуктивного преобразователя
перемещений с переменной величиной
воздушного зазора, можно записать [29]
![]() ,
(8.57)
,
(8.57)
где
![]() - начальное сопротивление преобразователя;
- начальное сопротивление преобразователя;![]() -
постоянный коэффициент, зависящий от
параметров преобразователя;
-
постоянный коэффициент, зависящий от
параметров преобразователя;![]() - измеряемое перемещение.
- измеряемое перемещение.

Рис. 8.8.
Подставляя (8.57) в
(8.56) , для равноплечего моста (у которого
при
![]()
![]() )
получим
)
получим
![]() .
(8.58)
.
(8.58)
При малых перемещениях
выполняется соотношение
![]() .
В этом случае вместо (8.58) можно записать
.
В этом случае вместо (8.58) можно записать
![]() ,
(8.59)
,
(8.59)
т.е. мост осуществляет перемножение сигнала напряжения питания и измерительного сигнала.
Если в измеряемом
перемещении присутствует постоянная
составляющая
![]() ,
т.е., если
,
т.е., если![]() и
и![]() ,
то
,
то
![]() .
(8.60)
.
(8.60)
При синусоидальном напряжении питания это выражение совпадает с выражением (8.51). Поэтому выходной сигнал моста переменного тока является АМ-сигналом.
Таким образом, в случае АМ – модуляции модулятор можно рассматривать как линейную систему с переменными параметрами , а в случаях ФМ – и ЧМ – модуляции - как нелинейную систему также с переменными параметрами. Во всех случаях осуществляется преобразование спектра модулирующего сигнала. Однако в первом случае это связано с нестационарностью системы, то во втором случае – еще и с ее нелинейностью.
В качестве несущего
сигнала можно использовать импульсный
сигнал периода
![]() .
В этом случае вместо (8.50) нужно записать
(см. (7.6))
.
В этом случае вместо (8.50) нужно записать
(см. (7.6))
![]() ,
(8.61)
,
(8.61)
где
![]() - базовый импульс несущего сигнала.
- базовый импульс несущего сигнала.
При модуляции такого сигнала различают амплитудно-импульсную (АИМ), частотно-импульсную (ЧИМ), фазо-импульсную (ФИМ) и широтно-импульсную (ШИМ) модуляцию. Применяют также кодо-импульсную (КИМ), фазо-манипулированную и другие виды модуляции [2].
Для восстановления
модулирующей функции
![]() модулированный сигнал
модулированный сигнал![]() можно подать на вход нелинейного элемента
НЭ и полученный на его выходе сигнал
можно подать на вход нелинейного элемента
НЭ и полученный на его выходе сигнал![]() пропустить через фильтр низкой частоты
ФНЧ (рис. 8.9).
пропустить через фильтр низкой частоты
ФНЧ (рис. 8.9).
Такое преобразование сигнала называется детектированием, а устройство, осуществляющее это преобразование, – демодулятором.


а б
Рис. 8.9.
Характеристика
НЭ может быть ломаной «линейной»
![]() (кривая 1 на рис. 8.9,б)
или гладкой квадратичной
(кривая 1 на рис. 8.9,б)
или гладкой квадратичной
![]() (кривая 2 на рис. 8.9,б
).
(кривая 2 на рис. 8.9,б
).
Если
![]() ,
то в случае амплитудной модуляции сигнал
на выходе НЭ имеет вид
,
то в случае амплитудной модуляции сигнал
на выходе НЭ имеет вид
![]() .
(8.62)
.
(8.62)
Раскладывая функцию
![]() в ряд Фурье (см.(7.35)), получим
в ряд Фурье (см.(7.35)), получим
![]() .
(8.63)
.
(8.63)
Если частота
несущего колебания
![]() значительно превышает полосу частот
модулирующей функции
значительно превышает полосу частот
модулирующей функции![]() ,
то на выходе ФНЧ получается сигнал,
пропорциональный измерительному сигналу
,
то на выходе ФНЧ получается сигнал,
пропорциональный измерительному сигналу![]() .
.
При квадратичном детектировании вместо (8.63) имеем
![]() .
(8.64)
.
