

Глава 2. Принципы построения приборов и систем
2.1. Классификация приборов и систем
Современные приборы и системы широко применяются в жизни людей. В зависимости от их назначения различают измерительные, информационные, управляющие, регистрирующие, контрольные, испытательные, технические, наблюдательные и другие приборы и системы (табл. 2.1).
Таблица 2.1
Назначение приборов и систем
|
№
|
Название |
Назначение |
|
1 |
Измерительные |
Измерение физических величин, исследование объектов, распознавание образов, диагностика |
|
2 |
Информационные |
Обнаружение объектов, информирование, сигнализация, накопление, обработка информации |
|
3 |
Контрольные |
Установка принадлежности объекта контроля заданному классу объектов, учет |
|
4 |
Управляющие |
Управление объектами, регулирование процессов, , навигация, координация действий |
|
5 |
Регистрирующие |
Регистрация (запись) процессов, передача данных |
|
6 |
Испытательные |
Проведение испытаний устройств, объектов, продукции |
|
7 |
Наблюдательные |
Наблюдение за объектами и процессами, охрана объектов |
|
8 |
Технические |
Повышение качества жизни (безопасности и пр.) |
В зависимости от физического принципа действия различают электрические, механические, электромеханические, пневматические, оптические, электронные, оптико-электронные и другие приборы и системы, в зависимости от области их применения - авиационные, теплотехнические, медицинские, навигационные, транспортные, геодезические, судовые, промышленные, бытовые, специального назначения и другие .
Все приборы и системы содержат в своем составе устройства, с помощью которых одна физическая величина (принимаемая за входной сигнал) преобразуется в другую физическую величину (выходной сигнал). Такие устройства обычно имеют нормированные характеристики, т.е. выполняют необходимое преобразование в рамках установленных норм. В измерительных приборах и системах они называются измерительными устройствами (ИУ).
Согласно [17], измерительным устройством называется часть измерительного прибора (установки или системы), связанная с измерительным сигналом и имеющая обособленную конструкцию и назначение.
Основной функцией ИУ является преобразование величины, подаваемой на его вход, в сигнал, несущий информацию о свойствах этой величины. Поэтому к ИУ относится широкий круг средств измерений, включая измерительные приборы (ИП) и измерительные преобразователи (ИПр). Частично в него входят измерительные системы (ИС) и измерительные установки (ИУс) (рис. 2.1). Рассмотрим их подробнее.

Рис. 2.1.
Измерительным прибором называется средство измерений, предназначенное для получения значения измеряемой физической величины в установленном диапазоне [17].
Отличительным признаком измерительного прибора является то, что его показания должны быть доступны для непосредственного восприятия потребителем информации, т.е. он всегда должен иметь устройство индикации (стрелочное, цифровое или иное), с которого непосредственно снимается показание.
По способу преобразования измерительного сигнала различают ИП прямого действия (прямого преобразования) и ИП сравнения (уравновешивающего преобразования). В ИП прямого действия измеряемая величина испытывает ряд последовательных измерительных преобразований, в результате которых она «доводится» до показания ИП. Погрешность таких ИП равна сумме погрешностей всех их звеньев . Поэтому для достижения высокой точности измерений все звенья таких ИП должны обладать высокой точностью. В результате ИП прямого действия уступают приборам уравновешивающего преобразования по точности. Однако такие приборы обладают более простой конструкцией и высоким быстродействием. Поэтому они часто встречаются на практике.
В ИП уравновешивающего преобразования значение измеряемой величины определяют на основе ее сравнения с мерой, которая хранится в ИП или воспроизводится в нем с помощью отрицательной обратной связи. В таких ИП погрешности звеньев, охваченных обратной связью, оказывают меньшее влияние на общую погрешность измерений, чем в ИП прямого преобразования. Поэтому с помощью ИП уравновешивающего преобразования можно осуществлять прецизионные измерения. Недостатком таких ИП является более сложная конструкция и возможность потери устойчивости.
В зависимости от топологии обратной связи различают компенсационные и следящие ИП. В первом случае обратная связь «заводится» в промежуточную точку (внутрь) ИП, во втором – непосредственно на вход ИП. Благодаря этому следящие ИП отличаются более высокой точностью, однако, как правило, имеют более сложную конструкцию.
В зависимости от способа формирования сигнала обратной связи различают ИП с ручным, автоматическим и программным уравновешиванием. В ИП с ручным уравновешиванием сигнал обратной связи создается потребителем информации. В ИП с автоматическим уравновешиванием этот сигнал формируется автоматически. В ИП программного уравновешивания он поступает от специального устройства, задающего программу уравновешивания.
