

1.2 Механические характеристики производственных механизмов при типовых нагрузках Для теории и практики электропривода большое значение имеют понятия механической характеристики рабочей машины.
![]() или
или
![]()
Механические характеристики являются одним из основных критериев при выборе типа двигателя для исполнительного механизма. Аналитически механические характеристики многих производственных механизмов можно выразить эмпирической формулой Бланка:
![]() ,
где
,
где
Мс
и Мсн
– статические моменты сопротивления
механизма соответственно при скорости
![]() и
и![]() ;
;
Мо – момент холостого хода (трения) механизма, не зависящий от скорости.
Механические характеристики производственных механизмов при наиболее характерных видах нагрузок (типовых нагрузках) можно разделить на следующие классы:
1. Не зависящие от скорости (см. рис. 1.2).
При этом Х=0 и ее уравнение Мс=Мсн. Такую характеристику имеют механизмы, служащие для подъема груза, или механизмы, в которых сопротивление движению оказывают силы сухого трения.
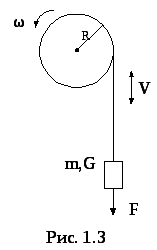
Сила тяжести, как при подъеме, так и при спуске груза направлена в сторону спуска и неизменна по значению. Механическая характеристика в этом случае имеет вид прямой 1, Мс в этом случае зависит от массы груза: Мс=GR=mgR (рис 1.3) и может изменяться в пределах от Мс=0 (G=0) до Мс=Мсн (G=Gн).

Для
снижения рабочей нагрузки установки с
тяжелыми грузоподъемными устройствами
обычно выполняются уравновешенными.
Примером может служить лифтовый подъемник
или шахтный подъемник с противовесом.
В данном случае полезная нагрузка
механизма определяется разностью сил
натяжения каната со стороны кабины F
и со стороны противовеса F1,
т.е.
![]() ;
или
;
или![]()
Сила Fмех (Мс) не зависит от скорости, не изменяется при изменении направления движения, но в отличие от предыдущего примера, соответствующего рис 1.3. как при подъеме, так и при спуске кабины может иметь различный знак в зависимости от массы поднимаемого груза. Так, при G>G1, полезная нагрузка имеет тот же знак, что и в случае неуравновешенного подъемника (прямая 1 на рисунке 1.2).
При G=G1, Мс=0, а при G<G1, т.е. при перемещении ненагруженной кабины направление полезной нагрузки механизма меняется на противоположное (прямая 1`).

Характеристика
![]() для нагрузки типа сухого трения также
не зависит от скорости, но зависит от
ее знака (прямая 2 и 2').
для нагрузки типа сухого трения также
не зависит от скорости, но зависит от
ее знака (прямая 2 и 2').
2. Линейно-возрастающая (прямая 3).
В
этом случае х=1 и Мс
линейно зависит от
![]() .
Такая характеристика имеет место в
приводе генератора независимого
возбуждения при его работает на постоянное
внешнее сопротивление. Это нагрузка
типа вязкого трения. В этом случае
.
Такая характеристика имеет место в
приводе генератора независимого
возбуждения при его работает на постоянное
внешнее сопротивление. Это нагрузка
типа вязкого трения. В этом случае![]() ,
где
,
где![]() – коэффициент пропорциональности. На
практике такая нагрузка встречается
редко. С учетом момента холостого хода
характеристика имеет вид пунктирной
прямой 3'.
– коэффициент пропорциональности. На
практике такая нагрузка встречается
редко. С учетом момента холостого хода
характеристика имеет вид пунктирной
прямой 3'.
3. Параболическая характеристика (кривая 4).
Ей соответствует х=2. Момент Мс зависит от квадрата скорости.
Такую характеристику имеют механизмы, работающие по центробежному принципу (центробежные насосы), вентиляторы, дымососы и т.п. Момент сопротивления таких механизмов часто называют вентиляторными.
4. Нелинейно спадающая характеристика (кривая 5).
Ей соответствует х=-1.
Момент Мс изменяется обратно пропорционально скорости, а мощность на валу механизма остается постоянной. Такую характеристику имеют некоторые токарные, расточные, фрезерные и др. металлорежущие станки, моталки рулонной жести в металлургической промышленности.

При
наличии у рабочей машины кривошипно-шатунной,
кулисной, карданной передачи, нагрузка
зависит от угла поворота рабочего
органа. Момент Мс в этом случае
![]() ,
где Мо – момент холостого хода (см. рис.
1.5).
,
где Мо – момент холостого хода (см. рис.
1.5).
К механизмам, имеющим такой Мс, относятся поршневые компрессоры, прессы, ножницы для резки металла, механизмы копания роторного экскаватора, шахтные подъемники с неуравновешенным канатом и др.