

Шумахер У. Полупроводниковая электроника
.pdfINFSEMI_2-Text.fm, стр. 392 из 589 (September 3, 2010, 17:07)
392 9. Полупроводниковые устройства для автомобилей
12-вольтовая система |
|
42-вольтовая система |
|
Аккумулятор |
Зажигание |
|
Аккумулятор |
30 |
|
15 |
'30' |
31 |
'31' |
Обозначения выводов аккумулятора |
30 + 15 и 31 |
'30' и '31' |
Ёмкость аккумулятора |
800 Вт·ч |
800 Вт·ч |
Напряжение и ёмкость аккумулятора |
12 В, 66 А•ч |
36 В, 22 А•ч |
Ток покоя электрооборудования автомобиля |
18 мА |
6 мА |
Ток покоя каждого электронного блока |
300 мкА |
менее 100 мкА |
Рис. 9.50. Иллюстрация проблем с токами покоя в 42-вольтовых системах электропитания автомобиля.
Требования по току покоя и питание
в42-вольтовых системах
В12-вольтовых системах электропитания очень важно обеспечить малый ток покоя — ток потребления схем электрооборудования в режиме, когда двигатель транспортного средства выключен. Это гарантирует, что аккумуляторная батарея спустя несколько недель простоя окажется заряженной настолько, что сможет обеспечить запуск двигателя. В 42-вольтовых системах электропитания эта проблема встанет ещё более остро, и тому есть две причины. Вопервых (см. Рис. 9.50), будем исходить из того, что в обеих рассматриваемых системах используются аккумуляторные батареи одинаковых габаритов, запасающие одинаковую энергию при полной зарядке до напряжения 14 В и 42 В соответственно. Например, если в 12-вольтовой системе за-
действован аккумулятор ёмкостью 66 А·ч, то такой же 36-вольтовый1) аккумулятор будет иметь ёмкость 22 А·ч. Пусть ток покоя электрооборудования автомобиля при напряжении питания 12 В составляет, скажем, 18 мА (примерно 300 мкА на каждый электронный блок). Соответствующие значения для 42-вольтовой системы питания составят 6 мА на весь автомобиль и 100 мкА (или даже значительно меньше) на каждое из его электронных устройств. Таким обра-
зом, требования по току покоя ужесточились в три раза.
Во-вторых, в будущем в составе автомобильного электрооборудования появится ещё больше полупроводниковых ключей с большим энергопотреблением, питающихся непосредственно от аккумуляторной батареи автомобиля (через вывод «30» аккумулятора, изображённого на Рис. 9.50). Классическая схема с реле зажигания (через вывод «15» на том же рисунке) используется всё реже и реже, поскольку эта функция реализуется на современной элементной базе с помощью полупроводниковых ключей и соответствующего программного обеспечения. Однако это существенно увеличивает количество электронных устройств, что приводит к росту тока покоя. Другими словами, силовые полупроводниковые компоненты для 42-вольтовых систем должны быть оптимизированы по току покоя. То же самое относится и к интегральным стабилизаторам напряжения. Компания Infineon в качестве решения этой проблемы предлагает использовать целый ряд различных технологических новинок.
Линейные стабилизаторы напряжения едва ли будут использоваться в 42-вольто- вых автомобильных системах электропитания, поскольку потери мощности в них оказываются слишком большими. Снижение напряжения питания цифровых схем с
1) Как уже обсуждалось выше (см. подраздел 9.6.1), величина 36 В относится к номинальному напряжению аккумулятора (в режиме холостого хода); в рабочем же режиме он заряжен до 42 В. — Примеч. пер.
INFSEMI_2-Text.fm, стр. 393 из 589 (September 3, 2010, 17:07)
9.6. Новые 42-В системы электропитания автомобиля 393
I |
|
Q |
Традиционное |
|
VI |
|
VQ |
|
|
|
|
|
||
470 нФ |
TLE 4271 |
22 мкФ |
|
решение |
INH |
RO |
Ток покоя: |
||
VINH |
TLE 4271-2 |
VRO |
> 800 мкА при IQ = 0 мА |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КПД: |
VW |
W |
|
|
|
|
|
|
|
|
|
|
D |
|
|
12 % при 300 мА |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
CO |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
GND |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ток покоя:
< 100 мкА при IQ = 0 мА
КПД:
76 % при 300 мА
Новая |
|
концепция |
|
импульсного |
|
источника |
питания |
|
|
VI |
I |
|
BTS |
|
|
|
|
22 нФ |
LDU = |
||
22 мкФ |
|
TLE 6371 |
|
||
VINH |
INH |
Q |
47 мкГн |
||
(P-DSO-8) |
VQ |
||||
|
|
||||
|
|
|
|
W |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RO |
|
DBU |
10 мкФ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
VW |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VRO |
|
|
|
|
|
|
|
|
|
|
|
GND |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
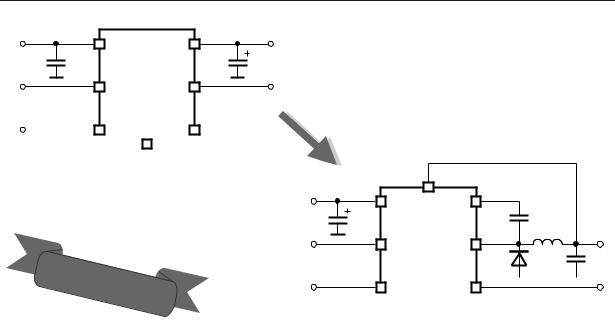
Рис. 9.51. Предложения по созданию универсального импульсного стабилизатора напряжения для работы в 42-вольтовых системах электропитания.
