

Мартынов_силаI
.pdfu |
u02 |
|
|
u01 |
|
|
π |
ωt |
0 |
2π |
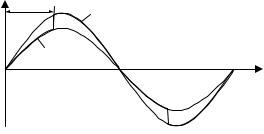
Рис. 48. Временные диаграммы, поясняющие ступенчатый способ регулирования переменного напряжения
На рис. 47 приведена схема ТРН с сетевым трансформатором и отпайкой вторичной обмотки трансформатора. Встречно-параллельно включенные тиристоры (VT1 и VT2) подключены к отпайке вторичной обмотки (точка 1). К выводу вторичной обмотки трансформатора (точка 2) подключена вторая пара встречно-параллельно включенных тиристоров (VT3 и VT4). При включенных тиристорах VT1 и VT2 на нагрузку поступает напряжение, снимаемое с выводов 0–1 трансформатора. При включении тиристоров VT3 и VT4 на нагрузку поступает напряжение, снимаемое с выводов 0–2 трансформатора, которое больше по величине напряжения, снимаемого с выводов 0–1. На рис. 48 приведены временные диаграммы, поясняющие реализацию ступенчатого способа регулирования напряжения переменного тока. Переключение обмоток 0–1 и 0–2 происходит в моменты времени пересечения кривой напряжения через ноль. Сложная конструкция трансформатора, обусловленная необходимостью наличия отпаек вторичной обмотки трансформатора и большого количества тиристоров, является недостатком этого метода регулирования.
Достоинство этого метода регулирования заключается в отсутствии искажения формы кривой тока, потребляемого преобразователем из питающей сети, и фазового сдвига тока относительно напряжения питающей сети (при чисто активной нагрузке).
6.7. Фазоступенчатый метод регулирования переменного напряжения
Фазоступенчатый метод регулирования переменного напряжения реализуется при совместном использовании ступенчатого и фазовых методов регулирования. Этот метод реализуется также при наличии сетевого трансформатора с отпайками вторичной обмотки,
151
число которых определяет число ступеней вторичного напряжения трансформатора (тиристорных пар).
Для реализации этого метода регулирования также можно использовать схему, приведенную на рис. 47.
Существует двух-, трех-, четырех- и многоступенчатое фазовое регулирование.
Суть фазоступенчатого метода сводится к использованию фазового регулирования для плавного изменения действующего значения напряжения на нагрузке в пределах каждой ступени выходного напряжения. Осуществляя широкий диапазон плавного регулирования напряжения, фазоступенчатый метод обеспечивает более высокие значения коэффициента мощности по сравнению с фазовыми методами.
Если преобразователь осуществляет двухступенчатое регулирование, то в схеме должны быть установлены две пары встречнопараллельно включенных тиристоров, каждая из которых осуществляет регулирование напряжения на своей ступени. Рассмотрим принцип фазоступенчатого метода на примере двухступенчатого регулируемого преобразователя, схема которого приведена на рис. 47. На рис. 49 показаны временные диаграммы, поясняющие фазоступенчатый способ регулирования напряжения переменного тока.
Управляющие импульсы на отпирание тиристоров VT1 и VT2 низшей ступени подаются в моменты перехода напряжения переменного тока через ноль. Отпирание тиристоров VT3 и VT4 высшей ступени производят с отстающим фазовым сдвигом на угол α относительно указанных моментов времени.
При угле α = 0° моменты поступления отпирающих импульсов на включенные в одинаковом направлении тиристоры обеих групп (VT1, VT3 и VT2, VT4) совпадают. Однако управляющие импульсы
u |
α |
u02 |
|
|
|
|
|
|
|
u01 |
ωt |
|
|
|
|
0 |
|
π |
2π |
Рис. 49. Временные диаграммы, поясняющие фазоступенчатый метод регулирования переменного напряжения
152

приводят к поочередному отпиранию только тиристоров VT3, VT4 высшей ступени. Тиристоры VT1, VT2 остаются в закрытом состоянии под действием разности напряжений (U2-0 – U1-0), являющейся для них запирающей. Таким образом, при α = 0°напряжение на нагрузке определяется напряжением U2-0 высшей ступени. Полуволна напряжения нагрузки положительной полярности формируется при открытом тиристоре VT3, а полуволна напряжения отрицательной полярности – при открытом тиристоре VT4.
