

Виноград(Вектор_управ_АД)321стр
.pdfОсновным недостатком синусоидальной ШИМ, формируемой методом сравнения, является невысокий коэффициент использования напряжения питания. Он определяется соотношением
Uлm = 23 Ud ,
где U лm — максимальное значение амплитуды линейного выходного
напряжения инвертора. Реальное значение выходного напряжения инвертора будет еще ниже из-за ограничения минимальной величины импульсов управления инвертором.
С целью повысить коэффициент использования напряжения применяются так называемые модифицированные ШИМ, отличающиеся от базовой синусоидальной ШИМ наличием блока предварительной модуляции (предмодуляции). В состав этого блока (рис.7.3) входят генератор сигнала предмодуляции и три сумматора этого сигнала с задающими воздействиями на входах системы управления. Одним из эффективных и вместе с тем относительно несложных в реализации способов предмодуляции является предмодуляция путем введения третьей гармоники в сигналы задания с амплитудой
Uпm = 16U zm′ .
Рис.7.3. Схема блока предмодуляции
Иллюстрация данного способа представлена на рис.7.4. Использование предмодуляции позволяет повысить коэффициент
использования напряжения в режиме максимального неискаженного выхода теоретически до 1 (U лm =Ud ) и снизить величину пульсаций электромагнитного момента и тока статора на 10—12 %.
101

Рис.7.4. Предмодуляция сигнала третьей гармоники |
Общими недостатками формирования ШИМ путем сравнения сигналов управления с опорным являются:
1)ориентация на реализацию средствами аналоговой элементной базы;
2)повышенная сложность реализации при необходимости получить высокий коэффициент использования источника питания;
3)недостаточная гибкость для синтеза оптимальных законов коммутации ключей инвертора в различных режимах работы привода.
Указанных недостатков лишен векторный метод формирования ШИМ.
7.2. Принципы построения векторных широтно-импульсных модуляторов
Методология построения векторных модуляторов базируется на векторном представлении совокупности выходных напряжений инвертора и ориентирована на микропроцессорную реализацию.
Первоначально предположим, что ключи инвертора напряжения, относящиеся к одной фазе нагрузки, работают строго в противофазе и переключаются мгновенно. В этом случае инвертор можно представить в виде трех двухпозиционных ключей (рис.7.5), каждый из которых подключает соответствующую фазу нагрузки либо к положительному, либо к отрицательному полюсу источника постоянного напря-
жения Ud в зависимости от трехмерного вектора входных сигналов
управления. Всего имеется 23 =8 возможных состояний ключей инвертора. Векторы выходных напряжений инвертора, соответствующие
102

всем возможным его состояниям, представлены на векторной диаграммеr r рис.7.6. Имеется шесть значащих (отличных от нуля) векторов
U1...U6
фаз нагрузки к отрицательному либо к положительному полюсу источника.
Эти векторы будем называть образующими векторами. В случае симметрии нагрузки все ненулевые образующие векторы имеют одинаковые амплитуды:
U1 =U2 =U3 =U4 =U5 =U6 = 23Ud .
Каждый вектор однозначно характеризуется своим трехразрядным двоичным кодом состояния.
|
r |
Uэкв |
U1(100) |
|
U2 (110) |
α |
U6 (101) |
Ud |
|
|
U8(111) |
|
|
U7 (000) |
|
|
|
|
|
|
Ur3(010) |
|
U5(001) |
U у(U уa,U уb,U уc ) |
|
U4 (011) |
|
Рис.7.5. Схема замещения |
Рис.7.6. Векторная диаграмма |
||
инвертора напряжения |
выходных напряжений инвертора |
||
Под алгоритмом формирования выходного напряжения инвертора будем пониматьr последовательность включения образующих векторов
напряжения Uk , k =1...8
соотношениямиr . Введем понятие вектора эквивалентного напряжения
инвертора Uэкв , представляющего собой вектор выходного напряже-
ния, усредненного на временном интервале дискретности управления инвертором. Задачей любого алгоритма является формирование в нагрузке заданного значения вектора эквивалентного напряжения. Каждый алгоритм однозначно характеризуется своей элементарной ком-
бинацией векторов напряжения Uk , формирующих элементарный
цикл переключения ключей инвертора. Весь алгоритм складывается из совокупности повторяющихся элементарных циклов.
103

