

2.3. Структуры приборов и систем
Любое ИУ осуществляет преобразование входного сигнала в выходной сигнал . При отсутствии возмущений и в случае динамического режима измерений связь между этими сигналами описывается дифференциальным (в общем случае нелинейным) уравнением вида
, (2.1)
где - время, производные функций и порядков и соответственно. Примером такого уравнения является уравнение (5.1). В случае статического режима измерений дифференциальное уравнение (2.1) преобразуется в алгебраическое уравнение .
На практике выходной сигнал ИУ зависит не только от измеряемой величины и скорости ее изменения во времени, но также от неинформативных параметров объекта измерений и собственных параметров ИУ , которые в свою очередь зависят от влияющих величин . Кроме этого, он зависит от потребляемой мощности и мощности , передаваемой последующим преобразователям, а также от уровня внешних и внутренних аддитивных помех. Как показано ниже, все они могут быть заменены эквивалентными аддитивными помехами и , действующими соответственно на входе и выходе ИУ (см. раздел 9.2.4). Поэтому для реальных условий измерений уравнение (2.1) имеет вид
. (2.2)
Отсюда следует, что, осуществляя преобразование измерительного сигнала, ИУ должно обеспечивать выделение (фильтрацию) измеряемой физической величины, независимость (инвариантность) результата преобразования от влияющих величин, стабильность (неизменность) характеристик, незначительное влияние на объект измерений и нечувствительность к подключению внешних устройств. Выполнение этих требований во многом зависит от структурной схемы создаваемого ИУ.
Различают ИУ (и структурные схемы ИУ) с типовым и комбинированным соединениями звеньев. К типовым относятся структурные схемы с последовательным, параллельным и встречно - параллельным соединениями звеньев (рис. 2.4). Все остальные структурные схемы ИУ считаются схемами с комбинированным соединением звеньев.
При последовательном соединении звеньев выход каждого предыдущего звена является входом для соответствующего последующего звена (рис. 2.4, а). При параллельном соединении звеньев выходной сигнал ИУ является результатом суммирования выходных сигналов всех звеньев, имеющих общий вход (рис. 2.4, б). Это суммирование является алгебраическим, т.е. выполняется с учетом знаков слагаемых, которые указываются на входах сумматора (на рис. 2.4., б все знаки положительные). В зависимости от этих знаков параллельное соединение звеньев может быть согласным (рис. 2.4, в) или встречным (рис. 2.4, г). В первом случае выходные сигналы звеньев ИУ суммируются, во втором – вычитаются. Встречно-параллельное соединение звеньев отличается наличием обратной связи. Эта связь может быть положительной или отрицательной. В первом случае входным сигналом звена прямой связи (звена 1 на рис. 2.4, д) является сумма входного сигнала и выходного сигнала звена обратной связи (звена 2), т.е. , во втором - разность этих сигналов (см. рис. 2.4, е).

Рис. 2.4.
Наиболее широкое применение в измерительной технике получили ИУ с последовательным соединением звеньев. Однако, используя такие ИУ, сложно добиться высокой точности измерений. Схемы с параллельным согласным соединением звеньев применяют для повышения чувствительности ИУ. Схемы с параллельным встречным соединением используют при создании дифференциальных ИУ. В этом случае кроме повышения чувствительности становятся возможными компенсация синфазных помех и повышение линейности функции преобразования ИУ. Схемы с положительной обратной связью используют в генераторах сигналов и автогенераторных ИУ, например – в частотных датчиках с механическими резонаторами. Применение отрицательной обратной связи позволяет стабилизировать характеристики ИУ и используется повсеместно.
На рис. 2.5 показана обобщенная структурная схема измерительного прибора. В конкретном приборе некоторые элементы этой схемы могут отсутствовать.

