

Информатика 2 сессия / Численные методы решения задач строительства на ЭВМ
.pdfЧисленные методы решения задач линейной алгебры
|
|
|
é1 |
- 20 |
400 |
-8000ù |
|
|
−1 |
|
ê |
1 |
- 20 |
400 |
ú |
B |
= |
ê0 |
ú |
||||
|
ê |
0 |
1 |
- 20 |
ú |
||
|
|
|
0 |
ú |
|||
|
|
|
ê |
0 |
0 |
1 |
|
|
|
|
ë0 |
û |
|||

 A
A
 = max {8, 12, 11, 11}=12;
= max {8, 12, 11, 11}=12; 
 A
A
 −1 = max {0,291; 0,258; 0,292; 0,249}=0,292;
−1 = max {0,291; 0,258; 0,292; 0,249}=0,292;
m(A)=12´0,292=4,506, то есть m(A) невелика и матрица А хорошо обусловлена,

 B
B
 = max {21,21,21,1}=21;
= max {21,21,21,1}=21; 
 B
B
 −1 = max {8421, 421, 21, 1}=8421
−1 = max {8421, 421, 21, 1}=8421
m(B) =21´8421=176841, то есть величина m(B) очень большая и матрица В плохо обусловлена.
nПример 2.9. Рассмотрим три варианта основной системы метода сил для трехпролетной неразрезной балки (рис.2.1).
Рис.2.1. Основные системы для неразрезной балки
В методе сил важным критерием оценки выбранной основной системы является обусловленность коэффициентов системы канонических уравнений. Запишем матрицы податливости и значения меры обусловленности для этих вариантов (табл. 2.1).
73

Численные методы решения задач линейной алгебры
Таблица 2.1
Вариант |
|
|
|
δ |
|
μ |
|
|
|
|
|
|
|
|
|
l3 |
é4 |
9 ù |
|
|
б |
|
6EJ |
ê9 |
24ú |
72,6 |
|
|
|
ë |
û |
|||
|
|
|
|
|
|
|
|
|
l 3 |
é8 |
7ù |
|
|
в |
|
|
|
ê7 |
8ú |
15 |
6EJ |
|
|||||
|
|
ë |
û |
|
||
|
|
l 3 |
é4 |
1ù |
|
|
г |
|
|
|
ê1 |
4ú |
1,667 |
6EJ |
|
|||||
|
|
ë |
û |
|
||
Из сравнения величин меры обусловленности m ясно, что вариант основной системы г) является лучшим, а вариант б) – худшим из трех.
2.6. Вычисление определителя
Как уже говорилось выше, вычислительные затраты на
вычисление определителя соизмеримы с затратами на решение системы линейных алгебраических уравнений.
На примере вычисления определителя можно убедиться в экономичности хороших численных методов.
Вспомним формальное определение определителя, как
суммы всевозможных произведений элементов, взятых из разных строк и столбцов. Таких произведений n! И прямое их вычисление уже при небольшом n ≈30 требует астрономического числа действий > 1030, что вряд ли под силу ЭВМ. А метод исключения Гаусса, например, легко позволяет вычислить определитель сотого и более порядка. В самом деле, в процессе прямого хода, приводя матрицу к треугольному виду и получая эквивалентную матрицу,
мы для этой матрицы получим нулевые значения всех произведений элементов, кроме диагональных. То есть величина
определителя треугольной матрицы равна произведению всех диагональных элементов:
n |
|
det A = ∏aii . |
(2.49) |
i=1
74

Численные методы решения задач линейной алгебры
При этом мы производим следующие операции:
1)деление строки матрицы на ведущий элемент (который предполагается отличным от нуля), что уменьшает величину определителя в такое же число раз, следовательно, вычисляя определитель, надо домножить его на это число;
2)умножение строки матрицы на число и сложение ее с другой строкой, что не влияет на величину определителя;
3)знак определителя может измениться, если производилась
перестановка строк.
Таким образом, величина определителя может быть
вычислена по формуле
det A = ±a11(1) ×a22(2) Kann(n) ,
то есть, определитель равен произведению ведущих элементов для соответствующей схемы Гаусса. Знак ± зависит от того, четной или нечетной была суммарная перестановка строк.
n Пример 2.8. Для матрицы А вычислить определитель методом Гаусса.
