1 Выбор алгоритмической структуры системы автоматического регулирования заключается
ввыборе…
АФункциональных элементов и их характеристик.
В Структуры системы автоматического регулирования. С Параметров настроек типовых регуляторов.
2 Выбор оптимальных настроек регуляторов методом незатухающих колебаний относят к
…
А Точным методам. В Случайным методам.
СПриближенным методам.
3 При выборе оптимальных настроек ПИ-регулятора рабочая частота определяется как…
А ωр = 0,8 ωп.
В ωр = ωп.
С ωр = 1,2 ωп,
где ωп – частота, соответствующая пропорциональному закону регулирования.
4 Точка, соответствующая оптимальным настройкам ПД-регу-лятора, расположена на кривой заданной степени колебательности в плоскости параметров настройки регулятора S2 – S1:
А Слева от максимума. В В вершине.
С Справа от максимума.
5 Каким интегральным критерием оценивается качество регулирования в методе РАФХ расчета оптимальных параметров настроек регуляторов?
А Линейным интегральным критерием. В Модульным интегральным критерием.
С Квадратичным интегральным критерием.
6 Из скольких этапов складывается расчет оптимальных параметров настроек регуляторов для ПИ- и ПД-регуляторов?
А Из одного. В Из двух. С Из трех.
7 В графоаналитическом методе расчета оптимальных параметров настроек регуляторов считается, что обеспечен заданный запас устойчивости, если АФХ разомкнутой системы и окруж-
ность радиуса r =
M
с центром на отрицательной вещественной полуоси l =
M 2
…
M 2 −1
M 2 −1
А Пересекаются. В Касаются.
С Не заходят друг на друга.
8 При каком значении коэффициента передачи Kп, который не известен, строится АФХ разомкнутой системы?
А Kп = 0. В Kп = 1.
С Kп = Kоб.
9 Если показатель колебательности M = 1,62, то коэффициент передачи равен…
А Kп = 1/r.
В Kп = r.
С Kп = 1/r + 1.
10 При расчете оптимальных настроек параметров И-регулятора постоянная времени Tр выбирается…
А Tр = 1.
В Произвольно.
СTр = Tоб.
Ча с т ь 2 НЕЛИНЕЙНЫЕ СИСТЕМЫ
10ХАРАКТЕРИСТИКА НЕЛИНЕЙНЫХ СИСТЕМ
Всистемах автоматического управления различают два вида нелинейностей: статические и динамические.
Статические нелинейности – это нелинейности статических характеристик (рис. 10.1). Выходная переменная статических нелинейных звеньев в каждый момент времени зависит только от значений входной переменной в тот же момент времени и не зависит от того, как эта входная переменная изменялась до рассматриваемого момента времени. Таким образом, вход и выход нелинейного звена (рис. 10.1, а) связаны между собой нелинейной статической характеристикой y = f (x) .
Динамические нелинейности – это нелинейности дифференциальных уравнений, описывающих звено, например, (y′(t))2 = kx(t) .
В наиболее распространенных случаях нелинейные свойства системы в основном определяются наличием в системе статических нелинейностей. Поэтому рассматриваемый класс нелинейных систем ограничим нелинейностями только статического вида.
x
нелинейный
y
а)
элемент
y
б)
y
в)
y
г)
b
x
x
- b
x
y
д)
y
е)
y
ж)
b
b
f2
–a
a
x
f1
x
–a
a
x
–b
–c
Рис. 10.1 Статические характеристики нелинейных элементов:
а – структурная схема нелинейного элемента; б, в – непрерывные однозначные статические характеристики; г – релейная однозначная характеристика; д, е – гистерезисные статические характеристики;
ж– опережающая статическая характеристика
10.1Особенности нелинейных систем
Различают статические нелинейности существенные и слабые. Нелинейность считается слабой, если она может быть заменена линейным элементом без изменения принципиальных особенностей системы, причем процессы в такой линеаризованной системе качественно не должны отличаться от процессов в реальной системе. Нелинейность является существенной, если подобная замена невозможна. В этом случае нелинейные статические характеристики являются разрывными или близкими к разрывным функциями, чаще всего они представляются в виде кусочно-линейных функций, и процессы в линеаризованной и реальной системах сильно отличаются.