Рис. 2.5.
С помощью предварительного преобразователя ПП измеряемая физическая величина , характеризующая состояние объекта измерений ОИ, подводится к датчику первичной информации Д . Выходной сигнал датчика подается на устройство первичной обработки сигнала УПОС, в котором с помощью промежуточных ИПр осуществляются необходимые преобразования измерительного сигнала: селекция, масштабирование, модуляция, фильтрация, коррекция, нормализация и пр. Выходной сигнал УПОС поступает на вычислительное устройство ВУ. В нем формируется (вычисляется) оценка измеряемой величины , которая выводится на отсчетное устройство ОУ и используется потребителем информации ПИ.
Для повышения точности измерений могут использоваться локальные и(или) общая обратные связи (на рис. 2.5 показаны пунктиром). С помощью вспомогательных элементов ВЭ обеспечиваются выполнение условий нормального функционирования прибора (освещение шкалы, сигнализация, вентиляция и пр.), контроль и восстановление работоспособности, защита от нежелательных воздействий внешней среды, формирование тестовых сигналов, обеспечение необходимым электрическим питанием и ресурсами.
Современные интеллектуальные приборы строятся с учетом принципов адаптации, самообучения, самоконтроля и самоуправления. В таких приборах с помощью системы адаптации СА осуществляются изменения структуры и режимов работы прибора, обеспечивающие приспособление к изменениям условий эксплуатации. С помощью системы управления СУ осуществляется взаимодействие компонентов прибора и управление процессом измерений.
Объектом измерений могут быть физический процесс, биологический объект, среда, поле и пр. Поэтому измеряемая физическая величина в общем случае может характеризовать множество параметров объекта измерений, т.е. является векторной, изменяющейся во времени и пространстве. Среда С является источником нежелательных климатических, механических, радиационных и других внешних воздействий. Их состав и уровень характеризуют условия измерений. Вычислительное устройство может быть встроенным или автономным, аналоговым или цифровым, программируемый или с жесткой логикой и т.д. Отсчетное устройство может быть цифровым, стрелочным, индикаторным, панельным, проекционным и т.д.
Совокупность элементов, обеспечивающих получение сигнала , образует измерительный канал ИК, имеющий нормированные метрологические характеристики. Таких каналов может быть несколько.
Обобщенная структурная схема информационно-измерительной системы (ИИС) аналогична структурной схеме прибора, показанной на рис. 2.5. Основное отличие состоит в том, что ИИС может содержать множество измерительных каналов. Конкретная структурная схема ИИС представляется совокупностью связанных друг с другом функциональных блоков (ФБ), интерфейсных устройств (ИФУ) и устройств управления (УУ). В зависимости от характера этих связей различают ИИС с цепочечной, радиальной и магистральной структурами [24].
На рис. 2.6 показаны основные одноступенчатые структуры ИИС: а – цепочечная структура, в которой управление работой каждого последующего ФБ производится после окончания преобразования в соответствующем предыдущем ФБ; б – радиальная структура, в которой управление работой ФБ ведется централизованно от одного УУ; в - магистральная структура с централизованным управлением; г – магистральная структура с децентрализованным управлением . Одинарными стрелками показаны технические связи, двойными – информационные связи.
Кроме этих схем используют многопетлевые магистральные структуры со сложными связями. При большом количестве ФБ сложная ИИС разбивается на несколько подсистем. Такие ИИС называются многоступенчатыми. Различают также ИИС последовательного действия (одноканальные), параллельного действия (многоканальные), комбинированные и мультиплицированные [24].
В соответствии с рис. 2.5, ИУ можно рассматривать как цепь элементов, осуществляющих необходимые преобразования измерительного сигнала. Такие цепи делятся на цепи прямого и уравновешивающего преобразования, причем последнее может быть компенсационным, следящим или программным (развертывающим) , а также статическим или астатическим.

Рис. 2.6.
ИУ прямого преобразования состоят из нескольких элементов, соединенных последовательно и(или) параллельно согласно (см. рис. 2.4, а,б). Если измеряемых величин несколько , то выходной сигнал ИУ является функцией этих величин (рис. 2.7, а). В зависимости от временной последовательности преобразований ИУ бывают с одновременным и разновременным (в том числе периодическим) вводом сигналов (рис. 2.7, б). К ним могут относиться не только измерительные (зависящие от измеряемой величины), но и образцовые или тестовые сигналы, что используется для повышения точности измерений (см. раздел 9.3.7).
ИУ уравновешивающего преобразования отличаются наличием обратной связи. Если обратная связь вводится в промежуточную точку ИУ (рис. 2.7, в), то преобразование, осуществляемое такой схемой, называется уравновешивающим компенсационным преобразованием, если обратная связь заводится непосредственно на вход ИУ (рис. 2.7, г), - то уравновешивающим следящим преобразованием. В ИУ программного уравновешивающего преобразования уравновешивающий сигнал поступает на вход сравнивающего устройства от специального генератора сигнала, задающего программу уравновешивания.