В зависимости от значения сигнала уравновешивания в установившемся режиме измерений различают ИП астатического и статического уравновешивания. В ИП астатического уравновешивания этот сигнал равен нулю, в ИП статического уравновешивания – отличен от нуля.
По характеру вычислений, необходимых для получения результата измерений различают суммирующие и интегрирующие приборы, а также приборы с вычислением сложной функции. Суммирующими называют приборы, в которых результат измерений образуется в результате суммирования его отдельных составляющих (например, суммирующий расходомер). Принцип действия интегрирующих ИП основан на использовании операции интегрирования (например, интегрирующий гироскоп). В ИП с вычислением сложной функции для формирования результата измерений используются сложные вычисления. В настоящее время такие приборы оснащаются встроенными микропроцессорами и микроконтроллерами. Благодаря этому становятся возможными реализация сложных алгоритмов вычислений и выполнение других необходимых функций: управление процессом измерений, адаптация к условиям измерений и пр. Такие приборы называются интеллектуальными. По уровню сложности и принципам структурной организации они приближаются к ИС и ИУс.
По способу индикации значения измеряемой физической величины ИП делятся на показывающие и регистрирующие. В показывающих ИП допускается только считывание показаний, в регистрирующих – их запись на бумажную ленту, магнитный носитель и пр., т.е. документирование и хранение результатов измерений. По способу записи показаний различают самопишущие и печатающие приборы. Если устройство индикации расположено на значительном расстоянии (дистанции) от объекта измерений, то соответствующие приборы называются дистанционными.
В зависимости от особенностей эксплуатации различают настенные, настольные, напольные, лабораторные, полевые, бортовые и другие приборы.
По виду выходного сигнала ИП делятся на аналоговые, цифровые и аналого-цифровые. Показание аналоговых ИП является непрерывной функцией измеряемой величины, т.е. при бесконечно малом изменении этой величины изменяется столь же мало. Такие приборы обычно имеют стрелочное или самопишущее отсчетное устройство. Показания цифровых ИП представляются в цифровом виде. В них автоматически осуществляются дискретизация, квантование и кодирование измерительного сигнала. Благодаря этому цифровые ИП имеют ряд преимуществ по сравнению с аналоговыми приборами. Основные из них следующие: процесс измерения в цифровых ИП автоматизирован, цифровая форма показаний исключает субъективные ошибки измерений, связанные с неточным отсчетом показаний, возможна автоматическая обработка промежуточных результатов с целью исключения погрешностей вплоть до указания погрешности при каждом измерении . Благодаря этому стрелочные ИП постепенно заменяются цифровыми приборами. Вместе с тем цифровая форма показаний не всегда удобна для потребителя информации. Например, при цифровом отсчете высоты полета сложно прогнозировать изменение этой высоты в процессе управления движением летательного аппарата. По этой же причине спидометры автомобилей обычно оснащают стрелочной шкалой. Поэтому, несмотря на возможность цифровой индикации, цифровые приборы часто снабжают стрелочным отсчетным устройством.
Нужно ясно понимать, что аналого-цифровое преобразование измерительного сигнала является источником дополнительной погрешности измерений. Поэтому высокая точность цифровых ИП обеспечивается не столько этим преобразованием, сколько теми дополнительными возможностями обработки измерительных сигналов, которые появляются благодаря цифровой форме их представления.
Измерительным преобразователем называется средство измерений, предназначенное для выработки сигнала измерительной информации в форме, удобной для передачи, дальнейшего преобразования, обработки и/или хранения, но не доступной для непосредственного восприятия наблюдателем [17].
Измерительные преобразователи (ИПр) составляют техническую основу всех средств измерений. Подобно атомам и молекулам, являющимся основой любого вещества, ИПр являются базовыми элементами всех приборов и систем.
По виду преобразуемых величин различают измерительные преобразователи электрических величин в электрические, электрических – в неэлектрические, неэлектрических – в электрические и неэлектрических в неэлектрические. Примерами первых могут служить делители напряжения и тока, измерительные трансформаторы, измерительные усилители, нормирующие преобразователи и пр.; примерами вторых – измерительные механизмы электроизмерительных приборов, электроприводы и пр.; примерами третьих – датчики неэлектрических величин и, наконец, примерами четвертых – упругие элементы приборов, передаточно-множительные механизмы и пр.