Математически задачу векторного формирования алгоритма можно сформулировать в виде следующего выражения:
r |
1 |
r |
r |
|
|
U |
экв = T |
∑TiUi = ∑τiUi , |
(7.1) |
||
|
|
ц |
i |
i |
|
где Tц — период цикла модуляции (продолжительность элементарной комбинации векторов); Ui — i-й вектор, входящий в элементарную
комбинацию; Ti ,τi = Ti — абсолютная и относительная продолжи-
Tц
тельности включения i-го вектора напряжения.
Постановку задачи в виде (7.1) дополним ограничениями, следующими из физического смысла задачи:
n |
|
0 ≤Ti ≤Tц , ∑Ti =Tц , |
(7.2) |
i=1
где n — общее число векторов напряжения в элементарной комбинации векторов.
Формирование одного и того же вектора эквивалентного напряжения может осуществляться множеством различных элементарных комбинаций выходных векторов инвертора, то есть в рамках различных алгоритмов управления. При этом алгоритмы будут отличаться друг от друга следующими показателями:
-величиной пульсаций тока в фазах нагрузки;
-потерями, обусловленными дискретностью работы инвертора;
-коэффициентом использования источника напряжения;
-числом коммутаций ключей инвертора за период модуляции;
-коэффициентом использования нагрузочной способности ключей инвертора по напряжению;
-степенью симметрии управления фазами инвертора.
Критерии синтеза, полученные на основе этих показателей в большей части являются противоречащими друг другу. Синтез алгоритма (выбор элементарной комбинации векторов напряжения) может выполняться на основе требования оптимального сочетания указанных показателей, задаваемого в каждом конкретном случае с помощью весовых коэффициентов.
В общем случае задача синтеза векторных ШИМ включает следующие основные этапы:
1)предварительный анализ координат заданного вектора эквивалентного напряжения и при необходимости их ограничение для обеспечения принципиальной возможности решения задачи синтеза;
104
2)выбор состава элементарной комбинации образующих векторов для формирования заданного вектора с учетом его пространственного положения;
3)определение длительностей интервалов включения каждого из образующих векторов в пределах периода модуляции (усреднения) в соответствии с требованием равенства усредненного значения вектора напряжений инвертора заданному значению;
4)выбор порядка включения образующих векторов в элементарной комбинации и синтез сигналов управления ключами инвертора во временной области.
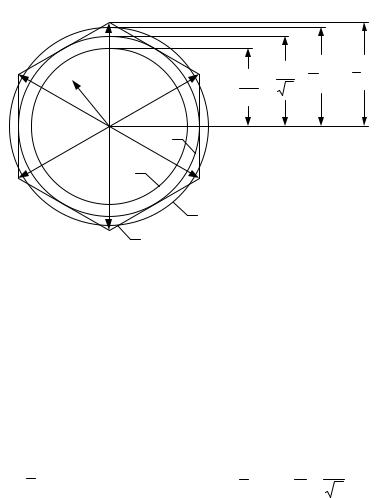
Рис.7.7. К оценке граничных режимов управления инвертором при различных вариантах ШИМ
Физические ограничения на величину заданного вектора эквивалентного напряжения легко определяются из анализа векторной диаграммы выходных напряжений инвертора (рис.7.7). Из анализа следует:
1)задача формирования заданного вектора эквивалентного напряжения
физически реализуема, если этот вектор находится в пределах шестиугольника, образованного векторами Ur1...Ur6 (линия 2);
2)предельное значение модуля формируемого вектора является функцией его углового положения: оно максимально на границах секторов ( 23Ud ) и минимально в их середине ( 23Ud cos π6 = U3d );
105

3)при векторной модуляции по синусоидальному закону амплитуда фазного напряжения ограничена значением U s.ф.гр = U3d (линия 3).
Для сравнения векторной модуляции с другими способами формирования сигналов на выходе инвертора на рис.7.7 показан также годограф граничного вектора при традиционной синусоидальной ШИМ с
пилообразным опорным сигналом (окружность 4 с радиусом Ud  2 ) и
2 ) и
годограф основной гармоники вектора фазных напряжений при шестиступенчатом алгоритме управления без ШИМ (окружность 1 с радиу-
сом 2Ud  π ).
π ).
При выборе состава элементарной комбинации векторов напряжения в векторных ШИМ типовым решением является выбор трех векторов, образующих сектор, в котором находится заданный вектор эквивалентного напряжения, двух ненулевых и одного нулевого. Это позволяет получить алгоритмы, наиболее эффективные с точки зрения указанных выше критериев. Например, треугольный алгоритм, реализующий в первом секторе векторной диаграммы напряжений элементарную комбинацию вида
 U1
U1 U2
U2 U8
U8 U2
U2 U1
U1 U7
U7 
Tц/2 Tц/2
Tц
Во втором секторе векторной диаграммы элементарная комбинация образующихr r векторов будет иметь вид
→U2 →U3 →U7 →U3 →U2 →U8 →.
Аналогичным образом элементарные комбинации формируются в других секторах. Для минимизации числа переключений инвертора последовательность включения векторов выбирается таким образом, чтобы каждый переход к новому состоянию сопровождался коммутацией только одной фазы инвертора. Именно поэтому после ненулевого
вектора U2 (110) включается нулевой вектор U8 (111) , а после ненулевого вектора U1(100) нулевой вектор Ur7 (000) .
Рассмотрим расчет продолжительности включения векторов напряжения при произвольном положении заданного вектора эквива-
106