é2 |
1 |
4ù |
|
ê |
0 |
ú |
; |
A = ê1 |
3ú |
||
ê0 |
- 2 |
6ú |
|
ë |
|
û |
|
é1 |
0,5 |
2ù |
é1 |
0,5 |
2 |
ù |
|
ê |
|
ú |
ê |
1 |
|
ú |
= -2×0,5×2 = -2 . |
det A = 2× ê0 |
- 0,5 1ú |
= 2×(-0,5)× ê0 |
- 2ú |
||||
ê0 - 2 |
6ú |
ê0 0 |
2 |
ú |
|
||
ë |
|
û |
ë |
|
|
û |
|
В практических задачах редко возникает необходимость в явном виде вычислять значение определителя. Однако иногда они оказываются весьма полезны, например, при исследовании
геометрической неизменяемости сооружений. В курсе
строительной механики рассматриваются геометрические принципы образования неизменяемых систем, которые удается
75
Численные методы решения задач линейной алгебры
применить далеко не для всех конструкций (см. пример 2.9.). В таких случаях следует использовать аналитическое решение,
записав определяющую систему уравнений:
–для статически определимых систем – уравнения равновесия,
–для статически неопределимых –- канонические уравнения какого-либо метода.
Если Det A → 0, система стремится к мгновенно изменяемой,
при Det A=0 система геометрически изменяема. Достаточным
условием геометрической неизменяемости системы является выполнение неравенства Det A ¹ 0.
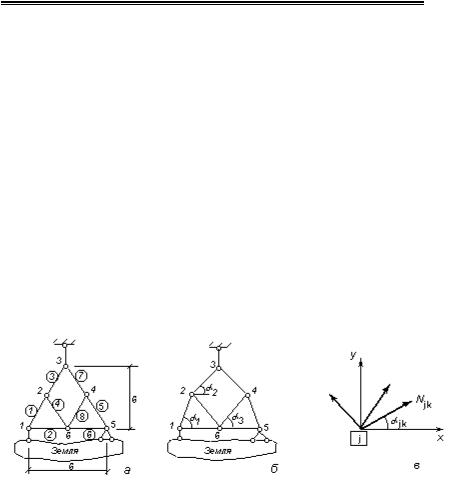
n Пример 2.9. Стержневые системы, изображенные на рис.2.2, статически определимы, имеют одинаковое число стержней и узлов. Число связей достаточно, чтобы они были геометрически неизменяемыми (2У–С–Соп= 2*6–8–4=0). По внешнему виду системы мало отличаются одна от другой. Но первая является геометрически изменяемой а вторая –-
неизменяемой системой.
Рис. 2.2. К примеру 2.9
Установить это с помощью известных геометрических принципов образования систем вряд ли удастся. В подобных случаях приходится применять аналитическое решение.
Составляя уравнения равновесия узлов в виде проекций сил на оси Х и У при нулевой нагрузке в виде
76
Численные методы решения задач линейной алгебры
ì |
cosα jk N jk |
= 0 |
- проекция |
на |
ü |
ï- |
ось Х ,ï |
||||
ï |
åk |
|
|
|
ï |
2k уравнений í |
åsinα jk N jk |
|
|
|
ý |
ï |
= 0 |
- проекция |
на |
ï |
|
ï- |
осьУ, ï |
||||
î |
k |
|
|
|
þ |
где суммы содержат столько слагаемых, сколько стержней примыкает к рассматриваемому j-му узлу, получим следующую однородную систему линейных алгебраических уравнений:
AN = 0 ,
которая в случае Det A ¹ 0 должна иметь только нулевое решение, т.е. при нулевой нагрузке все усилия в стержнях фермы должны равняться нулю.
Здесь N – вектор неизвестных усилий в стержнях системы (включая опорные стержни), а элементами матрицы А являются синусы и косинусы углов наклона стержней к оси Х (рис.2.2,в).
Вид матрицы А зависит от нумерации узлов и стержней, но если ферма геометрически неизменяема, то определитель отличен от нуля при любой нумерации.
