

5 Оценка возможности самозапуска
5.1 Определение параметров схемы замещения
Определение величин тока включения, остаточного напряжения и момента электродвигателя при самозапуске требуется производить на основании схем замещения. Характерная схема замещения питания узла нагрузки, при которой осуществляется самозапуск, представлена на рис. 5.1.
При проверке самозапуска электродвигателей напряжением 6-10 кВ активными сопротивлениями элементов сети (за исключением линий 6-10 кВ) можно пренебречь и учитывать только реактивные сопротивления. Как правило, самозапуск двигателей осуществляется от источника питания, мощность которого во много раз больше мощности двигателей.
При расчётах в относительных единицах за базисные величины удобно принимать номинальные мощность и напряжение двигателя или группы двигателей. Сопротивления элементов схемы электроснабжения и двигателей при расчетах в относительных единицах приведенных к базисным условиям опреде–ляются по следующие формулам [8,9]:
– для воздушных и кабельных линий:
![]() ,
(5.1)
,
(5.1)
![]() ,
(5.2)
,
(5.2)
где
![]() - среднее номинальное напряжение
рассматриваемых линий;
- среднее номинальное напряжение
рассматриваемых линий;
– для реактора:
![]() ,
(5.3)
,
(5.3)
– для двигателя:
![]() ,
(5.4)
,
(5.4)
где
![]() относительное сопротивление двигателя
при номинальных условиях;
относительное сопротивление двигателя
при номинальных условиях;
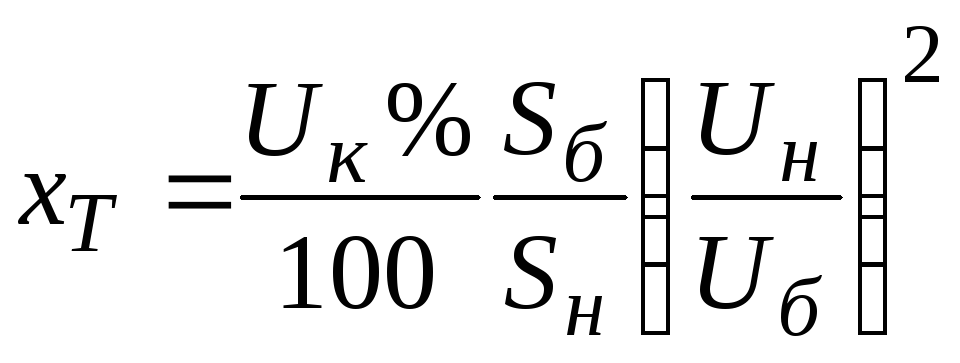
– для трансформатора:
 ,
(5.5)
,
(5.5)
![]() ,
(5.6)
,
(5.6)
где
![]() -
напряжение короткогозамыкания
в процентах;
-
напряжение короткогозамыкания
в процентах;
для трансформатора с расщепленной обмоткой
![]() ,
(5.7)
,
(5.7)
![]() ,
(5.8)
,
(5.8)
![]() ,
(5.9)
,
(5.9)
– для нагрузки:
![]() .
(5.10)
.
(5.10)
Схема
замещения должна быть преобразована к
простейшему виду относительно шин, к
которым подключены самозапускающиеся
двигатели. При этом источник питания и
нагрузка объединяются в один источник
с эквивалентной эдс
![]() и сопротивлением
и сопротивлением
![]() по тем же
правилам; что
и при расчете токов КЗ [6,8]. Все двигатели,
участвующие в самозапуске, объединяются
в один с эквивалентным полным
сопротивлением:
по тем же
правилам; что
и при расчете токов КЗ [6,8]. Все двигатели,
участвующие в самозапуске, объединяются
в один с эквивалентным полным
сопротивлением:
![]() .
(5.11)
.
(5.11)
Пример 4. Расчет параметров схемы замещения
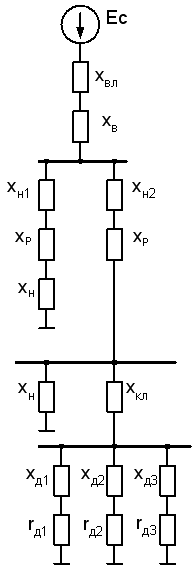
Рисунок 5.1 – Схема замещения
Расчет схемы замещения проводим в относительных единицах приведенных к базисным условиям.
Принимаем
базисные величины:![]() ,
,![]() ,
,![]() ,
,![]() .
.
Расчет параметров схемы замещения производим по формулам указанных в главе 5.1 для схемы замещения на рис. 2.4.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;![]() ;
; ;
;
Так как активное сопротивление всех элементов кроме кабельной линии мало, будет учитываться только активное сопротивление кабельной линии.
Полная мощность двигателя:
![]() .
.
Определение сопротивления двигателей.
Для электродвигателя Д1:
За
время выбега
![]() ,
двигатель АД1 имеет скольжение
,
двигатель АД1 имеет скольжение![]() .
.
Воспользуемся упрощенной формулой (3.2) для определения зависимости индуктивного сопротивления двигателя от скольжения.
 .
.
Приведенное к базисным условиям:
![]() ;
;
![]() ;
;
где
![]() .
.
Для электродвигателя Д2:
За
время выбега
![]() ,
двигатель АД2 имеет скольжение
,
двигатель АД2 имеет скольжение![]() .
.
 .
.
Приведенное к базисным условиям:
![]() ;
;
![]() .
.
Для электродвигателя Д3:
За
время выбега
![]() ,
двигатель АД3 имеет скольжение
,
двигатель АД3 имеет скольжение![]() .
.
 .
.
Приведенное к базисным условиям:
![]() ;
;
![]() .
.