Автоматические системы с существенными нелинейностями обладают рядом принципиальных особенностей, которые не присущи линейным системам и не могут быть выявлены при исследовании линеаризованного уравнения системы. Главные особенности этих систем вытекают из их неподчинения принципу суперпозиции:
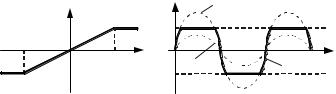
1 Колебания переходного процесса в нелинейных системах могут отличаться от входного гармонического сигнала как по форме, так и по частоте. Например, для нелинейного элемента со статической характеристикой yнэ(x) =| x | при подаче на него входного сигнала x(t) = Asin ωt выходные колебания не
являются гармоническими, они имеют совершенно другую форму и период вдвое меньший, чем период входных колебаний (рис. 10.2).
В линейных же системах при подаче на вход гармонического сигнала на выходе получаем также гармонический сигнал, но другой амплитуды и сдвинутый по фазе.
2 Как известно, в линейных системах частотные характеристики не зависят от амплитуды входного сигнала и полностью определяются свойствами системы.
yнэ
а)
yнэ
x
y(t)
б)
x
0,5 T
x(t)
t
T
Рис. 10.2 Иллюстрация отличия вынужденных колебаний нелинейного элемента от входного гармонического сигнала:
а – статическая характеристика; б – выходной сигнал нелинейного элемента
yнэ
а)
- B
B
x
x2(t)
б)
B
- B
x1(t)
yнэ(t)
t
Рис. 10.3 Зависимость частотных характеристик от амплитуды входного сигнала:
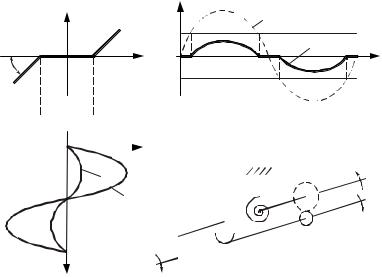
Внелинейных системах такой аппарат частотных характеристик не подходит. Здесь частотные характеристики существенно зависят от амплитуды входного сигнала, т.е. Mнэ(ω, A) , ϕнэ(ω, A) . Если рассмотреть не-
линейный элемент со статической характеристикой, представленной на рис. 10.3, а, то этот элемент при малых амплитудах входного сигнала (A ≤ B) ведет себя как линейный, а при больших амплитудах входного
сигнала (A > B) выходные колебания искажаются(рис. 10.3, б).
3 В нелинейных системах условия устойчивости зависят от величины внешнего воздействия: система устойчива при одних значениях воздействий и неустойчива при других его значениях. Здесь нельзя говорить однозначно, устойчива система или нет.
Линейная система, например, ay′(t) + y(t) = 0 , имеет одно единственное состояние равновесия (y(t) = 0) . Нелинейная система, описываемая в общем виде уравнением y(n) (t) = F (y(n−1) (t), K, y′(t), y(t)) в динамике, имеет много состояний равновесия, определяемых нелинейным уравнением F(0,0,K, y) = 0 .
Для некоторых нелинейных систем, имеющих зону нечувствительности, наблюдается континиум состояний равновесия. Таким образом, в нелинейных системах говорят только об устойчивости конкретного состояния равновесия – устойчиво оно или нет. Весь строй мышления меняется, так как при одних внешних воздействиях переходной процесс сходится, а при других расходится. В связи с этим для нелинейных систем применяют понятие "устойчивость в малом", "устойчивость в большом", "устойчивость в целом".
Система устойчива в малом, если она устойчива только при малых начальных отклонениях. Система устойчива в большом, если она устойчива при больших начальных отклонениях. Система устойчива в целом, если она устойчива при любых начальных отклонениях.
4 В нелинейных системах могут существовать собственные особые движения, получившие название автоколебаний. Автоколебания – это устойчивые собственные колебания, возникающие из-за нелинейных свойств системы при особых условиях. Режим автоколебаний принципиально отличается от колебаний линейной системы на границе устойчивости. В линейной системе малейшие изменения ее параметров приводят к изменению колебательного процесса, он становится либо сходящимся, либо расходящимся. Автоколебания являются устойчивым режимом, если малые изменения параметров системы не выводят ее из этого режима. Автоколебания могут быть и не устойчивым режимом, если малые изменения параметров системы выведут ее из этого режима. Амплитуда колебаний не зависит от начальных условий и уровня внешних воздействий.