В зависимости от места в измерительном канале различают предварительный, первичный, промежуточные и выходной ИПр . Первичным называют ИПр, к которому с помощью предварительного ИПр «подводится» измеряемая физическая величина. Обычно этим ИПр является чувствительный элемент ИУ.
Совокупность ИПр, осуществляющих преобразование измеряемой величины в первичный электрический сигнал, называется датчиком первичной информации. Обычно датчик представляет собой отдельный конструктивный узел, который размещается на объекте измерений или вблизи него. Он правильно выполняет свою функцию («дает» измерительный сигнал), если для этого созданы все необходимые условия: подведено электрическое питание, выполнены требования по монтажу, обеспечена защита от нежелательных воздействий и пр.
Датчик и предварительный преобразователь в наибольшей степени подвержены воздействию неблагоприятных факторов объекта измерений и окружающей среды . Поэтому погрешность измерительного прибора в основном зависит от наличия предварительного преобразователя и погрешностей датчика.
В свою очередь, погрешности датчика зависят от физического принципа действия и состава его элементов, а также от конструкции датчика. Поэтому выбор физического принципа действия, состава используемых ИПр и конструкции датчика – наиболее важные задачи проектирования прибора .
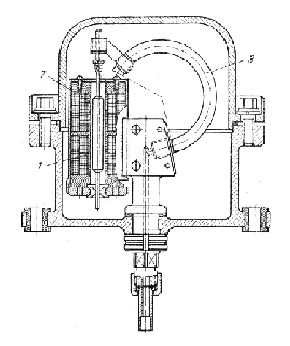
В качестве примера на рис. 2.2 показаны два варианта конструкции индуктивного датчика давления.

а б
Рис. 2.2
В
датчике на рис. 2.2, а
при изменении давления контролируемой
среды
![]() изменяется зазор между мембраной М и
сердечником
3
полудифференциального индуктивного
преобразователя. В результате изменяется
индуктивность рабочей катушки
преобразователя 1.
Катушка 2
служит для компенсации влияющих факторов.
Соединение датчика с последующими
преобразователями осуществляется через
электрический разъем 4.
В таком датчике первичным ИПр (и
чувствительным элементом прибора)
является мембрана М, а предварительным
ИПр – трубопровод, соединяющий датчик
с объектом измерений (на рис. 2.2, а
не показан). Если трубопровод отсутствует
(датчик ввертной), то предварительный
преобразователь также отсутствует.
изменяется зазор между мембраной М и
сердечником
3
полудифференциального индуктивного
преобразователя. В результате изменяется
индуктивность рабочей катушки
преобразователя 1.
Катушка 2
служит для компенсации влияющих факторов.
Соединение датчика с последующими
преобразователями осуществляется через
электрический разъем 4.
В таком датчике первичным ИПр (и
чувствительным элементом прибора)
является мембрана М, а предварительным
ИПр – трубопровод, соединяющий датчик
с объектом измерений (на рис. 2.2, а
не показан). Если трубопровод отсутствует
(датчик ввертной), то предварительный
преобразователь также отсутствует.
В датчике на рис. 2.2, б чувствительным элементом является трубка Бурдона 3, с помощью которой давление контролируемой среды преобразуется в перемещение якоря 1 дифференциального соленоидного индуктивного преобразователя 2. При отсутствии трубопровода этот ИПр также является первичным. Использование дифференциального индуктивного соленоидного преобразователя способствует снижению погрешностей прибора.
На выходе датчика получают первичный сигнал (как правило, электрический), удобный для последующих преобразований, обработки и(или) хранения. С помощью промежуточных ИПр выполняются дальнейшие преобразования этого сигнала с целью получения результата измерений. Используют различные виды промежуточных ИПр. Преобразователи, предназначенные для пропорционального изменения входного сигнала в нужное число раз, называются масштабными или масштабирующими ИПр. Примерами таких ИПр являются делитель напряжения, усилитель, трансформатор и пр. Преобразователи, предназначенные для дистанционной передачи измерительного сигнала (например, сельсины), называются передающими ИПр. Преобразователи, осуществляющие преобразование входной величины в нормированный выходной сигнал, называются нормирующими ИПр. Преобразователи, осуществляющие необходимое функциональное преобразование измерительного сигнала, называются функциональными ИПр и т.д.
Вспомогательные элементы прибора выполняют функции, не имеющие непосредственное отношение к преобразованию измерительного сигнала, например освещение шкалы, вентиляцию, термостатирование, экранирование, виброзащиту и пр. Такие элементы не входят в схему измерительного канала. Однако устранение любого из них ухудшает качество ИУ.
