

Устойчивость систем автоматического управления Понятие устойчивости
Под устойчивостью понимается свойство системы возвращаться в состояние установившегося равновесия после устранения возмущения, нарушившего это состояние. Свойство устойчивости системы автоматического управления принято иллюстрировать состояниями равновесия шара, находящегося на разных поверхностях (рис. 74).
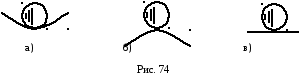
На рис. 74а система устойчиваи шар возвращается в начальное положение после исчезновения силы, сместившей его из этого положения, на рис. 74бсистема неустойчива, на рис. 74в изображенобезразличноеположение равновесия шара.
При приложении к САУ внешних воздействий (управляющих воздействий или возмущений) в системе возникает переходный процесс у(t), который складывается из двух составляющих: свободные движения системыyc(t), определяемые начальными условиями и свойствами самой системы, и вынужденные движенияyв(t), определяемые внешним воздействием и свойствами системы:
y(t)=yc(t)+yв(t).
Система будет устойчива, если её свободные движения затухают со временем и в системе устанавливается вынужденный процесс
![]()
Для неустойчивых систем это условие не выполняется, и практическое их использование является невозможным.
Таким образом, свойство устойчивости САУ является весьма важным свойством, совершенно необходимым для обеспечения работоспособности системы. Поэтому исследование устойчивости САУ является важным элементом теории автоматического управления.
П оказателем
устойчивости или неустойчивости системы
служит вид переходной характеристики
системы. Для устойчивой системы переходная
характеристика сходится (т.е. стремится
к установившемуся значению выходной
величины (рис. 75а)). Свободный процесс в
устойчивой системе затухает (1колебательный процесс, 2 – апериодический
процесс).
оказателем
устойчивости или неустойчивости системы
служит вид переходной характеристики
системы. Для устойчивой системы переходная
характеристика сходится (т.е. стремится
к установившемуся значению выходной
величины (рис. 75а)). Свободный процесс в
устойчивой системе затухает (1колебательный процесс, 2 – апериодический
процесс).
Для неустойчивой системы переходная характеристика расходится (рис. 75б). При этом в системе не устанавливается постоянное значение управляемой величины в соответствии с задающим воздействием, а изменение этой величины будет происходить до некоторого предельного состояния системы, определяемого её свойствами. Неустойчивая система не обеспечивает адекватной реакции на задающее воздействие, поэтому такая система неработоспособна. В общем случае для получения переходной характеристики системы необходимо решить дифференциальное уравнение системы. По графику переходного процесса можно сделать заключение об устойчивости системы и об особенностях переходного процесса.
Условия устойчивости системы автоматического управления
Обыкновенная линейная система автоматического управления описывается дифференциальным уравнением с постоянными коэффициентами
![]()
Для устойчивости системы необходимо, чтобы свободный процесс в ней был бы сходящимся. Свободные движения системы описываются левой частью исходного дифференциального уравнения и, следовательно, уравнение свободного процесса в системе
![]() .
.
Характеристическое уравнение замкнутой системы при этом запишется как
![]() .
.
Характеристическое уравнение системы получается приравниванием к нулю знаменателя передаточной функции замкнутой системы.
Общее решение обыкновенного линейного дифференциального уравнения, имеющего порядок n:
![]() ,
,
где Ai– постоянные интегрирования,pi – корни характеристического уравнения,n– число корней.
Корни характеристического уравнения могут быть как вещественными, так и комплексными (попарно сопряжёнными). Каждый комплексный корень порождает в решении уравнения слагаемое вида
![]() ,
,
где ![]() – начальная фаза,Аi– начальная амплитуда.
– начальная фаза,Аi– начальная амплитуда.
При решении характеристического уравнения системы возможны различные случаи, в зависимости от соотношения его коэффициентов (т.е. в зависимости от параметров системы).
1. Корни характеристического уравнения имеют отрицательные вещественные части. В этом случае для всех слагаемых
![]()
и, следовательно, свободный процесс затухает. Система устойчива, а графики переходного процесса показаны на рис. 76 (для каждого слагаемого). На рис. 76а показан затухающий апериодический процесс, а на рис. 76б затухающий колебательный процесс (пунктиром показана огибающая колебательного процесса). Апериодический процесс будет наблюдаться при чисто вещественном корне характеристического уравнения, колебательный – при комплексном корне.
2. Среди корней характеристического уравнения есть хотя бы один корень с положительной вещественной частью. В этом случае в общем решении дифференциального уравнения для свободного процесса появится слагаемое, стремящееся к бесконечности с увеличением времени:
![]()
и переходный процесс будет расходящимся (рис. 77). Графики показаны для одного слагаемого общего решения. Система в этом случае неустойчива.

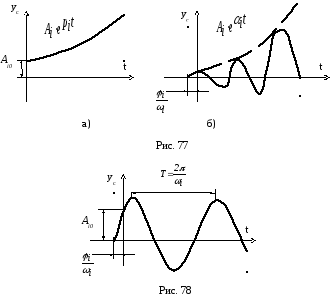
3. Характеристическое уравнение имеет хотя бы одну пару комплексных корней с нулевой вещественной частью. В решении дифференциального уравнения появляется гармоническая составляющая
![]() ,
,
порождающая незатухающую гармоническую
составляющую переходного процесса
(рис. 78). При
![]() переходный процесс системы будет носить
характер незатухающих колебаний. Принято
считать, что в этом случае система
находится на границе устойчивости. Этот
случай представляет чисто теоретический
интерес и в реальных системах не
наблюдается.
переходный процесс системы будет носить
характер незатухающих колебаний. Принято
считать, что в этом случае система
находится на границе устойчивости. Этот
случай представляет чисто теоретический
интерес и в реальных системах не
наблюдается.
Р ассмотренные
случаи позволяют сформулировать
математическое условие устойчивости
для системы автоматического управления.Система автоматического управления
будет устойчива, если все вещественные
корни характеристического уравнения
системы отрицательны, а все комплексные
корни имеют отрицательные вещественные
части.
ассмотренные
случаи позволяют сформулировать
математическое условие устойчивости
для системы автоматического управления.Система автоматического управления
будет устойчива, если все вещественные
корни характеристического уравнения
системы отрицательны, а все комплексные
корни имеют отрицательные вещественные
части.
Е
Рис. 79
Поскольку корни характеристического уравнения определяются величиной и знаком коэффициентов дифференциального уравнения, то изменение коэффициентов, вследствие изменения параметров системы, может привести к нарушению условия устойчивости. Для исследования устойчивости системы автоматического управления необходимо проверить выполнение условия устойчивости для дифференциального уравнения системы. Система, для которой условие устойчивости выполняется, будет устойчивой (т.е. работоспособной).