

4. Описание лабораторной установки
Л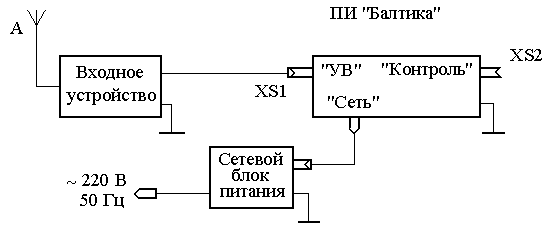 абораторная
установка представляет собой серийный
морской приё-моизмеритель (ПИ) ИФРНС
"Балтика" со входным устройством,
имеющим штыревую приемную антенну
(элементарный диполь) высотой 1,5 м, и с
сетевым блоком электропитания. Структурная
схема установки приведена на рис.3.
абораторная
установка представляет собой серийный
морской приё-моизмеритель (ПИ) ИФРНС
"Балтика" со входным устройством,
имеющим штыревую приемную антенну
(элементарный диполь) высотой 1,5 м, и с
сетевым блоком электропитания. Структурная
схема установки приведена на рис.3.
Рис.3. Структурная схема лабораторной установки
ПИ "Балтика" имеет следующие органы управления:
- наборное поле из 16 клавиш;
- тумблер включения электропитания "СЕТЬ" (сбоку);
- тумблер включения экрана "ЭКРАН" (сбоку);
- аварийная кнопка "ПУСК" (сзади).
ПИ "Балтика" содержит два индикатора:
- экран (матричный газоразрядный) с десятью строками по 16 сим-волов, предназначенный для отображения вводной и выводной информации;
- светодиод "ОТСЧЁТ" для индикации наличия достоверных от-счётов при отключенном экране.
Наборное поле (клавиатура) содержит следующие клавиши:
- десять цифровых клавиш ("0"-"9");
- знаковая клавиша ("–");
- клавиша десятичной запятой (",");
- клавиша стирания ("С");
- префиксная клавиша ( ) ;
- управляющие клавиши "Ввод" (" ") и "Вывод" (" ").
Радионавигационные сигналы ИФРНС "Чайка" принимаются штыре-вой антенной (вертикальный электрический диполь), фильтруются, усилива-ются и поступают в предпроцессор.
– 12 –
В предпроцессоре сигналы преобразуются в цифровую последова-тельность, которая запоминается в буферном накопителе. Из последнего дискретные отсчёты считываются вычислительным устройством, которое производит статистическую обработку поступающей цифровой информации (поиск сигналов ОС, нахождение точки привязки к местной шкале времени), вычисление текущих значений радионавигационных параметров и их пре-образование в требуемую систему координат, а также решает ряд сервисных задач. Результаты вычислений высвечиваются на экране ПИ.
При необходимости информация, выводимая на экран, сопровожда-ется звуковыми сигналами.
Обработка принятых радиосигналов обычно производится в несколь-ко этапов (см. рис.4):
- поиск сигналов станций ИФРНС,
- допоиск фронтов сигналов,
- фазовое измерение временнóго положения сигналов,
- разрешение многозначности фазовых отсчётов.
При поиске сигналов производится стробирование периода Тп с дис-кретностью п, накопление выборок от каждого строба в отдельных ячейках и сравнение результатов накопления с порогом принятия решения в режиме поиска. Если порог во всех ячейках не превышен, то стробы сдвигаются на п (мкс) и процесс поиска повторяется. В противном случае принимается решение о наличии сигнала в стробе, в котором произошло превышение порога (рис.4.б, точка П). Таким образом, поиск является одновременно из-мерением временнóго положения сигнала ИФРНС (рис.4,а) с точностью п.
Радиосигнал ИФРНС распространяется к НТС по двум путям: непо-средственно вдоль Земли (земной сигнал) и после отражения от ионосферы (отраженный сигнал, см. рис.4); задержка второго относительно первого около 40 мкс. Поскольку параметры отраженного сигнала нестабильны во времени, то для измерения РНП используется фронт земного сигнала, сво-бодный от отраженного. Задача обнаружения фронта решается на этапе допоиска.
При допоиске используется стробирование участка Тп около места обнаружения сигнала в поиске с шагом дп п (рис.4.в), ограниченным числом стробов (10 на рис.4.в). Далее, как и на этапе поиска, решается задача обнаружения сигнала. Если при этом будет обнаружен сигнал в первом стробе (точка ДП1 на рис.4.в), то процесс повторяется при новом положении стробов допоиска (рис.4.г). Если при новом положении стробов в первом стробе сигнал не обнаружен, а начиная с k-го строба обнаружен, то прини-мается решение о совпадении начала фронта сигнала с положением строба с наименьшим номером (точка ДП2 на рис.4.г). На этом процесс допоиска завершается и начинается измерение фазы сигнала.
– 13 –
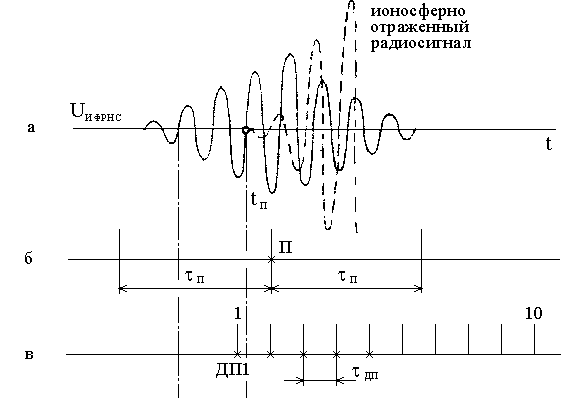

Рис.4. Временные диаграммы обработки радиосигналов ИФРНС
– 14 –
Измерение фазы несущей обычно производится с помощью следя-щего измерителя, строб СС которого первоначально помещается в точку ДП2. В процессе отслеживания фазы несущей строб слежения перемещается в точку предварительной временнóй привязки к радиоимпульсу (точку “пере-хода через ноль” с положительной производной, как показано на рис.4.д, точка СС1). После этого производится разрешение многозначности фазовых отсчётов.
Разрешение многозначности фазовых отсчётов обеспечивается систе-мой слежения за огибающей, на вход которой поступает продифферен-цированная огибающая, точка перехода через ноль которой (ХТО – харак-терная точка огибающей) находится в периоде несущей радиоимпульса, условно принятым за третий (рис.4.е). Этот период еще свободен от ионосферно-отраженного сигнала, но имеет достаточно высокое отношение сигнал/шум. Стробы системы разрешения многозначности стремятся занять положение, изображенное на рис.4.ж (РСИ и ПСИ). Поскольку строб измери-теля фазы жестко привязан к стробам разрешения многозначности, то он, после разрешения многозначности, займет положение tп в соответствии с рис.4.д (точка СС2).
После завершения всех этапов измерения РНП по каждой станции ИФРНС стробы измерителей фазы СС займут положения, которые эквива-лентны положениям сигналов на периоде Тп (рис.1.а). Поэтому интервалы времени между одноименными стробами измерителей фазы несущей ведущей и двух ведомых ОС соответствуют двум РНП. В дальнейшем РНП могут измеряться квазинепрерывно (с дискретностью поступления сигналов ИФРНС).
– 15 –