В общем случае автоколебания в нелинейных системах нежелательны, а иногда и недопустимы. Однако, следует отметить, что в некоторых нелинейных системах автоколебания являются основным рабочим режимом.
10.2 Типовые нелинейные элементы системы управления
Структура и уравнение нелинейной автоматической системы в общем случае могут быть очень сложными. Степень сложности зависит от количества, вида и места включения нелинейных элементов. Однако, большинство реальных систем содержит один существенно нелинейный элемент. Линейная часть включает в себя все линейные звенья системы и может иметь структуру любой сложности, в частности, содержит внутренние обратные связи. Как уже отмечалось выше, нелинейные свойства системы определяются наличием в ней статических нелинейностей, т.е. нелинейная часть, образованная одним нелиней-
ным элементом, имеет выходную переменную yнэ , которая в наиболее общем случае выражается как функция входной величины x и ее производной x′:
yнэ = f (x, x ) .
(10.1)
′
Простейшими нелинейными элементами являются статические нелинейности, у которых выходная переменная зависит только от входной переменной, причем, эта зависимость строго однозначна: yнэ = f (x) . Такие нелинейности называются типовыми, для них записывается статическая характеристи-
ка и рассматривается преобразование ими гармонического сигнала x(t) = Asin ωt . Наиболее часто встре-
чаются следующие типовые нелинейности.
1 Усилительное звено с зоной нечувствительности. Статическая характеристика этого звена пред-
ставлена на рис. 10.4, а. Такими характеристиками обладают некоторые схемы электронных, магнитных и
yнэ
а)
- a
a
45°
x
yнэ
x2(t)
б)
a
yнэ(t)
- a
t
в)
г)
x
yнэ
x1
x2
x
t
Рис. 10.4 Звено с зоной нечувствительности:
а– статическая характеристика; б – прохождение гармонического сигнала;
в– входной сигнал; г – механическая модель
гидравлических усилителей в области малых входных сигналов. Простейшей механической моделью зоны нечувствительности является система соединения двух валов с пружинным возвратом ведомого вала в нейтральное положение при наличии участка свободного хода в системе передачи (рис. 10.4, г).
При подаче на вход звена гармонического сигнала x1(t) (рис. 10.4, в) с амплитудой A ≤ a , на выходе
звена сигнала не будет, так как изменение x1 не превышает величины зоны нечувствительности. Если же на вход подать сигнал x2 (t) (рис. 10.4, в) с амплитудой A > a , то на выходе будет наблюдаться периоди-
ческий сигнал (рис. 10.4, б), который может быть построен по рис. 10.4, а, в, как третья проекция. Если x2 (t) ≤ a, то yнэ(t) ≡ 0 , если x2 (t) > a, то выходной сигнал yнэ(t) совпадает с верхней частью входного сигнала x2 (t) . В результате на выходе усилительного звена с зоной нечувствительности будет выходной
сигнал, отличный от гармонического по форме и представляющий собой участки с нулевым сигналом и сигналом, отличным от нуля.
2Усилительное звено с ограничением амплитуды. Это звено называют также нелинейным звеном
сзоной насыщения. Статическая характеристика изображена на рис. 10.5, а и записывается в виде
x
при | x |≤ a ;
(10.3)
yнэ =
при | x |> a.
a signx
Подобными характеристиками обладают практически все реальные усилители, ограниченные по мощности в области больших входных сигналов.
Механической моделью звена является система соединения двух валов через упругую пружину при наличии ограничений или упоров в системе ведомого вала (рис. 10.5, г).