При углах π > α > 0 управляющие импульсы на отпирание тиристоров VT3, VT4 следуют с задержкой во времени относительноуправляющихимпульсовнаотпираниетиристоровVT1,VT2. На интервалах α проводит либо тиристор VT1 (при положительной полярности напряжения U0-1), либо тиристор VT2 (при отрицательной полярности напряжения U0-1), в связи с чем на указанных интервалах кривая напряжения нагрузки определяется отрезками синусоиды напряжения U0-1. Управляющий импульс, поступающий спустя интервал α на тиристор VT3 (или VT4), вызывает его отпирание. Затем под воздействием напряжения U2-1 происходит запирание тиристора нижней ступени, проводившего ток ранее. Напряжение на нагрузке до окончания текущей полуволны напряжения питания определяется напряжением u2-0 вторичной обмотки трансформатора.
Подача управляющих импульсов на тиристоры высшей ступени с углом α = 180° не приводит к их отпиранию, вседствие чего напряжение на нагрузке определяется синусоидой напряжения u1-0 низшей ступени в условиях поочередной проводимости тиристоров
VT1, VT2.
Таким образом, при плавном управлении углом α (моментом отпирания тиристоров VT3, VT4) преобразователь осуществляет изменение действующего значения напряжения на нагрузке в пределах
от U0-1 до U0-2.
Регулировочную характеристику Uнг = f(α) можно построить по формуле
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uíã = 1π |
α |
|
|
|
U0-1)2 sin2 ωtdωt+ |
1π |
π |
|
|
|
U0-2)2 sin2 ωtdωt. |
|
||||||||||
ò( |
2 |
ò( |
|
|
2 |
(193) |
||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
После упрощения формулы получим |
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
æ |
|
1 |
ö |
|
|
2 |
æ |
|
|
|
1 |
ö |
|
|
||
|
|
|
|
|
U0-1 |
ç |
|
÷ |
|
U0-2 |
ç |
|
|
|
÷ |
|
|
|||||
U |
|
= |
|
|
|
ç |
α- |
|
sin2α÷ |
+ |
|
|
ç |
π-α+ |
|
sin2α÷. |
(194) |
|||||
|
|
|
|
|
|
|
|
|||||||||||||||
íã |
|
|
|
π |
|
2 |
÷ |
|
|
π |
|
|
|
2 |
÷ |
|
|
|||||
|
|
|
|
|
|
è |
|
ø |
|
|
è |
|
|
|
ø |
|
|
|||||
153
6.8. Система импульсно-фазового управления
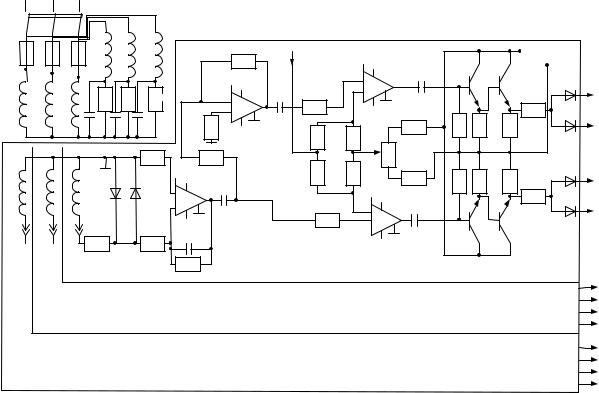
Система импульсно-фазового управления предназначена для выработки импульсов управления, подаваемых на управляющие переходы тиристоров силовой схемы выпрямителя. Принципиальная схема СИФУ приведена на рис. 50, а временные диаграммы, поясняющие принцип работы этой схемы, – на рис. 51.
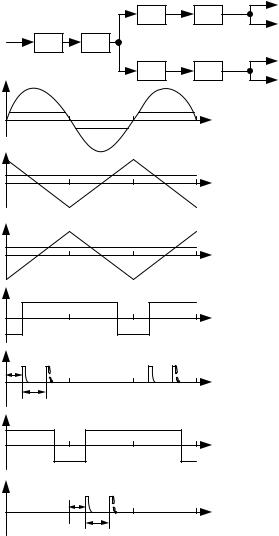
Узел синхронизации выполнен на трансформаторе Т и ячейке ограничения напряжения синхронизации R1 – VD1 – VD2 (на рис. 46 показан канал системы управления фазы А). Для защиты системы управления от помех на первичной стороне трансформатора синхронизации Т установлен фильтр Lф – Сф – Rф. Напряжение с выхода одного канала узла синхронизации поступает на вход ГПН. Напряжение с выхода ГПН, выполненного на операционном усилителе (ОУ) А1, через конденсатор С2 поступает на инвертирующий вход усилителя А2 и на вход усилителя А3 – первого узла сравнения. Напряжение на выходе усилителя А2 противофазно напряжению на выходе усилителя А1 (см. рис. 51, в, г). Эти напряжения называют опорными. Напряжение с входа А2 через конденсатор С3 поступает на вход второго узла сравнения, выполненного на ОУ А4. На вторые входы узлов сравнения поступает напряжение управления Uу α.