5 В до, скажем, 2.5 В, ещё более усугубляет эту проблему. Так, линейный стабилизатор с выходным напряжением 2.5 В и током нагрузки 200 мА при входном напряжении 50 В будет рассеивать 9.5 Вт мощности. Потери мощности в импульсном стабилизаторе при тех же условиях составят приблизительно 200 мВт, что гораздо меньше, чем даже потери в нынешних, 12-вольтовых линейных стабилизаторах. Столь низкий уровень потерь открывает возможности по интеграции стабилизаторов напряжения непосредственно в базовые системные ИС.
Идея создания универсального импульсного стабилизатора напряжения для 42-вольтовых автомобильных систем электропитания, функционально соответствующего популярному интегральному стабилизатору TLE 4271, проиллюстрирована на Рис. 9.51. Особое внимание при проектировании нового прибора уделено минимизации тока покоя, повышению КПД в номинальном режиме работы и снижению уровня помех без существенного удорожания схемы фильтрации.
Подводя некоторый итог, следует подчеркнуть, что импульсные стабилизаторы напряжения в новых 42-вольтовых системах бортового электропитания в общем обеспечивают снижение стоимости полупроводниковых компонентов по сравнению с линейными стабилизаторами напряжения 14-вольтовых систем. Однако могут возник-
нуть дополнительные затраты, связанные с использованием катушек индуктивности и реализацией схем фильтрации выходного напряжения. Во многих случаях эти затраты компенсируются тем, что импульсные источники питания имеют более высокий КПД, меньшие потери мощности и, следовательно, вызывают гораздо меньше проблем с теплоотводом.
Проблема коротких замыканий в комбинированных системах бортового электропитания автомобилей
Одной из наиболее серьёзных проблем в проектировании комбинированных (14 В + + 42 В) систем бортового электропитания автомобилей является опасность коротких замыканий (КЗ) между линиями 14 В и 42 В. Немного забегая вперёд, скажем, что стопроцентного решения этой проблемы с использованием простых методик до сих пор не существует.
Возможные пути возникновения коротких замыканий в подобных системах показаны на Рис. 9.52. Во-первых, теоретически существует вероятность короткого замыкания непосредственно между аккумуляторами (путь А1—Б1) и полностью исключить такую вероятность можно лишь с использованием специальных конструкторских решений. То же самое относится и к возможному короткому замыканию по пути А2—Б2, даже несмотря на то, что интеллектуальный модуль

INFSEMI_2-Text.fm, стр. 394 из 589 (September 3, 2010, 17:07)
394 9. Полупроводниковые устройства для автомобилей
А1 |
12 В |
IBK |
36 В
IBK
Б1
А2 |
|
|
А3 |
|
|
|
14 В |
|
|
|
|
12 В |
|
M |
|
|
5 В |
|
|
14 В |
42 В |
Микроконт- |
|
|
|
|
роллер и т.д. |
|
|
|
|
|
|
Б3 |
|
|
42 В |
|
|
G |
|
SAM |
M |
M |
|
Б2 |
|||
|
|
|
|
|
|
Источник: Daimler Chrisler |
|
|
|
Рис. 9.52. Возможные пути протекания тока в системах с двумя напряжениями питания.
коммутации аккумулятора (IBK) обеспечивает при определённых условиях достаточную защиту от подобных замыканий.
С наибольшей вероятностью короткие замыкания могут возникать на выходах уст- ройств-потребителей электропитания (путь А3—Б3), и на этом уровне необходимо предусмотреть максимально надёжную электрическую защиту. На Рис. 9.53 более подробно представлены возможные сценарии возникновения коротких замыканий. В общем случае, следует различать варианты 1 — высокоомное короткое замыкание между линиями питания 42 В и 14 В с током короткого замыкания, например, 5 А, и 2 — с током короткого замыкания, скажем, 100 А.
