

Безопасные шины
В течение многих лет ведущие производители шин делали попытки создания шин, которые не боятся проколов. Некоторые производители (Goodyear, Michelin) выпускали бескамерные шины с несколькими герметизирующими слоями, которые очень медленно выпускали воздух в случае небольших повреждений. Другие (Dunlop, Continental) устанавливали внутри шины специальные капсулы, которые при смятии шины в результате выхода воздуха разрушались и выделяли герметизирующий состав и газ, который накачивал шину.

Рис. 61. Обозначения на боковине шины:
1 – максимальная нагрузка и давление (по стандарту США);
2 – номер ТУ; 3 – количество слоёв и тип корда каркаса и брекера;
4 – государственный знак высшей категории качества; 5 – ширина профиля;
6 – серия 70 (отношение Н/В); 7 – обозначение радиальной шины;
8 – обозначение бескамерной шины; 9 – диаметр обода (13”); 10 – индекс грузоподъёмности; 11 – индекс скорости (S – до 180 км/ч); 12 – условное обозначение износостойкости резины (по стандарту США); 13 - условное обозначение термостойкости шины (по стандарту США); 14 – условное обозначение кода завода (по стандарту США); 15 – номер сборщика;
16 – номер сертификата официального утверждения на соответствие шин Международным правилам №30 ЕЭК ООН (1247); 17 – условное обозначение кода размера ( по стандарту США); 18 – дата изготовления
(28 неделя 1987 г.); 19 – знак официального утверждения шины на соответствие Международным правилам №30 ЕЭК ООН (Е); 20 – условный номер страны, выдавшей сертификат утверждения 5 – Швеция);
21 – серийный порядковый номер шины; 22 – радиальная шина;
23 – наименование модели
Компания Michelin разработала безопасную шину “PAX”, которая действительно не боится проколов и даёт возможность автомобилю двигаться на проколотой шине около 160км со скоростью до 88км/час, сохраняя управляемость и устойчивость. Кроме повышенной безопасности эта шина обладает меньшим сопротивлением качению и меньшей деформацией при действии боковых сил, что улучшает показатели устойчивости и управляемости автомобиля.
Водитель автомобиля, оборудованного безопасными шинами, может не заметить прокола, поэтому производители таких шин требуют, чтобы на автомобили устанавливались системы предупреждающие водителя о падении давления в шинах.
Увеличить безопасность и сберечь шины могут не только описанные конструкции, но системы постоянной подкачки шин. Такие системы успешно используются на некоторых грузовых автомобилях повышенной проходимости, но они имеют довольно сложное устройство и требуют наличия постоянно работающего компрессора. Фирма Cycloid изготавливает небольшие насосы, которые устанавливают на ступицу колеса и соединяются шлангом с вентилем насоса. Такой насос приводится от вращающейся
ступицы колеса и при этом гарантированно поддерживает постоянное давление воздуха в шине. Такие насосы предназначены для грузовиков, но фирма заявляет о скором выпуске насосов и для легковых автомобилей.
1.19.. Рулевое управление
Изменить направление движения автомобиля можно двумя различными способами: за счёт поворота колёс или звеньев автомобиля в горизонтальной плоскости (кинематический способ) или за счёт создания на колёсах правого и левого борта различные по величине или по направлению продольных сил (силовой способ).
Полная классификация рулевого управления представлена на рис. 62.
Для управления большинством современных автомобилей применяется кинематический способ, который может быть реализован путём:
-поворота управляемой оси;
-поворота управляемых колёс;
-поворота сочленённых звеньев (складывания рамы).

Поворот управляемой оси – это наиболее старый из известных способов управления. При таком способе ось с колёсами поворачивалась относительно шкворня, установленного в центре повозки. Поворот управляемой оси сегодня применяется только в прицепах.