(8.64)
Видно, что «линейное» детектирование является предпочтительным, так как в этом случае выходной сигнал демодулятора и модулирующая функция связаны друг с другом линейной зависимостью.
8.4.2. Дискретизация, квантование и кодирование
Дискретизация, квантование и кодирование являются составными частями аналого-цифрового преобразования (АЦП). Такие преобразования всегда присутствуют в цифровых ИУ и выполняются в них автоматически .
Дискретизацией
называется преобразование непрерывной
(аналоговой) величины в дискретную
величину. В результате дискретизации
аналогового сигнала
![]() (рис. 8.10,а)
получают решетчатый (дискретный) сигнал
(рис. 8.10,а)
получают решетчатый (дискретный) сигнал
![]() (рис. 8.10,в).
Его значения совпадают со значениями
сигнала
(рис. 8.10,в).
Его значения совпадают со значениями
сигнала
![]() в дискретные моменты времени
в дискретные моменты времени![]() ,
где
,
где![]() - целое число,
- целое число,![]() - шаг дискретизации. В остальные моменты
времени значения дискретного сигнала
равны нулю.
- шаг дискретизации. В остальные моменты
времени значения дискретного сигнала
равны нулю.
Такое преобразование (дискретизацию) можно описать формулой
![]() ,
(8.65)
,
(8.65)
где
![]() -
дельта - функция. Обычно применяют
дискретизацию с постоянным шагом
-
дельта - функция. Обычно применяют
дискретизацию с постоянным шагом![]() .
.
На практике
импульсы, образующие дискретный сигнал,
имеют конечную длительность
![]() . Соответствующий процесс дискретизации
можно описать структурной схемой,
показанной на рис. 8.10,б.
Здесь используются импульсный элемент
(ключ), работающий с частотой дискретизации
. Соответствующий процесс дискретизации
можно описать структурной схемой,
показанной на рис. 8.10,б.
Здесь используются импульсный элемент
(ключ), работающий с частотой дискретизации
![]() и
формирователь импульсов с передаточной
функцией
и
формирователь импульсов с передаточной
функцией![]() .
.


Рис. 8.10.
Квантованием
называется процесс дискретизации
сигнала по уровню (рис. 8.11). При квантовании
аналогового сигнала
![]() диапазон его возможных значений
диапазон его возможных значений![]() разбивается на
разбивается на![]() интервалов (квантов) точками
интервалов (квантов) точками![]() (рис. 8.11,а).
Любое значение сигнала
(рис. 8.11,а).
Любое значение сигнала
![]() ,
принадлежащее интервалу
,
принадлежащее интервалу![]() ,
округляется до величины
,
округляется до величины![]() ,
называемой уровнем квантования. Шаг
квантования
,
называемой уровнем квантования. Шаг
квантования![]() может быть постоянным, как показано на
рис. 8.11 или переменным.
может быть постоянным, как показано на
рис. 8.11 или переменным.
Операцию квантования
можно описать структурной схемой,
показанной на рис. 8.11, б.
Здесь используется нелинейный
безынерционный элемент (квантователь)
со ступенчатой характеристикой
![]() ,
которую можно записать в виде
,
которую можно записать в виде
 ,
(8.66)
,
(8.66)
где
![]() ,
,![]() -
единичная ступенчатая функция.
-
единичная ступенчатая функция.
На выходе квантователя
происходит округление преобразуемого
сигнала до значения соответствующего
уровня квантования
![]() .
Возникающая при этом погрешность
округления называетсяшумом
квантования.
Если уровень квантования выбран в
середине каждого интервала (как это
показано на рис. 8.11, б),
то наибольшее значение этой погрешности
равно
.
Возникающая при этом погрешность
округления называетсяшумом
квантования.
Если уровень квантования выбран в
середине каждого интервала (как это
показано на рис. 8.11, б),
то наибольшее значение этой погрешности
равно
![]() .
В этом случае шум квантования можно
считать центрированным случайным
процессом с дисперсией
.
В этом случае шум квантования можно
считать центрированным случайным
процессом с дисперсией![]() (см. (7.82)). При равномерном квантовании
величина кванта равна
(см. (7.82)). При равномерном квантовании
величина кванта равна![]() .