Вспомогательные элементы ИП могут заметно влиять на точность измерений. Например, погрешность измерения массового расхода методом переменного перепада давления зависит от результатов измерения температуры и плотности контролируемой среды, которые получают с помощью вспомогательных средств измерений. Это справедливо для всех ИУ, реализующих косвенный метод измерений.
В зависимости от характера энергетического взаимодействия с объектом измерений различают генераторные и параметрические ИПр.
Генераторные ИПр для формирования измерительного сигнала используют энергию объекта измерения. Поэтому такие ИПр не нуждаются в источнике питания. Это не означает, что приборы, использующие генераторные ИПр, вовсе не имеют источников питания, так как в них могут присутствовать другие элементы, нуждающиеся в электрическом питании, например, усилитель, вспомогательные элементы и пр. Примерами генераторных ИПр являются термопара, пьезоэлемент, турбинка, упругие элементы приборов, некоторые разновидности электрохимических датчиков, индукционные преобразователи и пр. Выходным сигналом таких ИПр являются эдс, электрический заряд, механическое перемещение, напряжение или ток, зависящие от измеряемой величины.
Параметрические ИПр, напротив, нуждаются в источнике энергии. В результате их взаимодействия с объектом измерений изменяются собственные параметры преобразователя (электрические, механические, электроакустические и др.), что приводит к изменению информативного параметра сигнала на выходе специальной схемы, называемой схемой включения ИПр. Разумеется, при этом также происходит взаимодействие ИПр с объектом измерений, однако энергия измерительного сигнала, полученного в результате этого взаимодействия, является частью энергии источника питания схемы включения преобразователя, а не объекта измерений. Наиболее широкое распространение получили омические (резистивные), емкостные и индуктивные ИПр. С их помощью измеряемая величина преобразуется соответственно в изменение активного сопротивления, электрической емкости и индуктивности. Известно большое число схем включения таких преобразователей. Наиболее распространенные из них рассматриваются в разделе 2.5.
Необходимость стабильного электрического питания может ограничивать область применение параметрических ИПр, так как влияет на их автономность, т.е. возможность длительно выполнять свои функции без потребления ресурсов.
Нередко приходится измерять параметры таких объектов, о которых невозможно непосредственно получить необходимую информацию, например, координаты пространственно удаленных объектов, сведения о составе и внутренней структуре материалов, изделий и пр. В этих случаях для получения измерительного сигнала можно «облучать» объект измерений сигналом, передаваемым от прибора. Отраженный сигнал несет в себе информацию об измеряемых параметрах объекта измерений. Такие ИУ называют радиационными.
В зависимости от степени взаимодействия ИПр с объектом измерений различают бесконтактные и контактные ИПр. В первом случае возмущения, вносимые измерительным преобразователем в объект измерений несущественные, во втором – подлежат обязательному учету, особенно при оценке погрешности измерений. Например, если для измерения перемещений объекта необходимо закрепить на нем отражающее зеркало, то размеры и масса этого зеркала могут влиять на движение объекта. В этом случае оптические ИПр, используемые при измерении, нельзя считать бесконтактными. Контактные ИПр имеют непосредственный контакт с объектом измерений.
В зависимости от способа построения различают одноканальные и многоканальные ИПр. В первом случае ИПр содержит один физический вход и один выход, во втором – несколько входов и(или) выходов. Примерами ИПр с двумя входами и одним выходом являются сумматоры, сравнивающие устройства, мостовые схемы с двумя активными плечами и пр., с одним входом и двумя выходами – дифференциальные ИПр и пр.
При построении математической модели ИУ входами и выходами ИПр считаются параметры его входного и выходного сигналов. Среди этих параметров различают информативные и неинформативные параметры. Первые зависят от измеряемой физической величины, вторые – от нее не зависят, однако могут влиять на показание ИУ. Многоканальность позволяет достичь инвариантности (независимости) показаний ИУ от этих (неинформативных) параметров.
В зависимости от выполнения принципа суперпозиции ИПр делятся на линейные и нелинейные. В линейных ИПр принцип суперпозиции выполняется, а в нелинейных ИПр – нет. Отличительными признаками линейного ИПр являются линейность его статической характеристики и линейность его дифференциального уравнения.
По виду информативного параметра выходного сигнала различают амплитудные, цифровые и частотные ИПр. Информативными параметрами выходных сигналов таких ИПр являются соответственно амплитуда, цифровой код и частота сигнала. Амплитудные ИПр первыми стали применяться на практике. В настоящее время им на смену приходят цифровые ИПр, позволяющие непосредственно на выходе получать кодовый сигнал. Частотные ИПр занимают промежуточное место, совмещая в себе простоту, свойственную аналоговым ИПр с точностью и помехозащищенностью, характерными для цифровых ИПр. Благодаря этому измерение физических величин путем их преобразования в частоту является одним из наиболее перспективных направлений развития измерительной техники.