Чтобы совершить поворот без бокового скольжения колёс, все они должны катиться по дугам, описанным из центра поворота О (рис. 63), лежащего на продолжении задней оси автомобиля. При этом передние управляемые колёса должны поворачиваться на разные углы. Внутреннее по отношению к центру поворота колесо должно поворачиваться на угол αв, наружное колесо – на меньший угол αн. Это обеспечивается соединением рулевого управления в форме трапеции. Основанием трапеции служит балка 1 переднего моста автомобиля, боковыми сторонами являются левый 4 и правый 2 поворотные рычаги, а вершину трапеции образует поперечная тяга 3, которая соединяется с рычагами шарнирно. К рычагам 4 и 2 жёстко присоединены поворотные цапфы 5 колёс.
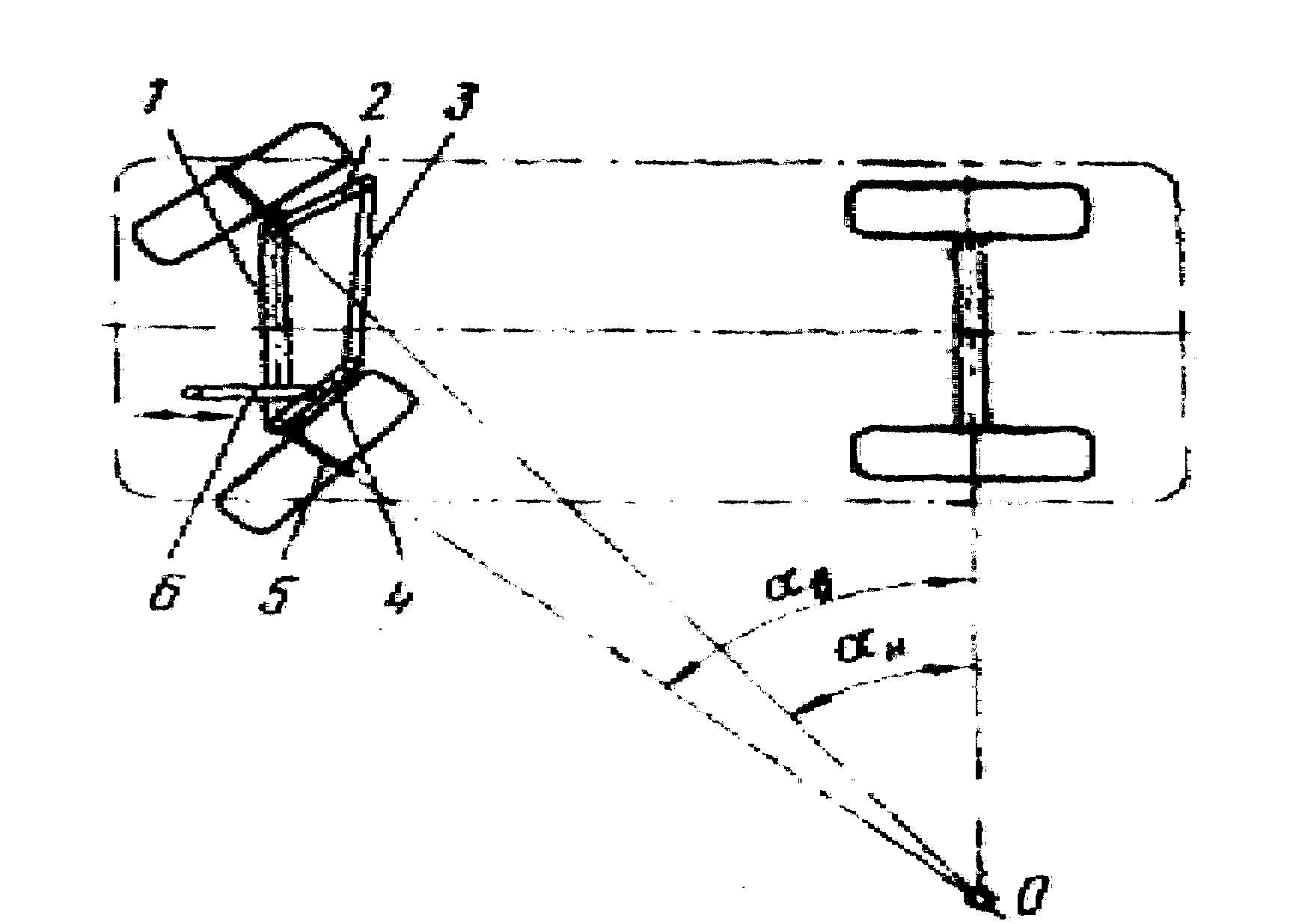
Рис. 63. Схема поворота автомобиля
Принцип управления за счёт сочленённых звеньев применяется в случае, когда колёса транспортного средства имеют большие размеры и поворот каждого из них затруднён. К недостаткам данной системы относится низкая точность управления при высоких скоростях, усложнение трансмиссии.
