

5.3 Системы управляемый преобразователь – двигатель (уп–д)
При автоматическом регулировании координат электропривода в качестве управляющего воздействия может быть выбран любой параметр, оказывающий влияние на регулируемую переменную. В случае электроприводов постоянного тока наиболее высокая управляемость обеспечивается изменением напряжения, подводимого к якорной цепи двигателя при Ф=const, а в случае асинхронных и синхронных электроприводов – изменением частоты и величины приложенного напряжения. Для реализации этих возможностей питание двигателя должно осуществляться от управляемого источника.
В случае двигателей постоянного тока в качестве такого источника используется генераторы постоянного тока или статические (тиристорные) преобразователи переменного тока в постоянный, а для частотного управления электроприводами с АД и СД – синхронные генераторы, тиристорные или транзисторные преобразователи частоты. Получающиеся во всех этих случаях системы электропривода с управляемым индивидуальным источником питания, называются системами УП-Д (управляемый преобразователь–двигатель). Рассмотрим основные свойства этих систем, их математическое описание, их достоинства и недостатки, возможности регулирования координат.
5.4 Система генератор–двигатель постоянного тока (г–д)
Принципиальная схема системы Г–Д без обратных связей изображена на рис. 5.4.1. В качестве управляемого преобразователя в ней используется генератор постоянного тока независимого возбуждения, приводимый во вращение асинхронным или синхронным двигателем, который называется гонным или сетевым. В качестве приводного двигателя рабочей машины используется двигатель независимого возбуждения (ДНВ).
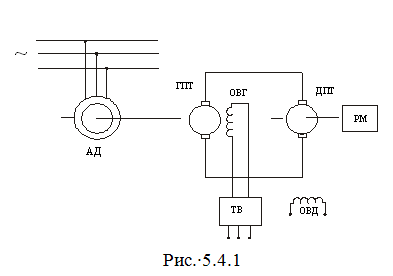
Пуск системы осуществляется включением сетевого двигателя, вращающего генератор. Приводной двигатель перед этим должен быть полностью возбужден, т.е. его Ф должен быть равен ФН.
Напряжение на обмотке возбуждения генератора должно быть равно 0.
При подаче напряжения на обмотку возбуждения генератора и его увеличении, он будет развивать ЭДС, появится напряжение на обмотке якоря ДПТ, и последний будет разгоняться. При номинальном возбуждении генератора напряжение на якоре ДПТ должно быть номинальным (при холостом ходе ДПТ).
В случае сетевого АД с увеличением нагрузки на валу приводного ДПТ возрастает тормозной момент ГПТ, что вызывает снижение скорости гонного АД, следовательно, снижение скорости ГПТ и его ЭДС, что, в свою очередь сказывается и на напряжении якоря ДПТ и его скорости. В мощных электроприводах по системе ГД это снижение составляет (1,52)%.
Преимуществом асинхронного гонного двигателя является простота, надежность, дешевизна, малая колебательность. Достоинством гонного СД является его меньшая критичность к колебаниям напряжения сети, возможность работать с опережающим током. Обычно СД используется при мощностях генератора порядка сотен и тысяч кВт.
Питание обмотки возбуждения ГПТ в современных системах ГД, осуществляется от тиристорного или транзисторного преобразователей, обладающих высоким быстродействием и большим коэффициентом усиления по мощности. Зависимость выходного напряжения тиристорного возбудителя от UУ изображена на рис.5.4.2.
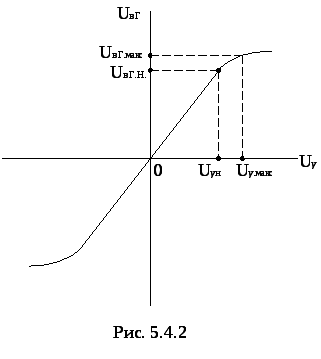
Ее рабочий участок без особой погрешности можно считать линейным. Динамические процессы в ТВ описывается уравнением.
![]() ,
где
,
где
![]() –коэффициент
усиления ТВ по напряжению:
–коэффициент
усиления ТВ по напряжению:
ТТВ – электромагнитная постоянная ТВ, не превышающая 0,01с.