В варианте 1 транзисторный 42-вольто- вый ключ, рассчитанный на коммутацию токов до 10 А, будет работать в обычном режиме и не среагирует на короткое замыкание. Таким образом, задача детектирования короткого замыкания ложится на контроллер питания 14 В, в то время как источник питания должен без повреждений выдерживать это короткое замыкание до его обнаружения и устранения. Ток короткого замыкания будет протекать в источнике питания 14 В через обратный диод выходного транзистора и далее через плавкий предохранитель на аккумуляторную батарею 14 В. Симптомом наличия короткого замыкания может быть об-
|
42-В контроллер |
|
|
|
42 В |
|
D |
S |
M |
|
|
|
||
|
|
G |
|
|
|
|
|
42 В |
1: ток КЗ |
|
|
|
|
|
|
|
|
|
= 5 А |
|
|
VDS < 0 |
|
2: ток КЗ |
|
|
|
= 100 А |
|
|
14-В контроллер |
|
|
|
14 В |
В |
D |
S |
M |
|
|
|||
|
16 |
G |
|
|
|
> |
|
|
|
|
|
|
|
|
|
bat |
|
|
|
|
V |
|
|
|
|
|
D |
S |
|
|
|
G |
|
|
|
12 В |
|
|
|
|
5 В |
|
|
|
Канал |
Микро- |
|
|
|
контроллер |
|
|
||
аварийного |
|
|
||
и т.д. |
|
|
|
|
отключения |
|
|
|
|
|
|
|
|
|
Рис. 9.53. Проблема коротких замыканий |
||||
между линиями питания 42 В и 12 В и возмож- |
||||
|
ные пути её решения. |
|
||
INFSEMI_2-Text.fm, стр. 395 из 589 (September 3, 2010, 17:07)
9.7. Достоинства и проблемы технологий электронного управления оборудованием 395
ратное смещение на выходном транзисторе источника питания 14 В (VDS < 0) или превышение выходным напряжением этого источника питания номинального значения (14 В) с последующим его ограничением схемой защиты на стабилитронах (например, на уровне Vbat > 16 В). После выявления факта короткого замыкания можно отследить ключ в источнике питания 42 В, вызвавший это короткое замыкание, и отключить его. В результате ток короткого замыкания перестаёт течь. Процесс обнаружения и отключения «виновника» короткого замыкания обычно длится несколько секунд, и в течение этого времени источник питания 14 В должен без повреждений выдерживать протекание тока короткого замыкания, хотя подключённая к нему нагрузка может в итоге выйти из строя.
В варианте 2 условия совершенно иные. Большой ток короткого замыкания должен детектироваться контроллером источника питания 42 В и отключаться не позже, чем через несколько микросекунд. Исследования показали, что за такое короткое время даже 14-вольтовые интеллектуальные интегральные коммутаторы, реализованные на относительно небольших и чувствительных ключах в корпусах SO, не получают серьёзных повреждений.
Особенно сложно противостоять коротким замыканиям, представляющим собой нечто среднее между рассмотренными вариантами 1 и 2. Обеспечить стопроцентную защиту — задача, требующая слишком больших издержек, а то и вовсе невыполнимая. Максимум, что можно сделать, — это решить проблему защиты от коротких замыканий с некоторой долей вероятности.
Итак, внедрение 42-вольтовых систем бортового питания в состав автомобильного электрооборудования, с одной стороны, имеет множество плюсов и влечёт за собой появление новых возможностей. Но с другой стороны, в связи с этим существует ещё немало насущных проблем, требующих решения.
Заключение
Если процесс дальнейшей электрификации автомобилей будет выражаться, главным образом, в оптимизации тех или иных функций или узлов (т.е. механические устройства будут заменяться на электромеханические и электрические), то для решения
возникающих проблем может и должна использоваться электроника. Это далеко не всегда означает необходимость применения новых полупроводниковых компонентов; часто речь идёт об использовании доступных функций уже имеющихся компонентов (например ШИМ), чтобы избежать проблемных ситуаций с минимальными затратами. Будущее в области автомобильных технологий — за электроникой.
9.7.Достоинства и проблемы технологий электронного управления оборудованием
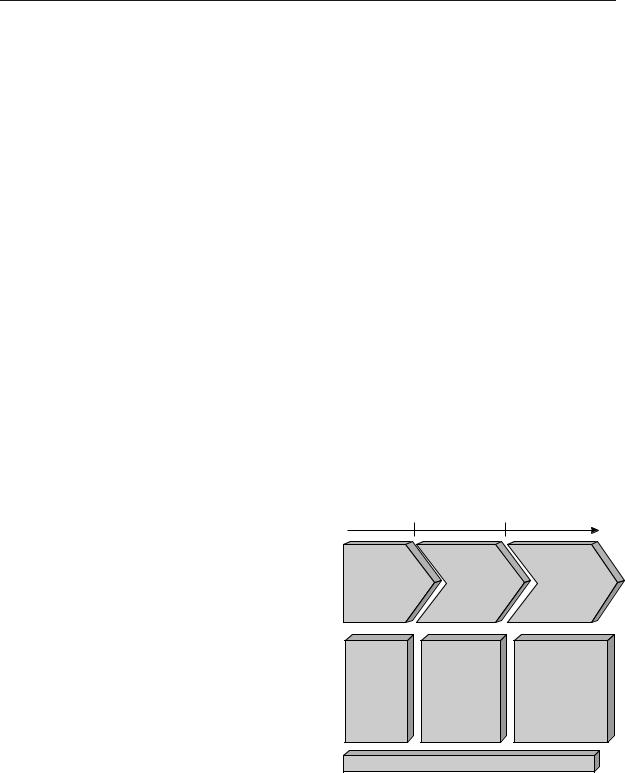
Современные технологии электронного управления по проводам (x-by-wire) в автомобилях открывают новые перспективы не только в таких востребованных областях, как электронные рулевые и тормозные системы, электронное управление двигателем (e-gas) или электрические стеклоподъёмники, но и могут быть использованы во множестве других приложений. Постоянно растущие требования к функциональности, безопасности и экономичности автомобильного оборудования сталкиваются с физическими и технологическими ограничениями (Рис. 9.54).