Поэтому чем больше число
.
Поэтому чем больше число![]() ,
тем меньше шум квантования.
,
тем меньше шум квантования.




Рис. 8.11.
Сигнал, дискретизированный по времени и квантованный по уровню, называется цифровым сигналом.
Цифровым
кодированием
называется получение числового
эквивалента квантованной величины в
виде комбинации цифр (кода). В системе
счисления с основанием
![]() цифровой эквивалент числа
цифровой эквивалент числа![]() равен
равен
![]() ,
(8.67)
,
(8.67)
где
![]() - разрядные коэффициенты (целые числа
от 0 до
- разрядные коэффициенты (целые числа
от 0 до![]() );
);![]() - основание системы счисления;
- основание системы счисления;![]() - количество разрядов в цифровом коде.
Например, число 5 в двоичном коде (для
которого
- количество разрядов в цифровом коде.
Например, число 5 в двоичном коде (для
которого![]() )
запишется в виде 101, так как для этого
числа
)
запишется в виде 101, так как для этого
числа
![]() .
.
Чем меньше шаг
квантования
![]() ,
тем больше количество разрядов
,
тем больше количество разрядов![]() .
.
8.4.3. Фильтрация
Фильтрацией называется преобразование сигнала, целью которого является получение нужных спектральных характеристик этого сигнала. Такое преобразование используется при выделении (обнаружении) сигнала на фоне помех, уменьшении динамических искажений сигнала и пр. Оно осуществляется с помощью частотно-избирательных цепей, называемых электрическими фильтрами.
В измерительной технике используются аналоговые, цифровые и цифро-аналоговые (комбинированные) фильтры. Аналоговые фильтры строятся на аналоговых элементах, цифровые – на дискретных элементах, цифро-аналоговые фильтры содержат и те и другие элементы. В настоящее время цифровые фильтры являются более универсальными и эффективными, чем аналоговые, что обусловлено бурным развитием микросхемотехники, резким повышением быстродействия и снижением габаритов имеющихся компонентов. Поэтому происходит постепенный переход от традиционных аналоговых фильтров к цифровым фильтрам. Вместе с тем аналоговые фильтры сохраняют свое применение и эффективность при решении широкого круга задач предварительной обработки сигналов.
Основы теории и расчета цифровых фильтров рассматриваются в учебном пособии [7]. Для их расчета можно использовать характеристики аналогового прототипа цифрового фильтра: передаточную функцию, весовую функцию, частотные характеристики и пр.
Среди аналоговых фильтров различают пассивные и активные фильтры.
Пассивные фильтры
не имеют активных элементов (усилителей)
и строятся в виде частотно-избирательных
![]() цепей. Примером пассивного фильтра
является резонансный контур, с помощью
которого выделяется (пропускается)
часть спектра сигнала, расположенная
в полосе пропускания частот контура.
цепей. Примером пассивного фильтра
является резонансный контур, с помощью
которого выделяется (пропускается)
часть спектра сигнала, расположенная
в полосе пропускания частот контура.
Активные фильтры
строятся с использованием операционных
усилителей (ОУ), что исключает ослабление
измерительного сигнала и обеспечивает
удобство настройки параметров и
характеристик фильтра. Наиболее широкое
применение получили активные
![]() фильтры. Они строятся путем каскадного
соединения типовых
фильтры. Они строятся путем каскадного
соединения типовых![]() цепей, содержащих ОУ.
цепей, содержащих ОУ.
По виду
амплитудно-частотной характеристики
фильтры делятся на фильтры нижних частот
(ФНЧ), фильтры высоких частот (ФВЧ),
полосно-пропускающие фильтры (ФПП),
фильтры – пробки (ФП), резонансные
фильтры (ФР), гребенчатые фильтры (ФГ),
полосно-заграждающие фильтры (ФПЗ) и
всепропускающие фильтры (ФВП). В название
фильтра обычно входит тот диапазон
частот преобразуемого сигнала, который
фильтр пропускает: ФНЧ – фильтр,
пропускающий низкие частоты сигнала,
ФВЧ – фильтр, пропускающий высокие
частоты сигнала, ФПП – фильтр, пропускающий
гармонические составляющие сигнала в
заданной полосе частот
![]() ,
ФП – фильтр, не пропускающий гармонической
сигнал заданной частоты
,
ФП – фильтр, не пропускающий гармонической
сигнал заданной частоты![]() и т.д.