При подаче на вход звена гармонического сигнала x1(t) с амплитудой A < a (меньше зоны насыще-
ния) (рис. 10.5, в) на выходе звена будет также гармонический сигнал, так как в этом случае звено работает как линейное (рис. 10.5, б). Если амплитуда входного сигнала x2(t) больше, чем зона насыщения
(A > a) ,
то при достижении ее,
т.е. как
yнэ
а)
a
- a
a
- a
x
в)
x1
x
x2
t
yнэ
б)
x
yнэ
a
x1(t) = yнэ(t)
- a
t
x2(t)
г)
yнэ
x
Рис. 10.5 Усилительное звено с ограничением амплитуды:
а– статическая характеристика; б – прохождение гармонического сигнала;
в– входной сигнал; г – механическая модель
только x2 (t) = a , на выходе звена установится значение yнэ(t) = a
и будет сохраняться до тех пор, пока
x2 (t) > a . Если же значение входного сигнала достигнет значения
x2 (t) = −a , то на выходе значение вы-
ходного сигнала установится равным −a , yнэ = −a и будет сохраняться, пока
x2 (t) < −a в диапазоне
−a ≤ x2 (t) ≤ a . Нелинейный элемент имеет статическую характеристику yнэ = x и,
следовательно, в этом
случае через него пройдут отдельные участки входного гармонического сигнала. В результате на выходе усилительного звена с зоной насыщения установится периодический выходной сигнал по форме напоминающий трапеции, боковые стороны которых искривлены по синусоиде.
3 Двухпозиционное реле. Статическая характеристика звена представлена на рис. 10.6, а и записывается как
B
при x > 0;
.
(10.4)
yнэ =
при x < 0.
− B,
Двухпозиционное реле представляет собой самостоятельный нелинейный физически реализуемый элемент, который используется в различных схемах сигнализации, а также для устройств специального типа, применяемых для форсирования управляющего сигнала при больших рассогласованиях между переменной и заданием.
При подаче на вход звена гармонического сигнала x(t) (рис. 10.6, в) на его выходе установятся пря-
моугольные колебания, амплитуда которых будет B при x > 0 и −B при x < 0 . Вынужденные колебания на выходе двухпозиционного реле представлены на рис. 10.6, б.
yнэ
а)
yнэ
x
yнэ б)
В
В
- В
x
t
в)
- В
x
Рис. 10.6
Двухпозиционное реле:
а – статическаяtхарактеристика; б – прохождение
гармонического сигнала; в – входной сигнал
4 Двухпозиционное реле с зоной возврата. Однозначные релейные характеристики соответствуют некоторой идеализации реальной системы. В действительности обычно величина входного сигнала, при котором происходит скачок выходной величины yнэ , бывает различной для переключения контакта в пря-
мом и обратном направлениях. Статическая характеристика двухпозиционного реле с зоной возврата представлена на рис. 10.7, аи математически выражается следующим образом
B при − a < x < ∞;
(10.5)
yнэ =
− B, при − ∞ < x < a.
На участке −a < x < a
величина yнэ имеет два значения B или −B в зависимости от предшествующих
значений x . Условия скачка при переходе с нижней ветви на верхнюю выражается следующим обра-
зом: x = a, yнэ = −B,
dx / dt > 0 . Аналогично записываются условия скачкообразного перехода с верхней
ветви на нижнюю:
x = −a, yнэ = B, dx / dt < 0 .
При подаче на вход звена гармонического сигнала (рис. 10.7, в) на выходе звена наблюдаются прямоугольные колебания с амплитудой, равной B (рис. 10.7, б). Скачкообразный переход с +B на −B происходит в момент времени, когда x(t) = −a , а с −B на +B , когда x(t) = a . Свойствами подобного ре-
лейного элемента обладают усилители с зоной насыщения, охваченные положительной обратной связью. Такая нелинейная характеристика типична для двухпозиционных переключающих элементов, например, электромагнитных реле.
yнэ
а)
x(t) yнэ(t)
б)
В
В
а
- а
а
x
- а
t
- В
- В
в)
x
Рис. 10.7 Двухпозиционное реле с зоной возврата:
а– статическая характеристикаt ; б – прохождение гармонического сигнала; в – входной сигнал
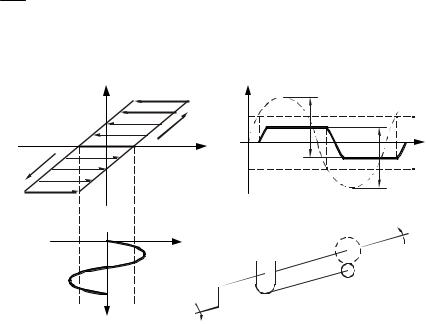
5 Усилительное звено с зоной застоя (звено типа люфт). Нелинейность такого вида наиболее час-
то встречается в механических системах и связана с наличием зазоров или с сухим трением в системе передачи. Если в механической модели звена с зоной нечувствительности (рис. 10.8, г) убрать пружину, стремящуюся возвратить ведомый вал в нулевое положение, то получится модель нелинейности типа люфт (рис. 10.8, г). Зависимость между положением ведущего x и ведомого y нэ валов неоднозначна.