лентного напряжения в пределах сектора. Положение заданного вектора в секторе определяется углом γu относительно оси α (рис.7.8).
Применительно к данному случаю задача заключается в поиске
решения системы алгебраических уравнений: |
|
Urz =τ1Ur1 +τ2U 2 +τ3U8 ; |
(7.3) |
τ1 +τ2 +τ3 =1 |
|
при соблюдении условий |
(7.4) |
0 ≤τ1 ≤1;0 ≤τ2 ≤1;0 ≤τ3 ≤1, |
где τr1 ,τ2r,τ3 r— относительные продолжительности включения векторов U1 ,U2 ,U8 .
U z
U2  π
π
3
τ2U2 τ1U1
Рис.7.8. К расчету продолжительностей включения векторов «треугольного» алгоритма
Данная задача относится к классу задач линейного программирования с ограничениями в форме неравенств. Для ее решения векторное уравнение системы (7.3) представим в матричном виде:
U zα |
|
U1α |
|
|
|
=τ1 |
+τ2 |
U zβ |
|
U1β |
|
cos(γu1 ) |
cos(γ |
||
=U |
|
|
sin(γ |
sin(γu1 ) |
|||
U2α = U cos(γU2β U sin(γ
u 2)) ττ1 ,
u 2 2
u1 ) u1 )
U cos(γγu 2 ) ττ1 =
U sin( u 2 ) 2
107

где U = 32Ud — модуль ненулевых образующих векторов напряже-
ния; γu1 ,γu 2 — углы поворота образующих векторов относительно
оси α.
Решая это уравнение, получим:
τ |
1 |
= |
2 1 |
|
|
sin(γu 2 ) |
|
|
− cos(γu 2 ) Uzα |
|||||||||||||||||||||||
|
|
|
3 U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos(γu1) |
|
|
. |
||||||||||
τ |
2 |
|
|
|
|
|
−sin(γu1) |
|
|
Uzβ |
||||||||||||||||||||||
Или в полярной системе координат: |
|
|
|
|
||||||||||||||||||||||||||||
τ1 |
= |
|
U z |
|
|
|
sin(γu 2 |
|
− γu ) |
|
; |
|
|
|
|
|
|
|
||||||||||||||
|
U sin(γu 2 |
|
− γu1 ) |
|
|
|
|
|
|
(7.5) |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
U z |
|
|
|
sin(γu |
|
− γu1 ) |
|
|
|
|
|
|
|
||||||||||||||
τ2 |
= |
|
|
|
|
|
; |
|
|
|
|
|
|
|||||||||||||||||||
|
|
U sin(γu 2 |
|
− γu1 ) |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
τ3 =1− (τ1 + τ2 ) . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Подставляя в (7.5) |
значения γu1 ,γu 2 , |
для абсолютных значений |
|||||||||||||||||||||||||||
продолжительностей включения образующих векторов получим: |
||||||||||||||||||||||||||||||||
t |
|
= |
|
2 |
U z |
T sin(π |
− γ |
|
); |
|
|
|
|
|
||||||||||||||||||
|
|
1 |
|
|
|
3 U |
|
|
|
ц |
3 |
|
|
|
|
|
u |
|
|
|
|
|
(7.6) |
|||||||||
|
|
|
|
|
2 |
U z |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
t |
|
= |
|
T sin γ |
|
|
|
|
|
; |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
2 |
|
|
|
3 U |
|
|
|
ц |
|
|
u |
|
|
|
|
|
|
|
|
|
|
|||||||||
t3 = Tц −(t1 +t2 ). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
Те же результаты могут быть получены из геометрических соот- |
|||||||||||||||||||||||||||||
ношений: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
τ Ur |
|
|
|
|
|
|
|
|
|
|
AB |
|
|
|
|
|
|
2 |
|
π |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
= |
AC |
= |
|
|
|
|
|
= |
|
U sin( |
− γ ); |
||||||||||||||||||
|
|
|
|
π |
|
3 |
||||||||||||||||||||||||||
|
|
1 1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
z |
|
u |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 3 |
|
|
|
|
|
|
|
|
|
|
||||||||
|
τ Ur |
|
|
= |
|
AE |
|
= |
|
AD |
|
|
= |
|
2 |
U sin(γ ). |
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
π |
|
|
|
||||||||||||||||||||||
|
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
z |
|
u |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
sin 3 |
|
|
|
|
|
|
|
|
|
|
||||||||
С учетом ограничения на минимальную ширину импульса управления фазой инвертора tmin при выполнении условия t3 < tmin значе-
ния t1 ,t2 ,t3 корректируются следующим образом:
108