Наибольшее распространение в конструкции автомобиля получило рулевое управление с поворотными колёсами. В этом случае каждое управляемое колесо может поворачиваться в горизонтальной плоскости относительно собственной оси поворота. Для синхронизации правого и левого колеса одной оси они связаны шарнирным механизмом – рулевой трапецией. Рулевая трапеция обеспечивает поворот правого и левого колес на разные углы, что позволяет им катиться на повороте по разным радиусам без проскальзывания. Основные преимущества указанной схемы поворота: колёса занимают при поворотах небольшой объём внутри кузова, что позволяет удобно размещать над управляемым мостом другие агрегаты автомобиля; для поворота колёс требуются незначительные усилия.
Рулевой механизм (рис. 64) состоит из рулевого колеса 3, рулевого вала 2 и рулевой передачи 1, состоящей из зацепления червячной шестерни 1 червяка с зубчатым сектором, на вал которого крепится сошка 9 рулевого привода.
Поворот управляемых колёс происходит при вращении рулевого колеса 3, которое через вал 2 передаёт вращение рулевой передаче 1. При этом червяк передачи, находящейся в зацеплении с сектором, начинает перемещать сектор вверх или вниз по своей нарезке. Вал сектора приходит во вращение и отклоняет сошку 9, которая своим верхним концом насажена на выступающую часть вала сектора.

Рис. 64. Схема рулевого управления
Отклонение сошки передаётся продольной тяге 8, которая перемещается вперёд или назад. Продольная тяга 8 связана через верхний рычаг 7 с поворотной цапфой 4, поэтому её перемещение вызывает поворот левой поворотной цапфы. От левой поворотной цапфы усилие поворота через нижние рычаги 5 и поперечную тягу 6 передаётся правой цапфе. Таким образом, происходит поворот обоих колёс.
Управляемые колёса поворачиваются рулевым управлением на ограниченный угол, равный 28 – 350. Ограничение вводится для того, чтобы исключить при повороте задевание колёсами подвески или кузова автомобиля.
Двухосный автомобиль имеет, как правило, одну переднюю ось с управляемыми колёсами. Иногда для улучшения маневренности такие автомобили снабжают всеми управляемыми колёсами, но при этом усложняется конструкция рулевого управления и возникают проблемы с управляемостью на высоких скоростях. Поэтому на автотранспортных средствах с передними и задними управляемыми колёсами при движении с высокими скоростями принудительное управление задними колёсами отключают, а колёса фиксируются в нейтральном положении.
Рулевое управление автомобилей с поворотными колёсами включает в себя следующие элементы:
- рулевое колесо с рулевым валом;
- рулевой механизм;
- рулевой привод.
Рулевой механизм представляет собой механический редуктор, его основная задача – увеличение приложенного к рулевому колесу усилия водителя, необходимого для поворота управляемых колёс.
Рулевой привод представляет собой систему тяг и шарниров, связывающих рулевой механизм с управляемыми колёсами.