Статическая характеристика, выражающая эту зависимость, представлена на рис. 10.8, а. Аналитически характеристика звена типа люфт записывается следующим образом:
dx
x − a при
dt
> 0;
yнэ =
dx
при
< 0, .
(10.6)
x + a
dt
dydtнэ = 0 при| yнэ − x |< a.
В этом случае статическая характеристика имеет гистерезисный вид и зависит не только от значения x(t) , но и от знака скорости изменения yнэ .
yнэ
а)
yнэ
в)
а
- а
2 а
t
а
x
- а
2 а
б)
г)
yнэ
x
t
x
Рис. 10.8 Звено типа люфт:
а – статическая характеристика; б – входной сигнал; в – прохождение гармонического сигнала; г – механическая модель
При подаче на вход гармонического сигнала x(t) (рис. 10.8, б) на выходе нелинейного элемента бу-
дет наблюдаться некоторый периодический процесс, представленный на рис. 10.8, в, для которого характерным является появление участков "зависания" yнэ , т.е. на них изменения yнэ не происходит за
счет наличия сухого трения в золотнике. Однако, выходной сигнал yнэ не задерживается в зоне покоя в
области нулевых значений. Это означает также, что пока входная координата не изменится настолько, чтобы она превысила значение 2a , выходная переменная не будет изменяться. Поэтому при изменении направления действия выходная переменная начнет изменяться лишь тогда, когда значение входной переменной изменится на величину, равную удвоенному параметру a (параметр a характеризует, например, сухое трение).
6 Трехпозиционное реле с зоной нечувствительности и зоной возврата. Нелинейности такого типа часто встречаются в системах автоматического регулирования, особенно, когда элементом, управляющим включением и выключением вспомогательной энергии, является электрическое реле, например, электрический сервомотор, управляемый с помощью реле.
Статическая характеристика представляет собой релейную характеристику, отличительной особенностью которой является то, что выходная переменная изменяется скачком в зависимости от изменения входного сигнала и может принимать одно из трех значений: B, 0, − B . Эта характеристика изображена
на рис. 10.9, а и является ярким примером существенно нелинейной функции. Здесь можно выделить три типичные зоны нелинейности: зону нечувствительности, участки неоднозначности и участки насыщения.
Зона нечувствительности определяется величиной тока срабатывания реле. Участки неоднозначности представляют петли, образуемые вертикальными и горизонтальными участками характеристики, а участки насыщения определяются релейным характером включения энергии.
Математическая запись статической характеристики трехпозиционного реле с зоной нечувствительности выглядит следующим образом:
B, 0, − B .
(10.7)
В этом случае переход от yнэ = 0 к yнэ = B происходит при x = a , а возврат – при x = b .
Подобная статическая характеристика может быть получена при охвате усилителя с зоной нечувствительности и ограничением положительной обратной связью. Для ее получения может быть применена электрическая схема (рис. 10.9, г), состоящая из двух электромагнитных реле K1 и K2, включенных через вентили WS1 и WS2. Контакты
yнэ
а)
B
- b - а
x
- B
а b
б)
x
x
t
yнэ
в)
B
b
а
- а
t
- b
- B
г)
+
K1
yнэ
K2
WS1
WS2
B
K1
K1
K2
K2
K2
_
K1
Рис. 10.9 Трехпозиционное реле с зоной нечувствительности:
а – статическая характеристика; б – входной сигнал; в – прохождение гармонического сигнала; г – электрическая схема
реле K1 и K2 замыкают цепь между источником питания и напряжением B выходными зажимами так, что в зависимости от значения x напряжение z на зажимах принимает значение −B, 0, B в соответствии с
характеристикой (рис. 10.9, а).
При подаче на вход рассматриваемого нелинейного элемента гармонического сигнала (рис. 10.9, б) на выходе наблюдается периодический процесс, представляющий собой чередование участков нечувствительности и прямоугольных импульсов амплитудой B или −B . Переключение реле с B на −B и наоборот с −B на B происходит с некоторым запаздыванием в силу разных значений токов срабатывания и отпусканием реле.