Вмоменты равенства амплитуд опорных напряжений и напряжения управления происходит смена полярности выходных напряжений узлов сравнения (рис. 51, в–ж) и формирование узкого импульса управления, который после усиления поступает на управляющий вход оптронного тиристора силовой схемы выпрямителя (рис. 51, е, з).
Для обеспечения работы трехфазной мостовой схемы выпрямле-
ния импульсы управления выполняются «сдвоенными», с фазовым сдвигом, равным π/3.
6.9.Пример расчета схемы управления
Вкачестве усилителей DA1, DA4 выбирают ОУ К140УД1Б. Для их питания необходим двухполярный источник ±12 В.
Ограничитель напряжения синхронизации
Выбираем диоды с малыми Rв.дин, например Д223А, имеющие следующие параметры: ∆Uв.пр = 0,8 В, I в max = 50 мA; Uобр max = 100 В.
154
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
Lф |
|
|
|
|
R8 |
|
|
Uyα |
|
|
|
|
|
|
|
|
|
+12B |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
7 A4 |
|
|
|
VT3 |
VT4 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C5 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
+ |
|
|
|
|
- |
|
|
|
|
|
VD3 Uу.в4 |
||||
|
|
|
|
Rф |
|
|
|
7A2 |
C3 |
R10 |
+ |
|
|
|
|
|
|
|
|
-12B |
|||
|
|
|
|
|
|
|
- |
1 |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
4 |
|
|
- |
|
|
R12 |
|
|
|
|
VD4 U |
|||
|
|
|
|
Cф |
|
|
|
+ |
1 |
|
|
|
|
|
|
|
|
|
|
R22 |
|||
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
у.в4 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
R9 |
|
|
|
R24 |
R11 |
|
|
|
R19 |
|
R20 |
R21 |
|
||
|
|
|
|
|
|
|
|
R7 |
|
|
|
|
R13 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
R3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
R14 |
|
R15 |
R16 |
R17 |
VD5 Uу.в1 |
|
|
|
|
+ |
|
|
|
|
|
R23 |
R6 |
|
|
|
|
|
|
|
R18 |
||||
|
|
|
VD1 |
VD2 |
+ |
7 A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VD6 Uу.в1 |
||
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
R5 |
|
|
7 |
A3 C4 |
|
|
|
|
|||||
|
|
|
|
|
- |
1 |
4 |
C2 |
|
|
|
+ |
|
|
|
|
|||||||
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
4 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
C1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
VT1 |
VT2 |
|
||
C |
B |
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
R1 |
R2 |
|
|
R4 |
|
|
|
|
Канал фазы А |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uy.в3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uy.в3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uy.в6 |
|
|
|
|
|
|
|
|
|
|
|
|
Канал фазы В |
|
|
|
|
|
|
|
|
|
|
Uy.в6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uy.в5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uy.в5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Uy.в2 |
|
|
|
|
|
|
|
|
|
|
|
|
Канал фазы С |
|
|
|
|
|
|
|
|
|
|
Uy.в2 |
155 |
|
|
|
Рис. 50. |
Принципиальная электрическая схема СИФУ |
|
|
|
|
||||||||||||||
a) |
|
|
|
ÓÑ1 |
ÓÔ1 |
|
|
|
|
|
|
|
|
|
Uc |
C |
ÃÏÍ |
|
|
|
|
|
|
|
|
||
á) |
|
|
|
ÓÑ2 |
ÓÔ2 |
|
|
|
|
|
|
|
|
uc |
|
|
|
|
|
|
|
0 |
|
π |
2π |
3π |
ω t |
â) |
|
|
|
|
|
|
uâûõ A1 |
|
|
uy α |
|
|
ω t |
|
0 |
|
π |
2π |
3π |
|
ã) |
|
|
|
uy α |