Для вариантов, показанных на рис.2.2, определитель матрицы А
имеет вид
|
cosα1 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
||||||||||||
|
sinα1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
0 |
0 |
|
|
−cosα1 |
0 |
cosα2 |
cosα3 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
−sinα1 |
0 |
sinα2 |
−sinα3 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
0 |
0 |
−cosα2 |
0 |
0 |
0 |
cosα2 |
0 |
0 |
0 |
0 |
0 |
|
detA = |
0 |
0 |
sinα2 |
0 |
0 |
0 |
sinα2 |
0 |
0 |
1 |
0 |
0 |
|
0 |
0 |
0 |
0 |
−cosα1 |
0 |
cosα2 |
cosα3 |
0 |
0 |
0 |
0 |
|
|
|
|
||||||||||||
|
0 |
0 |
0 |
0 |
−sinα1 |
0 |
sinα2 |
−sinα3 |
0 |
0 |
0 |
0 |
|
|
0 |
0 |
0 |
0 |
cosα1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
|
|
0 |
0 |
0 |
0 |
sinα1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
|
|
0 |
−1 |
0 |
−cosα3 |
0 |
1 |
0 |
cosα3 |
0 |
0 |
0 |
0 |
|
|
0 |
0 |
0 |
sinα3 |
0 |
0 |
0 |
sinα3 |
0 |
0 |
0 |
0 |
|
77

Численные методы решения задач линейной алгебры
Номер столбца соответствует номеру стержня. Для каждого узла составлено по два уравнения равновесия, т.е. занято по две строки. С учетом того, что:
для |
варианта а) |
sinα1= sinα2= sinα3=0,894, |
|
|
|
|
cosα1= cosα2= cosα3=0,447, |
|
|
для |
варианта б) |
sinα1=0,949, |
sinα2=0,832, |
sinα3=0,832, |
|
|
cosα1=0,316, |
cosα2=0,555, |
cosα3=0,555, |
определитель матрицы А для системы а) получается равным нулю, а для б) detA=0,192– отличен от нуля. Следовательно, первая стержневая система является геометрически изменяемой, а вторая – геометрически неизменяемой системой.
2.7. Вычисление обратной матрицы
Пусть дана неособенная матрица А=[aij] (i,j=1,2,..., n). Для
нахождения ее обратной матрицы используем основное соотношение:
АА-1=Е |
(2.50) |
где Е –- единичная матрица.
Обозначим элементы обратной матрицы αij . Тогда это
соотношение можно записать
éa11 |
a12 |
Ka1j |
K a1n ù |
éα11 α12 |
Kα1j K α1n ù |
|
é1 |
0 |
||
ê |
a22 |
Ka2 j |
ú |
ê |
α22 |
ú |
|
ê |
0 |
1 |
êa21 |
K a2n ú |
êα21 |
Kα2 j K α2n ú |
= |
ê |
|||||
|
|
|
× |
ê K K K K ú |
êK K |
|||||
êK K K K ú |
|
|||||||||
ê |
an2 |
|
ú |
ê |
αn2 |
ú |
|
ê |
0 |
0 |
êan1 |
Kanj K ann ú |
êαn1 |
Kαnj K αnn ú |
|
ë |
|||||
ë |
|
|
û |
ë |
|
û |
|
|
|
|
K0K 0 ù
K0K 0 úú K1K Kúú
K0K 1 û
Каждый столбец обратной матрицы можно считать вектором неизвестных
78
Численные методы решения задач линейной алгебры
|
|
éα1 j ù |
|
||
|
|
ê |
ú |
|
|
|
|
êα2 j ú |
|
||
X j = |
(j=1,2,..., n) |
||||
ê M |
ú |
||||
|
|
|
|||
|
|
ê |
ú |
|
|
|
|
êαnj ú |
|
||
|
|
ë |
û |
|
|
и для того, чтобы найти все элементы обратной матрицы, надо решить n систем линейных алгебраических уравнений, с одной и
той же матрицей коэффициентов А и разными векторами правой
части B j , содержащими одну единицу (при i=j), а остальные нули.
Следует отметить, что при решении этих n систем, например,
методом Гаусса, приведение матрицы А к треугольному виду делается только один раз. Поэтому обращение матрицы этим методом требует лишь в три раза больше действий, чем решение одной системы уравнений (обратный ход выполняется намного быстрее, чем прямой).