|
1995 |
2005+ |
||
систем |
|
|
|
Системы |
Системы |
|
Системы |
на уровне |
|
Развитие |
на уровне |
|
на уровне |
управления |
платы |
|
автомобиля |
дорожной |
|
применения |
|
|
|
обстановкой |
Транс- |
|
Контроль |
Информационно- |
|
|
миссия |
безопасности |
развлекательные |
|
|
|
|
Системы |
системы |
|
|
|
|
|
|
Системы |
|
курсовой |
Интеллектуальные |
|
|
устойчивости |
транспортные |
|
Области |
управления |
|
||
|
Электронное |
системы (ITS) |
||
двигателем |
|
|||
|
|
|||
|
|
управление |
|
|
|
|
|
|
|
|
|
|
тормозами |
|
|
Системы обеспечения комфорта |
|||
Рис. 9.54. Тенденции развития автомобильных электронных систем и их приложений.
Различные исследования показывают, что лишь путём совершенствования электроники и программного обеспечения можно достичь желаемого уровня индивидуализации и улучшить функциональные возможности автомобильного оборудования (в первую очередь, это относится к замене ме-

INFSEMI_2-Text.fm, стр. 396 из 589 (September 3, 2010, 17:07)
396 9. Полупроводниковые устройства для автомобилей
ханических и гидравлических систем управления исполнительными устройствами на электрические). По мере того как возрастает насыщенность автомобилей электроникой, неизбежно увеличивается и сложность электронных систем. В дальнейшей перспективе — их объединение в комплексную систему, соответствующую требованиям обеспечения безопасности.
9.7.1. Системные требования
Требования к автомобильному электронному оборудованию основываются на необходимости удовлетворения следующих условий:
соответствие требованиям охраны окружающей среды и нормативных документов;
повышение уровня безопасности дорожного движения;
обеспечение максимального комфорта для водителей и пассажиров при езде;
снижение расходов, в том числе на техническое обслуживание.
Соответствие требованиям охраны окружающей среды, в первую очередь, следует понимать как поддержание необходимого энергетического баланса в течение всего срока службы транспортного средства, начиная со стадии производства и вплоть до его утилизации. Понятие безопасности в настоящее время также рассматривается шире, чем просто защита пассажиров транспортного средства от повреждений при ДТП, и подразумевает меры, позволяющие предотвратить сами ДТП. Комфортабельность и получение удовольствия от езды является важной характеристикой при выборе автомобиля той или иной марки и определяется наличием индивидуальных, адаптированных под конкретных пользователей возможностей оборудования. Что же касается стоимостных характеристик, то и здесь применим комплексный подход, когда в расчёт берётся не только цена отдельных компонентов или подсистем транспортного средства, но и затраты на его производство, техническое обслуживание и, наконец, утилизацию.
Структура аппаратных и программных средств должна быть масштабируемой и в рамках получения максимально возможной экономической эффективности обеспечивать соответствующую гибкость в выборе оборудования, например различных датчиков или исполнительных устройств.
Возможность повторного использования является лишь одним из критериев выбора. Так, совершенно необходимы надёжные механизмы обнаружения, нейтрализации и устранения неисправностей. Здесь важно правильно определить соотношение цена/эффективность, а также оптимально задать глубину и временные параметры процедур обработки ошибок и информирования о них пользователя.
В целом, с точки зрения таких функциональных параметров, как безопасность, качество, надёжность и долговечность новые электронные системы должны, как минимум, не уступать традиционным механическим и по мере возможности превосходить их. То же можно сказать и о цене, которая ни в коем случае не должна увеличиваться, если функциональность систем остаётся прежней. Новые разработки будут востребованы лишь в том случае, если они смогут обеспечить очевидный, с точки зрения пользователей, выигрыш в плане функциональности и/или стоимости.
9.7.2. Возможности технологии x-by-wire
В концептуальном плане, смысл технологии x-by-wire состоит в том, что она разрывает непосредственную связь водителя транспортного средства с приводными механизмами основных управляемых узлов автомобиля. Механические или гидравлические приводы, скажем, дроссельной заслонки или тормозов заменяются полностью электронными системами управления. С точки зрения системной архитектуры технология x-by-wire допускает децентрализацию информации, потребителей тока, датчиков, вычислительных ресурсов и исполнительных устройств. Используется метод передачи информации по распределённым каналам, чтобы обеспечить работу в реальном времени и повысить безопасность системы (за счёт избыточности данных). Потребление тока также децентрализовано, благодаря этому снижаются потери в соединительных линиях и уровень электромагнитных излучений.