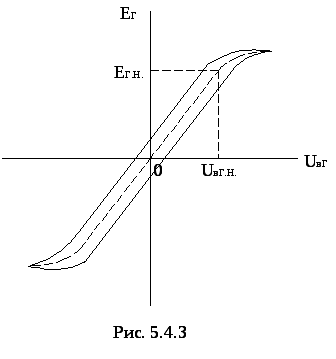
Пренебрегая гистерезисом магнитной цепи генератора, и считая его ненасыщенным, для линейного участка зависимости EГ=f(UВГ), которой можно заменить петлю гистерезиса (рис. 5.4.3), можно написать:
![]() ,
где
,
где
![]() –коэффициент
усиления генератора по напряжению при
Г=const;
–коэффициент
усиления генератора по напряжению при
Г=const;
![]() –электромагнитная
постоянная цепи возбуждения генератора.
–электромагнитная
постоянная цепи возбуждения генератора.
Уравнение механической характеристики двигателя в системе ГД можно получить из уравнения равновесия ЭДС в якорной цепи.
![]() ,
где еГ
и е – соответственно ЭДС генератора и
противо ЭДС двигателя.
,
где еГ
и е – соответственно ЭДС генератора и
противо ЭДС двигателя.
Т.к.
![]() ,
где Ф – поток двигателя, то
,
где Ф – поток двигателя, то
![]() .
.
В
этих выражениях
![]()
Выразив ток iя через момент двигателя получим:
![]() или
или
![]() ,
,
или
![]()
Здесь – модуль статической жесткости механической характеристики двигателя в системе Г–Д.
В установившемся режиме р=0 и уравнение статической механической характеристики в виде:
![]() или
или
![]()
Семейство механических характеристик двигателя в системе Г–Д, соответствующих различным значениям потока возбуждения генератора, следовательно, различным значениям ЭДС при синхронном гонном двигателе, изображено на рис. 5.4.4.
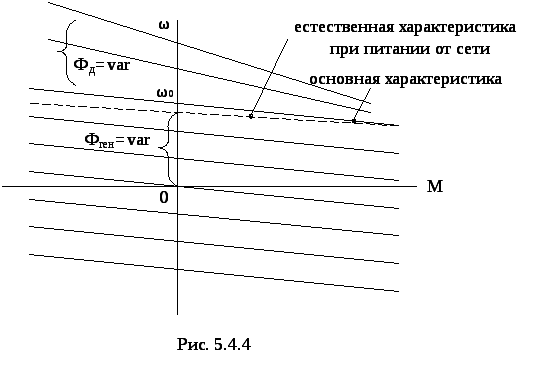
Жесткость основной характеристики двигателя в 2 раза меньше, чем при питанием его от сети с U=const, вследствие того, что в якорной цепи кроме сопротивления обмотки якоря двигателя имеется еще и сопротивление якорной цепи генератора, а они одинаковы, т.к. мощность генератора лишь немногим больше мощности двигателя. Но вот скорость идеального холостого хода, двигателя в разомкнутой системе Г-Д больше, чем при питании его от сети с U=const, т.к. номинальная ЭДС генератора, определяющая 0 двигателя, больше, чем номинальное напряжение двигателя, определяющее 0 при питании его от сети, т.е.
![]() ,
ибо
,
ибо
![]() .
.
Изменяя поток возбуждения генератора, следовательно, его ЭДС, можно осуществить непрерывное плавное управление моментом и скоростью электропривода во всех 4-х квадрантах координатной системы при =const. В разомкнутой системе Г-Д за счет изменения потока генератора, следовательно, его ЭДС, можно получить диапазон регулирования скорости двигателя примерно 10:1. Изменяя же поток двигателя (ослабляя его), можно увеличить скорость примерно еще в 3 раза. Т.о. общий диапазон регулирования скорости в разомкнутой системе Г-Д примерно 30:1. На рис. 5.4.4 показаны характеристики двигателя и в зоне изменения потока двигателя. Они расположены выше основной и жесткость их изменяется.
Механические характеристики двигателя в системе Г-Д при асинхронном гонном двигателе будут не параллельны, т.к. при изменении нагрузки на валу приводного двигателя будет изменяться скорость гонного двигателя, следовательно, и ЭДС генератора, что, в свою очередь, сказывается и на скорости приводного двигателя. Обычно непараллельностью характеристик при расчетах пренебрегают.