Измерительная установка – это совокупность функционально объединенных и расположенных в одном месте средств измерений и вспомогательных устройств, предназначенная для измерения одной или нескольких физических величин [17].
Измерительную установку (ИУс), применяемую для поверки, называют поверочной установкой, входящую в состав эталона – эталонной установкой и т.д. Некоторые большие ИУс называют измерительными машинами, например, установки для контроля геометрических размеров и взаимного расположения элементов сложных деталей и узлов, измерения удельного сопротивления электротехнических материалов, испытания магнитных материалов, неразрушающего контроля сложных изделий и пр. Создание ИУс, называемых также измерительными стендами, позволяет наиболее рационально расположить все требуемые средства измерений и соединить их с объектом измерений так, чтобы обеспечить наиболее высокую производительность труда на данном рабочем месте.
Измерительная система – это совокупность функционально объединенных средств измерений и вспомогательных средств, размещенных в разных точках контролируемого объекта с целью измерения одной или нескольких физических величин, свойственных этому объекту и выработки измерительных сигналов в разных целях [17].
В зависимости от назначения измерительные системы разделяют на собственно измерительные, информационные, информационно-измерительные, измерительные контролирующие, измерительные управляющие и др. Такие системы помимо измерительных задач решают задачи сбора и хранения информации, контроля, диагностики, идентификации, управления и т.д.
Отличительной особенностью информационно-измерительных систем (ИИС) является многоканальность и обязательное наличие в их составе вычислительных устройств, используемых для обработки и хранения больших массивов измерительной информации.
С помощью систем автоматического контроля устанавливают соответствие между состоянием объекта контроля и заданной нормой. Отклонение от нее обнаруживается в результате сравнения контролируемых параметров объекта с нормой. При этом нет необходимости выводить потребителю значения этих параметров. Поэтому системы автоматического контроля часто называются контрольно-измерительными системами. В качестве примера системы автоматического контроля можно привести систему контроля радиационной обстановки на АЭС. С помощью систем технической диагностики устанавливают факт и причину нарушения работоспособного состояния объекта (технического, биологического и др.), а также осуществляют автоматический поиск и устранение неисправности. Системы распознавания образов служат для автоматического выявления объекта (предмета, процесса, явления, ситуации, сигнала) на основе сравнения его характеристик с характеристиками заранее выделенного класса объектов (образа). Системы передачи информации (например, телеметрическая система) служат для передачи сигналов (команд) от оператора или центра управления к объектам управления. В зависимости от удаленности элементов таких систем различают распределенные и сосредоточенные ИС. Сосредоточенные ИС не содержат протяженных линий связи и располагаются в ограниченных пределах.
Близкими к ИИС являются измерительно-вычислительные комплексы (ИВК) и управляющие системы (САУ).
Измерительно-вычислительным комплексом называется функционально объединенная совокупность средств измерений, ЭВМ и вспомогательных устройств, предназначенная для выполнения в составе измерительной системы конкретной измерительной задачи. Примерами авиационных ИВК являются пилотажные, навигационные и другие системы, решающие задачи измерения воздушно-скоростных параметров, определения координат и траектории движения, опознавания объектов, управления огневыми средствами и т.д. [18].
Основной задачей управляющих систем является изменение одного или нескольких параметров объекта управления с целью установления требуемого режима его работы. Сложные САУ могут содержать в своем составе различные подсистемы, в том числе ИС, ИВК и другие разновидности ИИС.
Прогресс измерительной техники неразрывно связан с научно-техническим прогрессом. Первое поколение ИИС (начало 60-х годов) создавалось в целях централизованного контроля промышленный объектов и автоматизации научных исследований на релейно-контактной, а затем на дискретной полупроводниковой технике. Второе поколение ИИС (70-е годы) отличалось переходом к решению задач адресного сбора и программной обработки измерительной информации на базе специализированных ЭВМ типа «КАМАК», «ДНЕПР» и др. Третье поколение ИИС строится с использованием развитого программно-алгоритмического обеспечения, унифицированных блоков и элементов, с использованием уникальных достижений в области цифровой обработки сигналов. Поэтому современные ИИС обладают большой гибкостью, позволяющей на базе одних и тех же аппаратных средств решать большое число разнообразных задач.