Примеры использования технологии x-by-wire
Ниже с целью иллюстрации возможностей и преимуществ технологии x-by-wire приведён ряд примеров её использования в автомобильном оборудовании.

INFSEMI_2-Text.fm, стр. 397 из 589 (September 3, 2010, 17:07)
9.7. Достоинства и проблемы технологий электронного управления оборудованием 397
Классическая конструкция автомобиля основана на механических приводах и тягах. Соответственно, его внешний вид определяется используемым источником энергии, вокруг которого строится всё остальное. Таким образом, двигатель и трансмиссия автомобиля должны рассматриваться как наиболее важные элементы при его проектировании. Колёса и подвеска преобразуют вырабатываемую двигателем энергию в движение по дороге и играют ключевую роль в обеспечении стабильности этого движения и, следовательно, его безопасности (т.е. относятся к узлам, определяющим безопасность и динамику автомобиля). Дополнительные опции и вспомогательные функции, повышающие комфортабельность транспортного средства (например, улучшающие характеристики осветительного оборудования и обзорность), входят в состав кузовного оборудования. К информационно-развлекательной сфере относятся функции, обеспечивающие обмен информацией, коммуникационные и развлекательные услуги.
В области силового оборудования существует тенденция к оптимизации систем управления двигателем и трансмиссией, чтобы, с одной стороны, снизить уровень вредных выбросов, а с другой — обеспечить наиболее комфортный для водителя уровень чувствительности (реакции) этих систем управления. Электронное (by-wire) управление трансмиссией включает в себя
|
|
Электронное |
|
|
|
рулевое |
|
Электронное |
|
управление |
|
управление |
Электронная Электрогидрав- |
||
подвеской |
тормозная |
лическое |
|
(жидкостное) |
|||
Электрические |
система |
||
отказоустойчи- |
|||
амортизаторы |
Электрогидрав- |
||
вое рулевое |
|||
|
|
||
лические |
управление |
|
тормоза (EHB) |
||
|
||
Электромехани- |
|
|
ческие тормоза |
|
|
(EMB) |
|
следующие локальные подсистемы: управление газом, сцеплением и коробкой передач (Рис. 9.55).
Группа электронных систем управления двигателем включает в себя управление положением дроссельной заслонки, электронный впрыск топлива, рециркуляцию отработанных газов и электрический турбокомпрессор. Основное достоинство электронного управления состоит в том, что оно позволяет более точно контролировать состав топлив- но-воздушной смеси, поступающей в цилиндры двигателя. Чтобы снизить процентное содержание CO2 в выхлопных газах, уменьшают объём двигателя, например при использовании систем рециркуляции отработанных газов, при этом динамику можно улучшить путём применения электрического турбокомпрессора или нагнетателя. Кроме того, потери давления во впускных коллекторах могут быть уменьшены, если реализовать адаптивную систему управления клапанами, например, с использованием электромеханических, электрогидравлических или электромагнитных клапанов.
Электронное управление сцеплением реализует ряд функций, относящихся к управлению двигателем: контроль температуры, контроль топливного бака, системы зажигания, последующей обработки выхлопных газов и т.д. Необходимость понизить процентное содержание CO2 в выхлопных газах автомобилей привела к появлению новых концепций, например гибридных приво-
Электронное управление двигателем
Электронное управление положением дроссельной заслонки Впрыск топлива
Рециркуляция отработанных газов (EGR) Электротурбокомпрессор
Электронный силовой модуль
Стартер-генератор Электронное управление зажиганием Топливный бак Температура двигателя
Последующая обработка выхлопных газов
Электронное управление коробкой передач
Электрогидравлическая АКП Электромеханическая АКП Трансмиссии с двойным сцеплением
Рис. 9.55. Области применения электронных систем by-wire, предназначенных для управления трансмиссией и безопасностью/динамикой автомобиля.

INFSEMI_2-Text.fm, стр. 398 из 589 (September 3, 2010, 17:07)
398 9. Полупроводниковые устройства для автомобилей
дов (первое поколение которых представляет собой сочетание двигателя внутреннего сгорания и стартер-генератора). Появление гибридных двигателей открывает возможность реализации таких функций, как кру- из-контроль с опцией Stop&go, рекуперативное торможение и т.п.
Системы электронного управления коробкой передач (shift-by-wire) включают в себя контроллеры автоматических коробок передач различного типа, например, электрогидравлических и электромеханических автоматических многоступенчатых коробок передач, вариаторов (бесступенчатых автоматических коробок передач), трансмиссий с двойным сцеплением и систем полного привода. Использование систем shift-by-wire позволяет точнее выдерживать передаточные отношения, задаваемые контроллером двигателя, благодаря чему снижается содержание CO2 в выхлопных газах, а вождение становится более комфортным
иприятным.
