

Работа сау
Под действием управляющего и возмущающих воздействий в САУ возникают динамические процессы, т.е. процессы, протекающие во времени. Управляющие воздействия являются детерминированными величинами т.е. их поведение заранее известно.
F(t) – случайные величины, они подчиняются законам математической статистики.
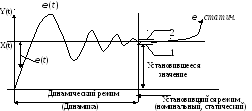
Режим работы, когда Y(t) постоянен и практически не изменяется – это номинальный режим (установившийся режим или статика).
Динамический режим или динамика.
В динамическом режиме происходит изменение во времени регулируемой величины, поэтому динамический режим описывается дифференциальными уравнениями.
На установившемся режиме Y(t)=const, поэтому уравнения статики - алгебраические уравнения.
Для того, чтобы из уравнений динамики получить уравнения статики, надо все производные в дифференциальных уравнениях приравнять к нулю.
По поведению системы на установившемся режиме различаются:
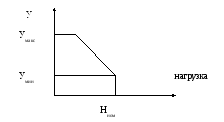
Статические системы.
Статические системы – это такие системы, у которых регулируемая величина зависит от нагрузки.
![]() - статизм системы
- статизм системы
Особенностью статистических систем является то, что они всегда работают со статической ошибкой. Статическая ошибка является принципом работы статической системы. В статической системе нет интегрирующих элементов.

Изменяя
характеристики системы, мы можем
уменьшить
(при
X(t)=1)![]() уст.,
но она никогда не будет равна 0.
уст.,
но она никогда не будет равна 0.
![]()
![]()
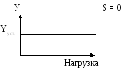
Астатические системы.
Это такие системы, у которых установившееся значение регулируемой величины не зависит от нагрузки.
Изменяя
характеристики элементов САУ, мы
изменяем, только динамику системы, а
![]() уст
всегда равна 0. (при X(t)=1)
уст
всегда равна 0. (при X(t)=1)
Особенности
астатических систем, работающих в режиме
стабилизации (когда
Yуст.
= const),
является то, что при скачкообразном
Xзад
статистическая
ошибка
![]() уст
= Xзад
– Yуст
= 0
уст
= Xзад
– Yуст
= 0
Особенностью астатических систем является наличие в них интегрирующих элементов, т.е. таких элементов, у которых выходная величина является интегралом от входной величины.

![]()

Обыкновенные линейные сау
Как отмечалось выше, под действием управляющих и возмущающих воздействий в системе возникают динамические переходные процессы.
Динамика таких систем описывается дифференциальным уравнением вида:
(1)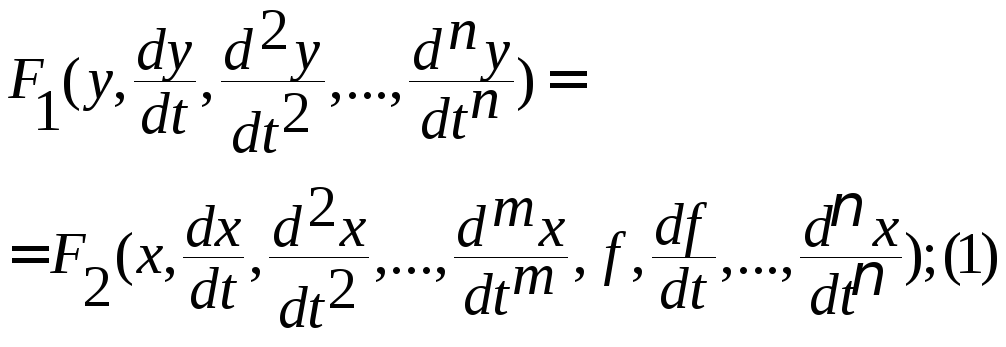

Смысл этого уравнения:
Под
действием, управляющего воздействия X
и его m
производных, а так же под действием
возмущающего воздействия f
и его
![]() производных происходит изменение
регулируемой величиныy
и ее n
производных.
производных происходит изменение
регулируемой величиныy
и ее n
производных.
Решение дифференциального уравнения (1) при заданных X , f и начальных условиях - есть переходный процесс в этой системе. Уравнение (1) может быть линейным с постоянными коэффициентами, линейным с переменными коэффициентами, нелинейным, содержать чистое (транспортное) запаздывание и т.д.
Каждый тип уравнения определяет класс САУ. Для каждого класса САУ разрабатываются свои методы исследования. Наиболее полной и простой является теория обыкновенных линейных систем. Вместе с тем с ее помощью можно решить большое количество практически важных задач.
Обыкновенными линейными системами, называются системы, динамические процессы в которых описываются обыкновенными линейными дифференциальными уравнениями с постоянными коэффициентами и все статические характеристики элементов этой системы также линейны.
Статический характеристикой называется зависимость выходной величины от входной на установившемся режиме.
T2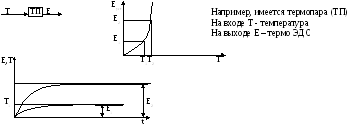
Линейность статической характеристики понимается в ограниченном смысле. Если рассматривать широкий диапазон изменения входной величины, то статические характеристики большинства элементов будут нелинейными.
Uвых.
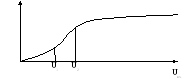
Если же входной сигнал изменяется в диапазоне от U1 до U2, то можно считать, что статическая характеристика линейна. Замена нелинейной характеристики линейной называется линеаризацией.
Динамика обыкновенных линейных систем в общем виде описывается дифференциальным уравнением вида:
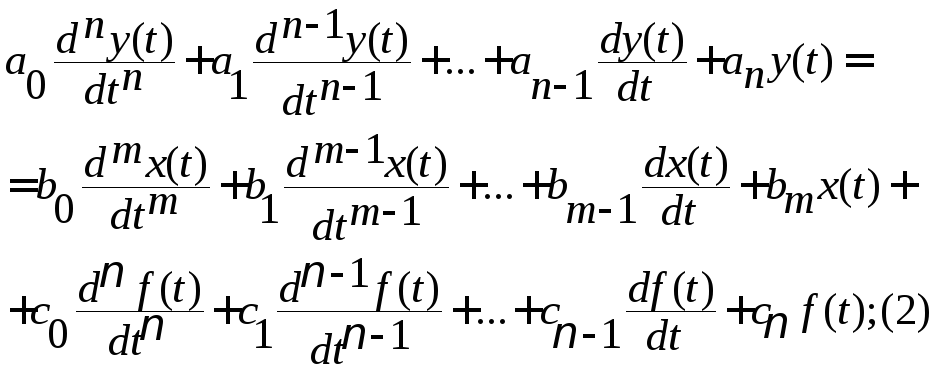
Смысл уравнения (2) такой же, как и уравнения (1).
Здесь
![]() -
любые целые положительные числа,
-
любые целые положительные числа,
![]() - постоянные коэффициенты.
- постоянные коэффициенты.