|
|
uâûõ A2 |
|
|
|
|
ω t |
|
|
0 |
|
π |
2π |
3π |
|
|
|
|
||||
ä) |
|
|
|
|
|
|
uâûõ A3 |
|
|
|
|
|
ω t |
|
0 |
|
π |
2π |
3π |
|
|
|
|
|
|
|
|
å) |
α |
|
uy.â2 |
|
|
|
uy.â1 |
|
|
|
ω t |
||
|
|
π |
2π |
|
||
|
0 |
π/3 |
3π |
|||
æ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
uâûõ A4 |
|
|
|
|
|
ω t |
|
0 |
|
π |
2π |
3π |
|
ç) |
|
|
|
|
|
|
uy.â4 |
|
|
α |
uy.â5 |
|
ω t |
|
|
|
|
|||
0 |
|
|
2π |
3π |
||
|
|
π/3 |
|
|||
|
|
|
|
|
|
|
Рис. 51. Структурная схема системы управления (а) и временные диаграммы, поясняющие работу импульсного фазового управления (б–з):
С– узел синхронизации; ГПН – генератор пилообразного напряжения; УС1, УС2 – узлы сравнения; УФ1, УФ2 – усилители-формирователи
156

Для получения синхронизирующего напряжения, близкого по форме к прямоугольному, необходимо, чтобы амплитуда синхронизирующего синусоидального напряжения выбиралась из условия
Uсинхр max = ∆Uв.пр · 10 = 0,8 · 10 = 8 В. Действующее значение
Ucèíõð =8

 2 =5,7 Â.
2 =5,7 Â.
Выбираем стандартное напряжение Ucинхр = 6 В. Задавшись максимальным током ограничивающих диодов VD1 и VD2, Iв max, равным 30 мA, определим величину токоограничивающего сопротивления R1:
R |
= |
Uсинхр max -∆Uâ.ïð |
= 8-0,8 |
=240 Îì. |
|
||||
1 |
Iâmax |
0,03 |
|
|
|
|
|
||
Интегратор на операционном усилителе DA1
Для осуществления плавной регулировки угла управления α амплитуда треугольного напряжения Um должна иметь доста-
точную величину. Примем Um = 0,5Uвых max = 0,5 · 6 = 3 В. Для ограничения входных токов ОУ при его работе в линейном режи-
ме для используемого типа ОУ рекомендуется последовательно со входом включить резистор ~100 кОм. Выбираем резисторы R2 и R3 = 91 кОм.
Выходное напряжение интегратора
1 t
∆Uâûõ = R2C1 ò0 Uâõ(t)dt.
Учитывая, что Uвх(t) ≈ const ≈ 0,8 В, а время интегрирования t = = 0,5Tc = 10 мс и Uвх = 2Um = 6 B, находим емкость С1:
|
Uâõt |
|
0,8×10×103 |
-6 |
|
Ñ1 = |
|
= |
6×91×103 |
=0,0145×10 |
Ô=14,5 íÔ. |
∆UâûõR2 |
Выбираем стандартный конденсатор С1 емкостью 15 нФ.
Для улучшения характеристик интегратора применяется отрицательная обратная связь по постоянному току с помощью резистора R4:
R4 ≈ 10 · R2 = 10 · 91 = 910 кОм (выбираем 1 МОм).
157
Компараторы на DA3 и DA4
В схеме компаратора ОУ работает в импульсном режиме. Для импульсного режима работы компаратора ограничивающие резисторы, включаемые последовательно со входами усилителя, рекомендуется брать на порядок меньше, чем в линейном режиме, т. е. R6, R5, R10 и R11 = 20 кОм.
Усилитель-инвертор на операционном усилителе DА2
Для получения коэффициента усиления усилителя kу = –1 необходимо, чтобы R7 = R8. Рекомендуемая величина R8 = 91 кОм (см. расчет интегратора). Сопротивление R9 должно быть равно сопротивлению параллельно включенных резисторов R7 и R8. Выбираем R9 = 47 кОм.
Разделительные конденсаторы С2 и С3
Условие, которое необходимо выполнить:
постоянная времени цепочек С2–R5 и С3–R10 должна быть больше периода напряжения сети переменного тока:
τ = С2 · R5 = C3 · R10 ≥ 5T, где T = Tc = 0,02 с.
Следовательно: С2 = С3 = τ/R = 5T/R = (5 · 2 · 102)/(20 · 103) = = 5 · 10–6 Ф = 5 мкФ.
