

1.5. Плоская система произвольно расположенных сил
Задача приведения системы произвольно расположенных сил к простейшему виду связана с необходимостью их переноса по плоскости параллельно самим себе. Рассмотрим предварительно теорему о возможности такого переноса.
Теорема о параллельном переносе силы (теорема Пуансо).
Пусть в точке А
тела приложена сила
![]() ,
которую требуется перенести самой себе
в точкуВ
(рис. 16,а). Приложим в точке В
уравновешенную систему из двух сил
,
которую требуется перенести самой себе
в точкуВ
(рис. 16,а). Приложим в точке В
уравновешенную систему из двух сил
![]() и
и![]() ,
равных и параллельных
,
равных и параллельных![]() (рис. 16,б). Тогда силу
(рис. 16,б). Тогда силу![]() можно считать силой
можно считать силой![]() ,
перенесенной в точкуВ,
а силы
,
перенесенной в точкуВ,
а силы
![]() и
и![]() ,
образуют пару с моментомM=Fh.
Таким образом, состояние, изображенное
на рис. 16,в, соответствует первоначальному
состоянию тела.
,
образуют пару с моментомM=Fh.
Таким образом, состояние, изображенное
на рис. 16,в, соответствует первоначальному
состоянию тела.

а) б) в)
Рис. 16
Итак, не изменяя действия силы на тело, ее можно перенести в любую точку параллельно самой себе, добавив пару сил, момент которой равен моменту заданной силы относительно новой точки приложения (рис. 16,в).
1. Приведение плоской системы сил к данной точке.
Пусть на твердое
тело действует произвольная плоская
система
![]() ,
,![]() ,
,![]() (рис.
17,а).
(рис.
17,а).

а) б) в) г)
Рис. 17
Выберем произвольную
точку О –
центр
приведения. Перенесем все силы в точку
О, добавляя при этом соответствующие
пары. В результате приведения получим
систему сил
![]() ,
,![]() ,…
,…![]() и систему парM1=F1h1,
M2=F2h2,
…, Mn=Fnhn
(рис. 17,б).
и систему парM1=F1h1,
M2=F2h2,
…, Mn=Fnhn
(рис. 17,б).
Силы, приложенные в точке, можно заменить одной силой, равной их векторной сумме, – главным вектором Fp (рис. 17,в)
![]() (8)
(8)
Моменты, действующие на тело, можно заменить одним моментом, равным их алгебраической сумме, – главным моментом:
![]() (9)
(9)
Таким образом, произвольную плоскую систему сил всегда можно заменить главным вектором и главным моментом (рис. 17,г).
2. Условия равновесия произвольной плоской системы сил.
Произвольная плоская система сил находится в равновесии, если главный вектор и главный момент этой системы относительно любой точки равны нулю, т.е.
![]() ,
,
![]() (10)
(10)
Первое равенство эквивалентно двум равенствам:
![]() ;
;
![]()
Итак, для равновесия тела, находящегося под действием произвольной плоской системы сил, необходимо и достаточно, чтобы алгебраические суммы проекций всех сил на каждую из двух координатных осей и сумма их моментов относительно любого центра равнялась нулю. Уравнения равновесия произвольной плоской системы сил:
![]() ;
;![]() ;
;![]() (11)
(11)
Возможны и другие формы записи уравнений равновесия:
![]() ;
;
![]() ;
;![]() (12)
(12)
где ось X не должна быть перпендикулярна линии АВ. Или
![]() ;
;
![]() ;
;![]() (13)
(13)
где точки А, В и С не должны лежать на одной прямой.
1.6. Примеры решения задач
В рассмотренных ниже примерах необходимо найти реакции связей. Решения приводятся в общем виде (без численных значений).
Задача 1.
Определить реакции стержней кронштейна, приведенного на рис. 18,а. Дано: F, , .

а) б)
Рис. 18
Объект равновесия – узел А. Отбрасываем стержни и заменяем их действие соответствующими реакциями R1 и R2 (рис. 18,б). Записываем два уравнения равновесия:
![]() ;
;
![]() (14)
(14)
![]() ;
;
![]() (15)
(15)
Решая эту систему уравнений, находим реакциями R1 и R2.
Задача 2.
Найти полную реакцию неподвижного цилиндрического шарнира А и реакцию в стержне ВС, удерживающих в равновесии тело прямоугольной формы (рис. 19,а). Дано: F, а, b.

а) б)
Рис. 19
Объект равновесия – тело прямоугольной формы. Отбрасываем связи (шарнир А и стержень ВС) и заменяем их действие соответствующими реакциями RAX, RAY и RBC (рис.19,б). Первые два уравнения равновесия будут иметь вид:
![]() ;
;![]() (16)
(16)
![]() ;
;![]() ;
(17)
;
(17)
В качестве третьего уравнения равновесия запишем сумму моментов всех сил относительно точки А:
![]() ;
;
![]() (18)
(18)
Необходимые для решения этих уравнений величины находятся следующим образом:
![]() ;
;
![]() ;
;
![]() (19)
(19)
Решая эту систему уравнений находим RAX, RAY и RBC. Тогда
![]() (20)
(20)
Для проверки решения задачи можно использовать уравнение суммы моментов всех сил относительно любой другой точки тела, например, В:
![]() (21)
(21)
Если задача решена верно, то это уравнение будет равно нулю.
Задача 3.
Невесомая балка опирается на две опоры – цилиндрический неподвижный шарнир в точке А и подвижный шарнир в точке В (рис. 20,а). Необходимо найти реакции в этих опорах, если даны: F, q, М , а, b, с.
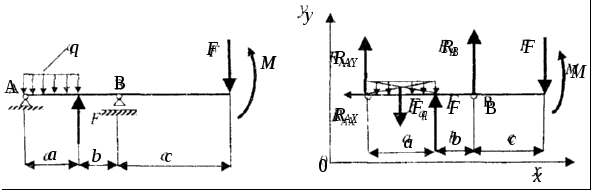
а) б)
Рис. 20
Объект равновесия – балка. Отбрасываем связи (шарниры в точках А и В) и заменяем их соответствующими реакциями RAX, RAY и RBC (рис.20, б).
Первые два уравнения равновесия будут иметь вид:
![]() ;
;
![]() (22)
(22)
![]() ;
;
![]() ,где
,где
![]() .(23)
.(23)
В качестве третьего уравнения равновесия запишем сумму моментов всех сил относительно точки А:
![]() ;
;
![]() (24)
(24)
Решая эту систему уравнений, находим RAX, RAY и RBC. Для проверки решения задачи можно использовать уравнение суммы моментов всех сил относительно точки В:
![]() .
(25)
.
(25)
Если задача решена верно, то это уравнение будет равно нулю.
Задача 4.
Горизонтальный стержень жестко защемлен одним концом в точке А (рис.21,а). Найти реакции в этой точке, если дано: F, М, q, а, b, .

а) б)
Рис. 21
Объект равновесия – горизонтальный стержень. Отбрасываем связь (жесткая заделка в точке А) и заменяем ее соответствующими реакциями RAX, RAY и MА (рис 21,б). Составляем три уравнения равновесия:
![]() ;
;
![]() ,
(26)
,
(26)
![]() ;
;
![]() ,
(27)
,
(27)
где Fq1=qa; Fq2=qb;
![]() ;
;
![]() ,
(28)
,
(28)
где h=asin.
Решая
эту систему уравнений, находим RAX,
RAY
и MА.
Тогда
![]() .
.
Для проверки решения задачи составляем уравнение суммы моментов всех сил относительно точки В:
![]() (29)
(29)
Если задача решена верно, то уравнение (29) будет равно нулю.