n Пример 2.10 Методом Гаусса найти обратную матрицу А -1 для
матрицы
|
|
|
é1 |
1 |
2ù |
|
|
|
|
|
|
ê |
|
4 |
ú |
|
|
|
|
A = ê3 |
1ú . |
|
|
|||
|
|
|
ê0 |
1 |
2ú |
|
|
|
Решение: |
|
|
ë |
|
|
û |
|
|
|
|
|
|
|
|
|
|
|
é1 1 2ù |
éα α |
|
α |
ù |
é1 0 0ù |
|||
ê |
ú |
ê 11 |
|
12 |
13 ú |
ê |
ú |
|
ê3 4 1ú |
× êα21 α22 α23 ú |
= ê0 1 0ú . |
||||||
ê |
ú |
ê |
α32 |
α |
ú |
ê |
ú |
|
ë0 1 2û |
ëα31 |
33 û |
ë0 0 1û |
|||||
Для нахождения элементов αij надо решить 3 системы линейных
é1 1 2ù
алгебраических уравнений с одинаковой матрицей А= êê3 4 1úú :
êë0 1 2úû
79

Численные методы решения задач линейной алгебры
éα11 |
ù é1ù |
|
éα12 |
ù é0ù |
|
éα13 |
ù é0ù |
||||||
ê |
ú ê |
ú |
; |
ê |
ú ê |
ú |
; |
ê |
ú ê |
ú |
|||
A × êα21 |
ú |
= ê0ú |
A × êα22 |
ú |
= ê1ú |
A × êα23 |
ú |
= ê0ú |
|||||
ê |
ú ê |
ú |
|
ê |
ú ê |
ú |
|
ê |
ú ê |
ú |
|||
ëα31 |
û |
ë0û |
|
ëα32 |
û |
ë0û |
|
ëα33 |
û |
ë1û |
|||
Приводя матрицу коэффициентов к треугольному виду и выполняя обратный ход для каждой системы, получаем:
|
é1 1 2 1ù é1 1 2 |
1 |
ù é1 1 2 |
|
1 ù |
|
éα11 |
ù |
é |
1 ù |
|
|||||||||||||
1) |
ê |
4 |
1 |
ú |
ê |
1 |
- 5 |
|
ú |
ê |
|
1 |
- 5 |
|
|
ú |
; |
ê |
ú |
ê |
ú |
; |
||
ê3 |
0ú |
= ê0 |
- 3ú |
= ê0 |
|
- 3ú |
êα21 |
ú |
= ê- 0,857ú |
|||||||||||||||
|
ê0 |
1 |
2 |
0ú |
ê0 |
1 |
2 |
0 |
ú |
ê0 |
|
0 |
7 |
|
3 |
ú |
|
êα |
ú |
ê |
0,428 ú |
|
||
|
ë |
|
|
|
û ë |
|
|
|
|
û ë |
|
|
|
|
|
û |
|
ë 31 |
û |
ë |
û |
|
||
|
é1 1 |
2 0ù |
é1 1 2 |
0ù |
|
é1 1 |
2 |
0 ù |
|
|
éα12 |
ù |
é |
0 ù |
|
|||||||||
2) |
ê |
4 |
1 |
ú |
ê |
1 |
- 5 |
ú |
|
ê |
1 |
|
-5 |
1 |
ú |
; |
|
ê |
ú |
ê |
ú |
; |
||
ê3 |
1ú |
= ê0 |
1ú |
= ê0 |
|
ú |
|
êα22 |
ú |
= ê |
0,286 ú |
|||||||||||||
|
ê0 |
1 |
|
2 |
0ú |
ê0 |
1 |
2 |
|
0ú |
|
ê0 |
0 |
|
7 |
-1ú |
|
|
êα |
ú |
ê- 0,143ú |
|
||
|
ë |
|
|
|
û |
ë |
|
|
|
û |
|
ë |
|
|
|
|
û |
|
|
ë 32 |
û |
ë |
û |
|
|
é1 1 |
2 0ù |
é1 1 2 |
0ù |
|
é1 1 |
2 0ù |
|
|
|
éα13 ù é |
-1 ù |
|
|||||||||||
3) |
ê |
4 |
1 |
ú |
ê |
1 |
- 5 |
ú |
|
ê |
1 |
|
-5 |
ú |
; |
|
|
ê |
ú |
ê |
ú |
|
||
ê3 |
0ú |
= ê0 |
0ú |
= ê0 |
|
0ú |
|
|
êα23 ú |
= ê0,714ú . |
|
|||||||||||||
|
ê0 |
1 |
|
2 |
1ú |
ê0 |
1 |
2 |
|
1ú |
|
ê0 |
0 |
|
7 |
1ú |
|
|
|
êα |
ú |
ê |
0,143ú |
|
|
ë |
|
|
|
û |
ë |
|
|
|
û |
|
ë |
|
|
|
û |
|
|
|
ë 33 û ë |
û |
|
||
2.8. Нахождение собственных значений и собственных векторов матриц
Собственные векторы и собственные значения являются характеристиками матрицы и играют большую роль в решении технических задач, в частности, задач динамики и устойчивости зданий и сооружений [12].