Регулируемый делитель напряжения R12 – R13 – R14
Делитель питается от источника питания Еп = 24 В. Для обеспечения регулирования угла управления α в полном диапазоне делитель должен обеспечивать напряжения
Umin = 12 – Um = 12 – 3 = 9 В;
Umax = 12 + Um = 12 + 3 = 15 В. Следовательно, на R3 должно падать напряжение, равное
Umax – Umin = 15 – 9 = 6 В.
Приняв ток делителя Iдел = 5 мА (Iдел >> Iвх.комп), находим величину сопротивления R13:
R |
= |
UR13 |
= |
6 |
=1,2 êÎì. |
|
5×10-3 |
||||
13 |
|
Iäåë |
|
||
158

Общее сопротивление делителя |
|
||||||||
|
R |
|
= |
Eï |
= |
24 |
=4,8 êÎì. |
||
|
|
|
5×10-3 |
||||||
|
äåë |
|
|
Iäåë |
|
||||
R |
=R |
= |
Räåë -R13 |
= 4,8-1,2 =1,8 êÎì. |
|||||
|
|||||||||
12 |
14 |
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
|||
Дифференцирующие цепочки С4 – R15 и C5 – R19
В общем случае дифференцирующая цепь выбирается из условия, обеспечивающего величину постоянной времени дифференцирующей цепочки значительно большую, чем время включения тиристора (τ > tвкл), поскольку при индуктивном характере нагрузки импульс управления тиристора должен иметь большую длительность, обеспечивающую надежность включения тиристора. Принимаем τ = 10tвкл. Следовательно, принимая R15 = 2 кОм, находим емкость C4 и С5:
Ñ= τ = 20×10-6 =10×10-9Ô R 2×103
(С4 и С5 ≈ 0,01 ÷ 0,025 мкФ).
Усилители мощности
В качестве усилителя мощности выбираем схему составного эмиттерного повторителя. Размах напряжения на выходе компаратора
∆Umax »2Uнасыщmin =2×6=12Â.
Принимаем амплитудное значение импульса управления Uy max = 12 В. С учетом допустимого значения тока управляющего электрода тиристора Iy max = 0,3 А выбираем сопротивление ограничивающих резисторов R18 и R22:
R18 =R22 = Uymax 12 =40 Îì.
Iymax 0,3
В качестве транзисторов VT1 и VT4 выбираем транзисторы ти-
па КТ315В, имеющие параметры Uкэ max = 40 В, Iк.ср max = 0,1 А, h21Э = 20.
159
Для надежной работы при повышенной температуре в эмиттерные цепи транзисторов ставим резисторы R16, R17, R20, R21 по 2 кОм каждый. Для окончательного выбора элементов схемы СУ необходимо определить выделяемую мощность в резисторах и максимальное рабочее напряжение на конденсаторах:
–мощность, выделяемая на резисторах: PR max ≤ 0,5 Вт;
–максимальное напряжение на конденсаторах UС < Eп = 24 В. Отметим, что в приведенном выше примере СИФУ управляе-
мого выпрямителя опорный сигнал имеет пилообразную форму (см. рис. 51, в, г) и изменяется во времени по линейному закону:
uоп = Uоп m(1 – 2ωt/π), |
(195) |
где Uоп m – максимальное (амплитудное) значение опорного сигнала; ωt – текущее значение временной координаты.
Форма опорного сигнала оказывает существенное влияние на регулировочную характеристику управляемого выпрямителя и на величину его коэффициента передачи.
6.10. Регулировочная характеристика управляемого выпрямителя при различных формах кривой опорного напряжения
Рассмотрим первый случай выполнения СИФУ – опорный сигнал изменяется во времени по линейному закону:
uоп = Uоп m(1 – 2ωt/π).
При ωt = α напряжение управления Uу равно опорному сигналу uоп. В этот момент происходит формирование импульса управления (см. рис. 51). Формула (195) для этого момента времени принимает вид
Uу = uоп = Uоп m(1 – 2α/π). |
(196) |
||||
Введем относительный параметр сигнала управления |
|
||||
|
|
|
|
y =Uy / Uîïm. |
|
U |
|
||||
Формула (196) принимает вид |
|
||||
|
|
y =1-2α/ π. |
|
||
U |
(197) |
||||
Из выражения (197) получим выражение регулировочной характеристики системы управления α=f(Uy):
α=π(1-U |
y) / 2. |
(198) |
160