Двигатель в системе Г-Д может работать во всех режимах. Двигательному режиму соответствуют механические характеристики в первом и третьем квадрантах. Режиму динамического торможения соответствует одна характеристика, проходящая через начало координат. Режиму противовключения соответствует область между осью моментов и характеристикой динамического торможения во 2-м и 4-м квадрантах. Генераторному режиму с рекуперацией энергии в сеть соответствует область во 2-м и 4-м квадрантах между осью скоростей и характеристикой динамического торможения.
Основным
способом торможения двигателя в системе
Г-Д является рекуперативное. Для получения
этого режима необходимо уменьшать или
снять возбуждение генератора. ЭДС
двигателя станет больше ЭДС генератора.
Двигатель превратиться в генератор.
Ток в якорной цепи, определяемый
разностью:
![]() ,
изменит направление на противоположное.
Генератор превратиться в двигатель,
работающий с ослабленным магнитным
потоком. Скорость его увеличится и он
будет раскручивать ротор гонного
двигателя, если он асинхронный, со
сверхсинхронной скоростью. Гонный
двигатель превратится в генератор и
будет отдавать в сеть активную энергию,
потребляя реактивную. Если же гонным
двигателем является синхронный, то
скорость его не может возрасти, т.к. она
определяется частотой напряжения сети,
к которой он подключен (
,
изменит направление на противоположное.
Генератор превратиться в двигатель,
работающий с ослабленным магнитным
потоком. Скорость его увеличится и он
будет раскручивать ротор гонного
двигателя, если он асинхронный, со
сверхсинхронной скоростью. Гонный
двигатель превратится в генератор и
будет отдавать в сеть активную энергию,
потребляя реактивную. Если же гонным
двигателем является синхронный, то
скорость его не может возрасти, т.к. она
определяется частотой напряжения сети,
к которой он подключен (![]() )
Но под действием вращающего момента
генератора, превратившегося в двигатель,
ось магнитного поля его ротора будет
не отставать, а опережать ось магнитного
поля статора и он превратится в генератор,
отдавая в сеть активную энергию. Что
касается реактивной энергии, то он будет
ее потреблять, если работает в режиме
недовозбуждения, а если он перевозбужден,
то будет отдавать ее в сеть
)
Но под действием вращающего момента
генератора, превратившегося в двигатель,
ось магнитного поля его ротора будет
не отставать, а опережать ось магнитного
поля статора и он превратится в генератор,
отдавая в сеть активную энергию. Что
касается реактивной энергии, то он будет
ее потреблять, если работает в режиме
недовозбуждения, а если он перевозбужден,
то будет отдавать ее в сеть
С помощью приведенных выше уравнений динамики для цепи возбуждения генератора, тиристорного возбудителя, уравнения механической характеристики двигателя и уравнения движения электропривода при жестких механических связях, можно построить структурную схему системы Г-Д, которая изображена на рис. 5.4.5.
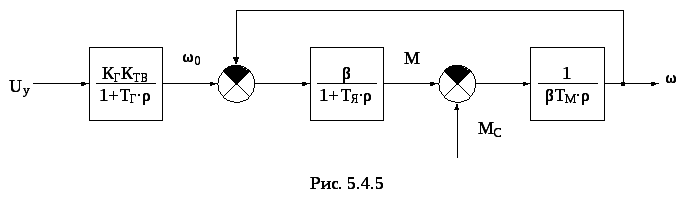
Из нее следует, что при изменении управляющего воздействия скачком ЭДС генератора и скорость 0 двигателя в системе Г-Д изменяются по закону, определяемому переходной функцией апериодического звена с постоянной ТГ=ТВ.
К достоинства системы Г-Д относятся следующие:
Отсутствуют громоздкие пусковые реостаты и потери в них.
Легкая управляемость электродвигателем.
Напряжение на зажимах двигателя не искаженно в/r.
Управление процессами перенесено в цепи возбуждения, имеющие небольшие токи, что облегчает и удешевляет аппаратуру.
Сравнительно высокий диапазон регулирования скорости (~30:1) даже в разомкнутой системе.
Относительно небольшое потребление реактивной мощности даже при асинхронном гонном двигателе.
Недостатки системы Г-Д:
Высокая установленная мощность, превышающая в 3-4 раза мощность приводного двигателя.
Высокая первоначальная стоимость машинного оборудования.
Большая занимаемая площадь и необходимость громоздких фундаментов в мощных системах.
Повышенный шум при работе машин.
Повышенная крутизна механических характеристик.
Сравнительно низкий КПД, равный произведению КПД машин, входящих в систему
 .
.