2.8.1. Вводные замечания
Пусть А = [aij] – квадратная матрица n-го порядка с действительными элементами и λ – некоторое неизвестное. Тогда матрица А–λЕ называется характеристической матрицей матрицы
А (здесь Е – единичная матрица):
80
Численные методы решения задач линейной алгебры
éa |
11 |
- λ |
a |
L |
a |
1n |
ù |
|
ê |
|
12 |
|
|
ú |
|
||
A - λE = ê |
a21 |
a22 - λ |
L |
a2n |
ú |
(2.51). |
||
ê |
L |
L |
L |
L |
ú |
|
||
ê |
an1 |
an2 |
|
|
|
ú |
|
|
ë |
L ann - λû |
|
||||||
Определитель этой матрицы называется
характеристическим определителем и равен
|
a11 - λ |
a12 |
L |
a1n |
|
|
|
|
|||||
D(λ) = det(A - λE) = |
a21 |
a22 - λ |
L |
a2n |
(2.52) |
|
L |
L |
L |
L |
|||
|
|
|||||
|
an1 |
an2 |
L ann - λ |
|
||
В развернутом виде det (A −λE) есть многочлен (полином) n-й степени от λ :
D(λ) = (-1)n [λn - p λn−1 |
+ p |
2 |
λn−2 |
-K+ (-1)n p |
n |
], |
(2.53) |
1 |
|
|
|
|
|
называемый характеристическим многочленом матрицы А. Числа
р1,р2,..., р n называются коэффициентами характеристического многочлена. λ1, λ2,..., λn, называются характеристическими числами или собственными значениями матрицы А.
Ненулевой вектор X = (x1, x2 ,K, xn ) называется собственным
вектором матрицы А, если эта матрица переводит вектор X в
вектор
A |
X |
= λ |
X |
, |
|
|
(2.54) |
|
т.е. произведение матрицы А на вектор |
|
и произведение |
||||||
X |
||||||||
характеристического числа λ на вектор |
|
|
есть один и тот же |
|||||
X |
||||||||
вектор. |
|
|
||||||
Таким образом, каждому собственному значению λi матрицы соответствует свой собственный вектор Xi (i=1,2,...,n).
Для определения координат собственного вектора составим уравнение
81
Численные методы решения задач линейной алгебры
(A - lE) |
X |
= 0 . |
(2.55), |
Переписав его в виде
éa |
|
- l |
||
ê |
11 |
|
|
|
ê |
|
a21 |
||
êê |
|
L |
||
ê |
|
an |
1 |
|
ë |
|
|
|
|
a |
L |
a |
ù |
é x |
ù |
é0ù |
|
||||
12 |
|
1n |
ú |
ê |
|
1 |
ú |
ê |
|
ú |
|
a22 - l |
L |
a2n |
ú |
× êx |
2 ú |
= ê0ú |
(2.56), |
||||
L |
L |
L |
ú |
ê |
M |
ú |
êM |
ú |
|
||
an2 |
|
|
ú |
ê |
x |
|
ú |
ê |
0 |
ú |
|
L ann - lú |
ë |
n |
û |
ë |
û |
|
|||||
|
|
|
û |
|
|
|
|||||
и выполнив умножение, получим систему линейных однородных
уравнений
(a11 - λ)x1 + |
a12x2 + ... + a1nxn |
=0, |
||
a21x1 |
+(a2 2 -λ)x2 + ... |
+ a2nxn |
=0, |
|
.............................................................. |
|
|
|
(2.57) |
an1x1 |
+ |
an2x2 + ... |
+(ann -λ)xn |
=0. |
Данная система имеет нетривиальное (ненулевое) решение только в том случае, когда определитель, составленный из коэффициентов при неизвестных х1, х2,…, хn, равен нулю, т.е.
|
a11 - l |
a12 |
L |
a1n |
|
|
|
||||
D(l) = det(A - lE) = |
a21 |
a22 - l |
L |
a2n |
= 0 . (2.57a ) |
L |
L |
L |
L |
||
|
an1 |
an2 |
L ann - l |
|
|
Уравнение (2.57a) называется характеристическим (частотным –
в теории колебаний) или вековым (это название возникло в связи с
задачами небесной механики о периодических отклонениях планет от своих орбит). Искомой величиной в нем является собственное значение l.
При решении задач о собственных колебаниях системы с n
степенями свободы обычно получается система
82