t1′ = (Tц |
−tmin )t1 |
; |
|
t2′ = Tц |
t1 + t2 |
(7.7) |
|
−t1 −tmin |
|||
; |
|||
t3′ = tmin . |
|
||
Применение (7.7) позволяет получать предельные значения коэф- |
|||
фициента использования напряжения при действующих физических |
|||
ограничениях на время переключения ключей инвертора. |
|||
Тригонометрические функции, присутствующие в (7.6), могут не |
|||
вычисляться системой управления в реальном масштабе времени, а за- |
|||
даваться таблично. До начала действия ограничения на время t3 моду- |
|||
ляция выполняется по синусоидальному закону. При вступлении в |
|||
действие ограничения закон изменения Urэкв в зависимости от угла γu |
|||
отклоняется от синусоидального, что сопровождается появлением в |
|||
выходных напряжениях инвертора дополнительных низкочастотных |
|||
гармоник. |
|
||
Величина tmin |
зависит как от быстродействия силовых ключей |
||
инвертора, так и от быстродействия системы управления, осуществ- |
|||
ляющей формирование алгоритма. |
|||
Временные диаграммы импульсных сигналов управления инвер- |
|||
тором напряжения и фазных напряжений, получаемых в результате |
|||
реализации рассмотренного алгоритма векторной ШИМ, изображены |
|||
на рис.7.9. |
|
||
Рис.7.9. Временные диаграммы векторной ШИМ |
|||
109
Время включения одинаковых образующих векторов напряжения равномерно распределяется в соответствии с их числом в пределах периода модуляции. При отсчете начала периода и полупериода модуляции от центра интервала включения нулевого вектора импульсы управления оказываются расположенными симметрично относительно точек отсчета (отсюда происходит распространенное в литературе название – центрированная ШИМ). Заметим, что в силу симметрии ШИМ обновление задания вектора напряжения может выполняться один раз за полный период либо один раз за полупериод модуляции.
Импульсы управления фазами инвертора распределяются по шести его ключам с учетом формирования защитных временных задержек между коммутациями ключей одной фазы.
7.3. Понятие об асинхронных и синхронных ШИМ
Важным показателем, характеризующим алгоритм управления, является коэффициент модуляции, представляющий собой отношение частоты модуляции к частоте основной гармоники выходного напряжения инвертора:
Km = |
fm |
= |
Tu1 |
, |
(7.8) |
fu1 |
|
||||
|
|
Tm |
|
||
где Tu1 ,Tm |
— периоды основной гармоники и модуляции напряже- |
||||
ния. Для треугольной центрированной ШИМ Tm =Tц  2 .
2 .
Если в заданном диапазоне изменения частоты fu1 коэффициент модуляции принимает только целые значения, то алгоритм модуляции в этом диапазоне частот называют синхронным. Если Km при измене-
нии fu1 способен принимать дробные значения, то алгоритм модуля-
ции называют асинхронным.
Асинхронные алгоритмы наиболее просты в реализации, их частота модуляции принимается постоянной и не изменяется с изменением частоты основной гармоники напряжения. Общим недостатком таких алгоритмов является наличие в выходном напряжении инвертора субгармонических составляющих, которые появляются при дробных зна-
чениях Km . При определенных условиях они могут приводить к пол-
ной неработоспособности электропривода, проявляющейся в низкочастотных биениях его переменных. Подобные явления возникают, как правило, в частотных электроприводах, в которых отсутствует слежение за мгновенными значениями тока фаз статора. Эффект усиливает-
110