Рис. 2.7.
В
последние годы активно применяются
структурные методы повышения точности
измерений, основанные на принципе
многоканальности [14]. В этом случае ИУ
имеет два или несколько измерительных
каналов и вычислительное устройство
ВУ, в котором осуществляется вычисление
результата измерений. На рис. 2.8 показаны
структурные схемы двухканальных
инвариантных
ИУ прямого преобразования. Такие ИУ
предназначены для измерения одной
физической величины
![]() и подвержены воздействию одного
возмущения
и подвержены воздействию одного
возмущения![]() .
.
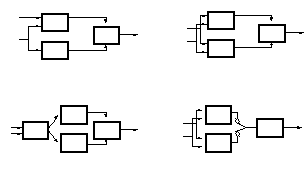
Рис. 2.8.
Инвариантность
выходной величины ИУ
![]() к возмущению
к возмущению![]() достигается путем создания двух
измерительных каналов
,
и обработки их выходных сигналов
в вычислительном устройстве
.
Алгоритм вычислений таков, что их
результат
не зависит от возмущения
достигается путем создания двух
измерительных каналов
,
и обработки их выходных сигналов
в вычислительном устройстве
.
Алгоритм вычислений таков, что их
результат
не зависит от возмущения
![]() ,
а зависит только от
,
в частности – совпадает с
.
,
а зависит только от
,
в частности – совпадает с
.
В
ИУ, построенном согласно структурной
схеме рис. 2.8, а,
измеряемая величина
![]() воздействует на канал
,
а канал
воспринимает только возмущение
воздействует на канал
,
а канал
воспринимает только возмущение
![]() ,
которое действует на оба канала.
Преобразования сигналов в таком ИУ
можно описать тремя уравнениями
,
которое действует на оба канала.
Преобразования сигналов в таком ИУ
можно описать тремя уравнениями
, , , (2.3)
где
- функции преобразования каналов;
- функция преобразования вычислителя
(алгоритм вычислений);
![]() -
результат вычислений, не зависящий от
возмущения
-
результат вычислений, не зависящий от
возмущения![]() .
Например, если
,
а
,
то
.
Например, если
,
а
,
то
. (2.4)
Коэффициенты и заносятся в память ВУ и их стабильность влияет на погрешность измерений. Описанный способ построения инвариантного ИУ в измерительной технике является наиболее распространенным. Примером такого ИУ является полудифференциальный индуктивный преобразователь, входящий в состав датчика давления на рис. 2.2, а.
В ИУ, построенном согласно структурной схеме рис. 2.8, б, измеряемая величина и возмущение действуют одновременно на оба измерительных канала, имеющих разные функции преобразования. В этом случае вместо (2.3) нужно записать
, , , (2.5)
Например, если и , то
. (2.6)
Если и , то . Примером такого ИУ является дифференциальный индуктивный соленоидный преобразователь перемещения, входящий в состав датчика давления на рис. 2.2, б.
В
дифференциальных ИУ с разделенными
измерительными каналами часто бывает
сложно обеспечить идентичность реакций
каналов на возмущение
![]() ,
что приводит к частичной компенсации
этого возмущения. В ИУ, построенном
согласно схеме рис. 2.8,в,
измерительные каналы имеют общий
чувствительный элемент (ЧЭ). Это помогает
добиться необходимой идентичности
реакций измерительных каналов на
возмущение. Однако при таком способе
построения ИУ может усиливаться взаимное
влияние каналов друг на друга. Примером
такого ИУ является дифференциальный
датчик давления, показанный на рис.
2.2,б.
,
что приводит к частичной компенсации
этого возмущения. В ИУ, построенном
согласно схеме рис. 2.8,в,
измерительные каналы имеют общий
чувствительный элемент (ЧЭ). Это помогает
добиться необходимой идентичности
реакций измерительных каналов на
возмущение. Однако при таком способе
построения ИУ может усиливаться взаимное
влияние каналов друг на друга. Примером
такого ИУ является дифференциальный
датчик давления, показанный на рис.
2.2,б.
В ИУ, построенном по схеме рис. 2.8, г, используется временное разделение каналов. В этом случае вход вычислителя поочередно подключается к выходам измерительных каналов, имеющих разные характеристики. В таких ИУ используются тестовые методы повышения точности измерений (см. раздел 9.3.7).