Вобласти систем безопасности и управления динамикой автомобиля акцент в настоящее время также делается на унификацию и организацию совместной работы рулевого управления, тормозной системы и подвески с целью обеспечить максимально возможные стабильность управления автомобилем и контакт с дорогой. Соответственно, основными приложениями технологий by-wire являются контроллеры рулевого управления, тормозов и устройств демпфирования ударов
ивибраций (амортизаторов).
Что касается электрических тормозов, то необходимость их внедрения определяется также многими дополнительными факторами, связанными с повышением уровня безопасности и комфорта, соответствием требованиям защиты окружающей среды и обеспечением приемлемой стоимости. Упомянем лишь некоторые из них: тормозные системы с электрическим приводом позволяют точно регулировать величины тормозных усилий, уменьшить время реакции, осуществлять просушивание мокрых тормозных дисков и контролировать износ тормозных колодок, например, в ходе длительного торможения при спуске. Здесь, как и в других областях применения, технологии электронного управления (x-by-wire) не сразу, но постепенно получают всё более широкое распространение. Путь развития тормозных систем ведёт от традиционных, гидравличес-
ких или механических к электрически регулируемым (посредством систем ABS, ESP, экстренного торможения) устройствам и далее через гибридные схемы к полностью электронным тормозным системам (в которых полностью отсутствуют любые механические узлы между водителем и исполнительными устройствами). Гибриды могут представлять собой как простые схемы с гидравлическими резервными тормозами, так и конструкции, в которых на одной из осей автомобиля размещаются тормоза с электрическим (электромеханическим или электрогидравлическим) приводом.
Система динамической регулировки и контроля уровня жёсткости амортизаторов позволяет адаптировать их характеристики к конкретным условиям вождения. Это, в свою очередь, уменьшает потребление топлива и улучшает контакт с дорогой. В сочетании с правильными настройками тормозной системы и рулевого управления система управления амортизаторами вносит существенный вклад в обеспечение курсовой устойчивости автомобиля.
Рулевое управление представляет собой очень критичный, с точки зрения безопасности, узел автомобиля, для которого трудно реализовать даже механическое резервирование.
Основная задача при проектировании кузовной электроники и средств комфорта (к этой области относятся электронные системы управления кондиционированием воздуха, стеклоочистителями, осветительным оборудованием, дверными модулями и т.д.) состоит в наиболее оптимальной, с точки зрения стоимости, локализации функций (распределения их между контроллерами локальных подсистем). При этом вопросы безопасности или, скажем, массогабаритные характеристики отходят на второй план. Грамотное распределение функций между компонентами системы позволяет уменьшить её стоимость и количество соединительных проводов, обеспечивает возможность наращивания функций (масштабируемость) и минимизирует влияние тех или иных локальных неисправностей (возникших, например, вследствие небольшого ДТП). Так, если в результате столкновения автомобиль получил повреждения (разбита фара), это не должно приводить к выходу из строя всего осветительного оборудования. С другой стороны, нежела-

INFSEMI_2-Text.fm, стр. 399 из 589 (September 3, 2010, 17:07)
9.7. Достоинства и проблемы технологий электронного управления оборудованием 399
тельно, к примеру, размещать электронный модуль управления передними фарами в модуле управления задними фарами, поскольку это может поднять затраты на ремонт на заоблачную высоту, а в месте с ними возрастёт и величина страховой премии.
Примером удачного применения технологии by-wire может служить электронномеханическое управление заслонками кондиционера, осуществляемое с использованием простых шинных протоколов. Такое решение позволяет обеспечить масштабируемость и гибкость в реализации, а также минимизировать расходы на соединительные провода. Аналогично, если заменить механический синхронизатор работы стеклоочистителей лобового стекла на электронный коммутатор, то это расширит возможности по внешнему дизайну автомобиля.
9.7.3.Полупроводниковые решения для систем x-by-wire
Шлюзовые и магистральные сетевые архитектуры
В настоящее время в большинстве автомобилей для связи между различными локальными подсистемами и модулями используется сетевая структура с центральным шлюзом. Шлюзы обеспечивают обмен информацией между отдельными участниками сети и поддерживают функции фильтрации, преобразования протоколов и инкапсуляции (формирования пакетов) данных. Центральный шлюз, по сути, выполняет необходимую, хотя и не дающую явных результатов работу (контроллера сети), однако его стоимость довольно велика. К тому же, если обмен данными осуществляется между несколькими локальными устройствами, то использование центрального шлюза затрудняет сетевое планирование и ухудшает так называемую прозрачность сети. Ещё б=ольшие проблемы могут возникнуть в том случае, когда необходимо расширить уже существующую сеть. Информация о тех или иных локальных изменениях, распространяясь по всей сети, довольно часто может быть с трудом идентифицирована лишь после того, как эти изменения уже произошли, что во многих случаях требует дорогостоящей процедуры перенастройки системы в целом. С другой стороны, существует и альтернативная, магистральная (шинная) топология, которая,
при наличии определённых предпосылок её применения, обладает весомыми преимуществами. К ним относятся быстрый и безопасный обмен данными с использованием прозрачных и детерминированных протоколов, не зависящих от прикладного программного обеспечения, наличие хорошо проработанных стандартных API (прикладных программных интерфейсов) и прозрачных, ресурсо и аппаратно независимых программных функций. Следствием того, что процессы передачи данных и настройки функционирования сети протекают независимо друг от друга, являются хорошие тестопригодность и модифицируемость системы. Это, в свою очередь, означает дополнительную гибкость в использовании всех доступных ресурсов.
Интеллектуальные дискретные/встроенные источники питания
В зависимости от используемых технологий производства полупроводниковых кристаллов, их функциональных возможностей и типов корпусов, в данной области существует три основных класса решений: монолитные однокристальные устройства, многокристальные ИС и устройства на базе дискретных компонентов.
Интеллектуальные интерфейсы ввода/вывода и вспомогательные ИС
Современные автомобильные системы управления с центральным контроллером требуют применения полупроводниковых компонентов, адаптированных для работы в конкретных приложениях, чтобы таким образом сократить количество этих компонентов и снизить общую стоимость системы. Ключ к дальнейшему снижению стоимости лежит в использовании подходящих стандартных микросхем (ASSP) взамен специализированных микросхем (ASIC), разрабатываемых под конкретное приложение.
Обмен данными между контроллерами
К автомобильным контроллерам предъявляются всё более жёсткие требования с точки зрения быстродействия и рентабельности. По сравнению с заказными (ASIC) стандартные микросхемы (ASSP) являются универсальными, что позволяет организовать массовое производство при более вы-
INFSEMI_2-Text.fm, стр. 400 из 589 (September 3, 2010, 17:07)
400 9. Полупроводниковые устройства для автомобилей
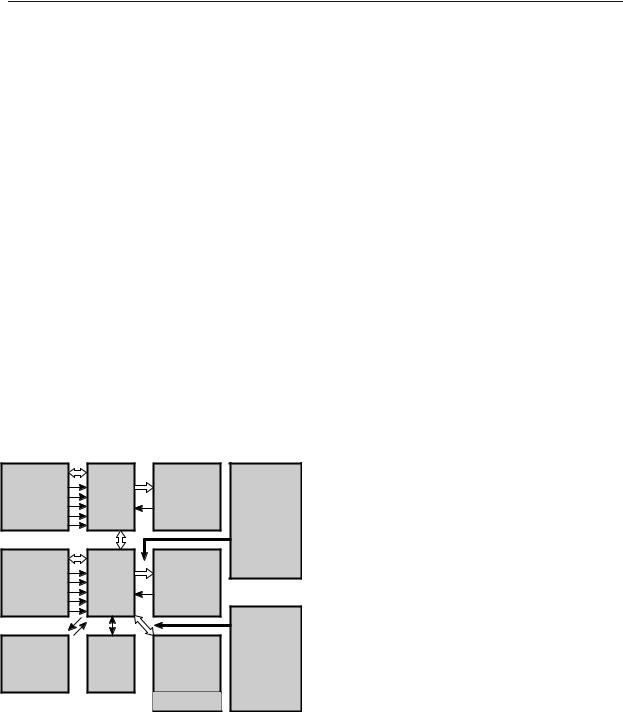
соком качестве и низкой цене компонентов. Однако необходимой предпосылкой успешной работы контроллеров ASSP является организация каналов доступа ко всем компонентам системы. Один из наиболее распространённых на сегодняшний день интерфейсов, последовательный периферийный интерфейс (SPI), обеспечивает скорость передачи данных не более 5 Мбит/с, в то время как уже в ближайшем будущем потребуются каналы передачи данных со скоростью до 30 Мбит/с. Новое решение от компании Infineon обеспечивает связь процессоров или модулей памяти через высокоскоростной последовательный интерфейс. При его использовании совместно с контроллером трансмиссии, построенным на процессорном ядре TriCore (Рис. 9.56), можно повысить рентабельность многопроцессорной системы за счёт оптимального распределения ресурсов; при этом обмен ресурсами и связь различных модулей друг с другом осуществляется через высокоскоростной последовательный интерфейс Micro Link (MLI).
Аналоговый |
Микро- |
Интеллекту- |
Последо- |
|
альные |
вательный |
|||
входной |
кон- |
силовые ИС |
интерфейс |
|
каскад |
троллер |
нового |
μSB (Micro |
|
|
1 |
поколения |
Second |
|
|
|
|
Bus) |
|
|
|
|
30 Мбит/с, |
|
|
|
Интеллекту- |
асимме- |
|
Аналоговый |
Микро- |
тричный |
||
альные |
||||
входной |
кон- |
силовые ИС |
|
|
каскад |
троллер |
нового |
|
|
|
2 |
поколения |
Последо- |
|
|
|
|
||
|
|
|
вательный |
|
|
Источ- |
Модуль |
интерфейс |
|
Транси- |
MLI (Micro |
|||
управления |
||||
ник |
||||
веры |
удалённым |
Link) |
||
питания |
||||
|
доступом |
30 Мбит/с, |
||
|
|
дуплекс- |
||
|
|
|
||
|
|
Трансиверы |
ный |
|
|
|
|
Рис. 9.56. Обмен данными внутри многопроцессорной системы.
Обмен данными внутри кристалла
Необходимым условием создания хорошо организованной системы с распределением ресурсов является наличие понятных интерфейсов и разделение потоков данных от потока команд управления. В связи с этим компания Infineon в своих новых 32-битных микроконтроллерах применяет иерархическую системную архитектуру, предусматривающую раздельное управле-
ние обработкой прикладных программ, статусными/сетевыми и периферийными функциями. Обработка прикладного программного обеспечения осуществляется 32-битным RISС DSP процессором на ядре TriCore. Типовые задачи сетевого администрирования, выполнения статусных и диагностических функций или обмена с периферийными устройствами могут (опционально) решаться с использованием прямого доступа к памяти (DMA) или за счёт применения вспомогательного 32-битного периферийного процессора (PCP). Микроконтроллеры семейства AUDO-NG, в свою очередь, характеризуются масштабируемостью ресурсов: в зависимости от объёма подлежащих обработке данных могут использоваться аппаратные ресурсы различных уровней, как DMA, так и PCP, а также соответствующие шинные интерфейсы. Это позволяет микроконтроллерам AUDO-NG, помимо управления работой периферийных модулей, выполнять от одного до трёх процессов обработки данных одновременно. Кроме того, их возможности расширяет поддержка большого количества встроенных коммуникационных интерфейсов, таких как SPI, K-Line (ISO9141), LIN, CAN, TTCAN, MLI, MSC. Следует отметить и наличие быстродействующих аналого-цифро- вых преобразователей (АЦП) и программируемых таймеров.
9.8.Перспективы развития автомобильной электроники
Несмотря на колоссальную сложность задач, стоящих перед разработчиками автомобильной электроники, развитие в этой области идёт бурными темпами. Причинами тому, во-первых, огромный объём рынка (ежегодно в мире производится 55 миллионов новых автомобилей), а во-вторых, относительно постоянный и не подверженный кризисам рост этого рынка.
Несомненно, электрификация и электронизация автомобилей будет продолжена. Во главу угла должна быть поставлена задача разработки оптимальной концепции, сочетающей использование в автомобилях центрального и локального аппаратного и программного обеспечения и обеспечивающей бесперебойное взаимодействие всех его компонентов. Без наличия такой концепции добиться существенных улучшений в функци-

INFSEMI_2-Text.fm, стр. 401 из 589 (September 3, 2010, 17:07)
9.8. Перспективы развития автомобильной электроники 401
ональных возможностях автомобиля и снизить его цену будет очень сложно.
Ключом к успеху здесь может служить дальнейшая стандартизация. В первую очередь, использование стандартизированных или универсальных программных и аппаратных средств будет востребовано при реализации таких традиционных приложений, как, например, дверные модули или подушки безопасности. Очевидно, что эта тенденция будет только усиливаться и развиваться; объёмы выпуска продукции будут расти, в то время как её разнообразие существенно сократится.
Тенденция к унификации или стандартизации аппаратных средств изменила направление развития полупроводниковых компонентов: от стандартных и заказных микросхем (ASIC) к компонентам ASSP, специально адаптированным под конкретные приложения. В связи с этим, в будущем большое значение при разработке подобных компонентов приобретёт компьютерное моделирование, призванное ускорить процесс разработки и повысить её качество.
Автомобильная промышленность не стоит на месте. Так, большие средства были вложены в разработку альтернативных концепций транспортных средств, таких как электромобили (использующие энергию аккумуляторных батарей), гибридные
конструкции (приводимые в движение обычным двигателем внутреннего сгорания и/или электромотором) или автомобили на топливных элементах (использующие электрическую энергию, вырабатываемую водородным или спиртовым топливным элементом). Уже сегодня эти проекты демонстрируют большой потенциал. Однако появление альтернативных двигательных установок не слишком сильно повлияло на задачи автомобильной электроники. Такие её приложения, как системы безопасности, кузовные или информационно-развлека- тельные системы вообще не претерпели изменений, и лишь в области управления трансмиссией автомобиля некоторые изменения всё же имели место.
Несмотря на развитие автомобильной электроники, ещё немало конкретных проблем ожидают своего разрешения. Например, быстрая смена полупроводниковых технологий ведёт к тому, что очень скоро будет невозможно найти замену неисправному компоненту и окажется очень сложно адаптировать новые полупроводниковые устройства в уже имеющиеся приложения. Существует, впрочем, вполне прагматичное решение этой проблемы — можно использовать контроллеры и модули управления от старых и неисправных автомашин.