и т.д.
Все перечисленные типы фильтров можно построить с помощью фильтра нижних частот. Например, для получения ФВЧ можно из преобразуемого сигнала вычесть выходной сигнал ФНЧ. Для построения ФПЗ можно соединить последовательно ФНЧ и ФВЧ, имеющие необходимые значения параметров. Для получения ФПП можно использовать параллельное соединение таких фильтров и т.д. Поэтому при построении активных фильтров в качестве базового фильтра используется фильтр нижних частот.
При проектировании аналоговых фильтров должны учитываться следующие требования [11]:
Минимальное число пассивных элементов.
Минимальное число ОУ (минимальная потребляемая мощность)
Минимальная чувствительность характеристик фильтра к нестабильности пассивных элементов
Минимальное произведение «усиление – чувствительность», что позволяет снизить требования к качеству используемых ОУ
Простота настройки параметров
Минимальный разброс номиналов схемы фильтра.
Этим требованиям в значительной степени удовлетворяют фильтры Баттерворта и фильтры Чебышева с передаточной функцией
 ,
(8.68)
,
(8.68)
а также фильтры Кауэра с передаточной функцией вида
 ,
(8.69)
,
(8.69)
где
![]() - частота среза (верхняя граница полосы
пропускания частот);
- частота среза (верхняя граница полосы
пропускания частот);![]() - постоянные коэффициенты, влияющие на
форму АЧХ фильтра.
- постоянные коэффициенты, влияющие на
форму АЧХ фильтра.
Передаточные
функции звеньев фильтров высоких частот
можно получить из (8.68) и (8.69) заменой
комплексной переменной
![]() на
на![]() .
.
Выбирая значения
коэффициентов
![]() ,
схемы фильтров и число каскадов, можно
получить необходимые характеристики
фильтра [11].
,
схемы фильтров и число каскадов, можно
получить необходимые характеристики
фильтра [11].
Контрольные вопросы
Поясните смысл понятия “измерительное преобразование».
Приведите примеры линейного и нелинейного, стационарного и нестационарного, инерционного и безынерционного, аналогового и дискретного преобразований. Поясните отличия этих преобразований.
Поясните постановку и методы решения основной задачи динамики ИУ.
Поясните порядок решения основной задачи динамики ИУ методом интегрирования дифференциального уравнения ИУ (Приложение 5, задача 8.1).
Поясните порядок решения основной задачи динамики ИУ методом интеграла наложения (Приложение 5, задача 8.1).
Поясните порядок решения основной задачи динамики ИУ спектральным методом. Приведите пример решения такой задачи (задача 8.1).
Поясните порядок решения основной задачи динамики ИУ методом пространства состояний. Приведите пример решения такой задачи.
Поясните порядок решения основной задачи динамики ИУ операционным методом (задача 8.1).
Напишите формулу, связывающую плотности распределения вероятностей случайных сигналов на входе и выходе безынерционного ИУ, имеющего заданную функцию преобразования. Приведите пример расчета с использованием этой формулы (Приложение 5, задача 8.2).
Напишите формулы, связывающие спектрально-корреляционные характеристики стационарных случайных сигналов на входе и выходе линейного инерционного ИУ, имеющего заданную передаточную функцию. Приведите пример расчета с использованием этих формул (задача 8.3).
Поясните назначение модуляции измерительного сигнала. Назовите виды модуляции и их отличительные признаки.
Приведите пример амплитудного модулятора измерительного сигнала.
Каково назначение демодуляции измерительного сигнала ? Поясните структурную схему и работу демодулятора сигнала.
Поясните назначение, схему и работу дискретизатора сигнала.
Поясните назначение, схему и работу квантователя сигнала.
Приведите пример кодирования сигнала.
Каково назначение фильтрации измерительного сигнала ? Назовите виды фильтров и поясните их отличие.