10.3 Методы линеаризации
Особенности поведения нелинейных систем и многообразия протекающих в них процессов создают трудности при их математическом описании и исследовании. Во многих случаях представляется возможным и целесообразным заменить реальные нелинейные характеристики приближенными линейными зависимостями, т.е. исходная нелинейная система будет заменена некоторой линеаризованной системой. В зависимости от типа нелинейностей применяют различные методы линеаризации. Наиболее распространенными являются: для слабых нелинейностей – разложение в ряд Тейлора, для сильных нелинейностей – гармоническая линеаризация, для релейных систем – вибрационная линеаризация.
10.3.1 РАЗЛОЖЕНИЕ В РЯД ТЕЙЛОРА
Основным методом линеаризации нелинейных зависимостей является метод перехода к малым возмущениям и метод осреднения нелинейных характеристик.
Если статическая характеристика нелинейного элемента yнэ = f (x) является непрерывной функцией
с непрерывными производными в некоторой области значений x , то эта характеристика всегда может быть разложена в ряд Тейлора в окрестности любой точки x0 , принадлежащей этой области:
yнэ = f (x) = f (x0 ) + f ′(1!x0 ) ∆x + f ′′2(!x0 ) (∆x)2 +L.
Смысл линеаризации заключается в том, что при достаточно малых значениях ∆x = x − x0 можно положить, что
f (x) ≈ f (x0 ) + f ′(x0 )∆x .
yнэ
y1
Если обозначить ∆y = f (x) − f (x0 ) , то получают линеари-
B
y3
зованную статическую характеристику в отклонениях (рис.
10.10)
(10.8, а)
x
∆y = a∆x ,
- B
где
a = f ′(x0 ) , или
(10.8, б)
yнэ ≈ ax + b ,
Рис. 10.11
Гармоническая ли-
где
b = f (x0 ) − f ′(x0 )x0 .
неаризация
10.3.2 ГАРМОНИЧЕСКАЯ ЛИНЕАРИЗАЦИЯ
В теории управления в большинстве случаев приходится иметь дело с неаналитическими, разрывными и неоднозначными нелинейностями. Для характеристики особенностей подобных нелинейных элементов, как уже отмечалось выше, рассматривается прохождение через них гармонического сигнала x(t) = Asin ωt . Если система изменяет частоту входных колебаний, то она называется частотопреобразую-
щей, если нет – нечастотопреобразующей. Далее рассматриваются нечастотопреобразующие системы. На выходе безынерционного нелинейного нечастотопреобразующего элемента со статической характеристикой yнэ = f (x) установятся периодические колебания, которые можно представить как сумму гармонических
составляющих с помощью ряда Фурье (рис. 10.11), в состав которого входят гармоники
y1(t) = C1 sin(ω0t + ϕ1) ;
y3 (t) = C3 sin(3ω0t + ϕ3) и т.д.
Частота ω0 называется главной частотой. Если на выходе нелинейного элемента рассматривать
только первую гармонику, а остальные во внимание не принимать, то получим некоторый линеаризованный элемент. Такую процедуру можно проделать, если будет выполняться гипотеза фильтра.
Выходной сигнал после нелинейного элемента записывается следующим образом:
∞
yнэ(t) = a0 + ∑(ak sin kωt + bk coskωt) ,
k =1
где a0 = T20 T∫00 f (Asinωt)d(ωt) ;
2
T
ak =
∫0
f (Asinωt)sinkωt d(ωt) ;
T
0
0
T
bk =
2
∫0
f (Asin ωt) coskωt d(ωt) .
T
0
0
Согласно гипотезе фильтра все гармоники, начиная со второй, имеют достаточно малую амплитуду по сравнению с первой гармоникой и ими можно пренебречь. Тогда уравнение вынужденных колебаний на выходе запишется в виде
yнэ(t) ≈ a0 + a1 sinωt
или
yнэ(t) ≈ C1 sin(ωt + ϕ) + a0 ,
где
C =
a2
+b2
;
1
1
1
+ b1 cosωt
(10.9)
ϕ = arctg b1 . a1
Если принимать a0 = 0 , то
yнэ(t) ≈ C1 sin(ωt + ϕ) .
(10.10)
Таким образом, на вход подали гармонический сигнал и на выходе получили также гармонический сигнал (10.10). Следовательно, в рассмотрение можно ввести частотные характеристики, аналогичные частотным характеристикам линейной системы: