

ГЛАВА 2 Кинематика вращательного движения
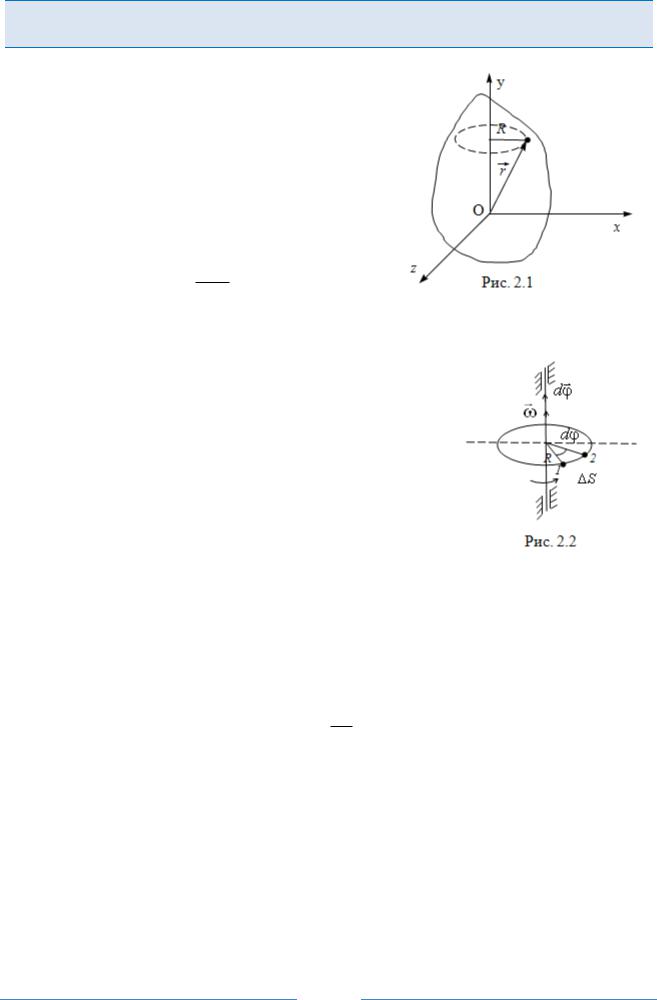
Рассмотрим твердое тело, которое вращается вокруг неподвижной оси (рис. 2.1). Все точки тела при вращении описывают окружности разных радиусов R, центры которых лежат на оси вращения. За время одного полного оборота T любая точка проходит путь равный 2πR. Следовательно, различные точки тела за время одного оборота проходят разные пути и двигаются с разными линейными скоростями:
V = 2TπR .
Введем характеристики, описывающие вращательное движение твердого тела как единого целого: вектор углового элементарного перемещения ϕ, уг-
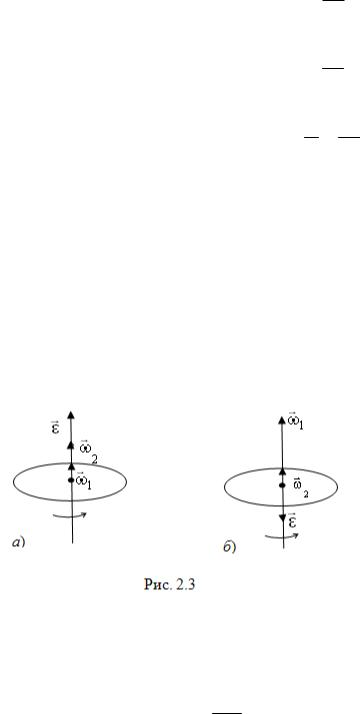
ловую скорость ωr , угловое ускорение ε. Пусть некоторая точка движется по окружности радиуса R (рис. 2.2). Ее положение через промежуток времени ∆t зададим углом ∆ϕ. Элементарные (бесконечно малые) углы поворота рассматривают как векторы. Модуль вектора dϕ равен углу поворота, а его направление сов-
падает с направлением поступательного движения острия винта, головка которого вращается в направлении движения точки по окружности, т.е. подчиняется правилу правого винта.
2.1. Угловая скорость
Угловой скоростью ωr называется векторная величина, численно равная первой производнойr угла поворота по времени, совпадающая с направлением вектора dϕ:
ωr = ddtϕ .
Единицей измерения угловой скорости в системе СИ является радиан в
секунду |
рад |
. Модуль угловой скорости ω= |
dϕ |
. |
|
|
|
||||
с |
|
|
dt |
||
Вращение с постоянной угловой скоростью (ω= const) называется рав- |
|||||
номерным, тогда |
ϕ, |
||||
|
|
ω= |
|||
|
|
|
t |
||
где ∆ϕ − угол поворота за время ∆t.
9
Равномерное вращение можно характеризовать периодом обращения T, под которым понимают время, за которое тело делает один оборот, т.е. поворачивается на угол 2π. В этом случае
ω= 2Tπ,
отсюда
T = 2ωπ .
Число оборотов в единицу времени ν равно
ν = T1 = 2ωπ .
Следовательно,
ω = 2πν.
Угол поворота
ϕ = 2πN ,
где N − число оборотов твердого тела.
2.2. Угловое ускорение
Вектор ωr может изменяться с течением времени как за счет изменения величины скорости вращения тела вокруг оси, так и за счет изменения направления вращения. Угловым ускорением ε называется векторная величина, равная первой производной вектора
угловой скорости по времени:
|
|
|
|
|
εr = lim |
ω = |
dω |
. |
|
|
|
|
|
|
dt |
|
|||
|
|
|
|
|
t→0 |
t |
|
|
|
|
|
|
|
При вращении тела вокруг непод- |
|||||
|
|
|
|
вижной оси вектор углового уско- |
|||||
|
|
|
|
рения направлен вдоль оси враще- |
|||||
|
|
|
|
ния в сторону вектора элементар- |
|||||
|
|
|
|
ного приращения угловой скорости |
|||||
r |
r |
|
|
ω. |
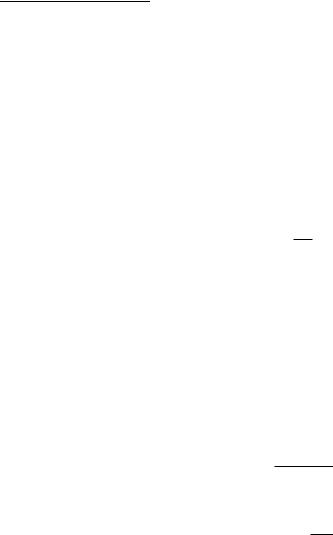
При ускоренном |
движении |
|||
|
ε |
сонаправлен с вектором |
r |
при замедленном |
|||||
ω↑↑ ω и вектор |
r |
ω ( ω↑↑ ε), |
|||||||
|
r |
|
и вектор ε направлен |
противоположно |
r |
r |
r |
||
движении ω↑↓ ω |
ω |
( ω↑↓ ε ) |
|||||||
(рис.2.3). Единицей измерения углового ускорения в системе СИ является радиан на секунду в квадрате радc2 .
Равнопеременное вращение можно описать системой уравнений:
ε = const, |
|
|
|||||
r r |
|
r |
|
|
|||
ω= ω0 |
+ εt, |
εrt2 |
|
||||
ϕ = ϕ |
0 |
+ω t + |
. |
||||
|
|||||||
|
|
0 |
|
2 |
|
||
|
|
|
|
|
|
||
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
||
где ω0 = ω(t = 0) - начальная угловая скорость; ϕ0 = ϕ(t = 0) - начальный угол поворота.
2.3. Связь линейных и угловых характеристик
Установим связь между модулями линейной и угловой скоростей:
|
V = lim |
S = lim R |
|
ϕ = R lim |
ϕ |
= R dϕ = Rω. |
|||||||||
Таким образом, |
t→0 |
t |
|
t→0 |
|
t |
t→0 |
t |
|
|
dt |
||||
|
|
|
|
|
V = ωR . |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В векторной форме это соотношение записывается в виде векторного |
|||||||||||||||
произведения Vr |
= [ωr ], где r |
− радиус-вектор, проведенный из лежащей на оси |
|||||||||||||
вращения точки О начала координат (рис.2.4). |
|
|
|
|
|
|
|
||||||||
|
|
Модуль нормального ускорения точки вращающего- |
|||||||||||||
|
|
ся тела равен |
|
|
|
|
V 2 |
|
|
|
|||||
|
|
|
|
|
|
|
|
an = |
= ω2 R , |
||||||
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
R |
|||
|
|
где R − расстояние от рассматриваемой точки до оси |
|||||||||||||
|
|
вращения. |
|
|
|
|
|
|
dV |
|
|||||
|
|
Модуль тангенциального ускорения равен aτ= |
, |
||||||||||||
|
|
|
|||||||||||||
|
|
тогда |
|
|
|
|
|
|
|
|
dt |
||||
|
|
|
d(ωR) |
|
dω |
|
|
|
|
|
|
||||
|
|
aτ |
= |
V |
= |
= R |
|
= Rε, |
|||||||
|
|
|
dt |
dt |
|||||||||||
|
|
|
|
t |
|
|
|
|
|
|
|
||||
где ε − модуль углового ускорения. В результате aτ = εR .
Таким образом, линейная скорость V , нормальное an и тангенциальное arτ ускорения растут линейно с увеличением расстояния от точки до оси враще-
ния, а все вращательные характеристики: угол поворота |
ϕ, угловая скорость |
|
r |
r |
|
ω, угловое ускорение ε одинаковы для всех точек твердого тела. |
||
|
2.4. Примеры решения задач |
|
1. |
Уравнение движения материальной точки по |
прямой имеет вид |
x = A + Bt +Ct3 , где A = 4м, B = 2м/с, C = 0,2м/с3. Найти: 1) положение точки в моменты времени t1 = 2с, t2 = 5с; 2) среднюю путевую скорость Vср за время, протекшее между этими моментами; 3) мгновенные скорости V1 и V2 в указанные моменты времени;4) среднее ускорение aср за указанный промежуток времени; 5) мгновенные ускорения a1 и a2 в указанные моменты времени.
11
Дано
A = 4м, B = 2м/с; C = 0,2м/с3;
t1= 2с, t2= 5с.
x = A + Bt +Ct3
1)x1 = ?, x2 = ?
2)Vср = ?
3)V1 = ?, V2 = ?
4)aср =?
5)a1 =?; a2 =?
Решение:
Положение точки в заданные моменты времени найдем, подставив в уравнения движения числовые значения коэффициентов A, B, C и моментов времени t1 и t2:
x(t 1) = 4 + 2 2 +0,2 23 = 9,6 (м),
x(t2 ) = 4 + 2 5 +0,2 53 = 39 (м).
Средняя путевая скорость определяется как путь, пройденный точкой деленный на время ее движения:
V = S |
= |
x2 |
− x1 |
, |
|
|
|
||||
ср |
t |
|
t2 |
−t1 |
|
|
|
||||
V = |
39 −9,6 |
= 9,8 (м/с). |
|
|
|||
ср |
5 |
−2 |
|
|
|
||
Мгновенная скорость относительно оси x есть первая производная от координаты по времени:
Vx = dxdt = B +3Ct2 .
Подставив числовые значения коэффициентов B, C и моментов времени t1 и t2, получим
V1 = V(t1) = 2+3·0,2·22 = 4,4(м/с),
V2 = V(t2) = 2+3·0,2·52 = 17(м/с).
Среднее ускорение определяется как отношение изменения скорости к промежутку времени, за который это изменение произошло
aср = |
V |
= |
V2 −V1 |
, |
t |
|
|||
|
|
t2 −t1 |
||
aср = 175−−42,4 = 4,2 (м/с2).
Ускорение точки найдем как первую производную скорости по времени:
ax = ddVt = 6Ct .
В заданные моменты времени
a1 = 6·0,2·2= 2,4(м/с2), a2 = 6·0,2·5= 6(м/с2).
2. Точка движется по кривой с постоянным тангенциальным ускорением a τ = 0,5м/с2. Определить полное ускорение точки на участке кривой с радиусом
кривизны R = 3м, если точка движется на этом участке со скоростью V = 2м/с.
Дано |
|
Решение: |
|
aτ = 0,5м/с2; |
Полное ускорение a точки, движущейся по кривой, может |
||
R = 3м |
быть найдено как геометрическая сумма тангенциального |
||
V = 2м/с. |
ускорения a τ , направленного по касательной к траекто- |
||
a =? |
рии, и нормальногоan , направленного к центру кривизны |
||
|
траектории (рис. 2.5) |
||
|
|
12 |
|
|
|
|
|