Теория механизмов и машин
.docФедеральное государственное бюджетное учреждение высшего профессионального образования
Нижегородский Государственный Технический Университет
им. Р.Е. Алексеева
Кафедра «Теоретическая и прикладная механика»
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
К курсовой работе по дисциплине
«Техническая механика»
по теме «Кривошипно-шатунный механизм»
Выполнил студент группы А11-СПв:
П. В. Волков
Подпись Bolkoff
Дата 10.05.2013.
Проверил:
Н. В. Ершов
Оценка__________
Подпись________
Дата___________
Нижний Новгород
2013 год
ЗАДАНИЕ
На курсовую работу по дисциплине «Теория механизмов и машин» по теме «Кривошипно-шатунный механизм»
курсовая работа должна включать пояснительную записку, оформленную на листах формата А4 и графический материал, оформленный на листах формата А1.
Структура пояснительной записки.
-Титульный лист.
- Задание на курсовую работу.
- Содержание.
- Анализ кривошипно-шатунного механизма.
Указания к разделу. Построить план положений. Определить кинематические характеристики механизма (скорости и ускорения кинематических пар механизма, угловые скорости и угловые ускорения звеньев механизмов), построить планы скоростей и ускорений. Определить реакции в кинематических парах механизма, построить планы сил, определить уравновешивающий момент.
- Список литературы.
Структура графического материала:
- Лист (формат А1) «Анализ кривошипно-шатунного механизма».
Указание. На листе должны быть представлены: план двенадцати положений кривошипно-шатунного механизма; план скоростей и план ускорений; силовой анализ и планы сил.
Таблица 1. Исходные данные для анализа кривошипно-шатунного механизма
|
φ1, рад |
⍵1, рад/с |
OA, м |
AB, м |
m1, кг |
m2, кг |
m3, кг |
F, Н |
|
2π/3 |
-1 |
1,2 |
3,6 |
1 |
3 |
2 |
8 |
φ1 – угол поворота кривошипа;
⍵1 – угловая скорость кривошипа;
OA – длина кривошипа;
AB – длина шатуна;
m1, m2, m3 – массы кривошипа, шатуна и ползуна соответственно;
F – сила, действующая на ползун.
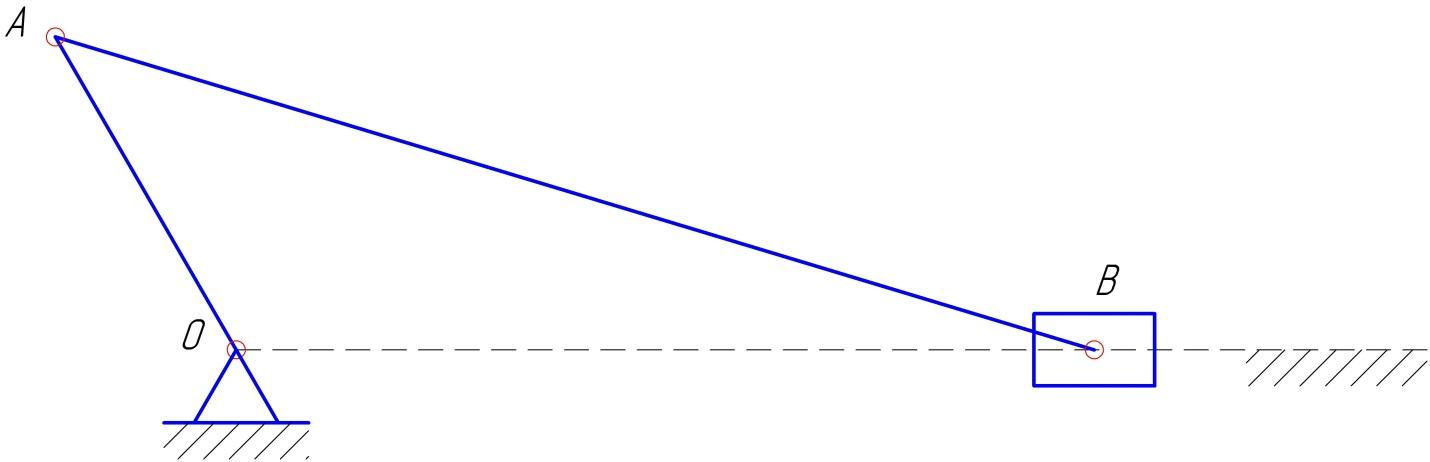
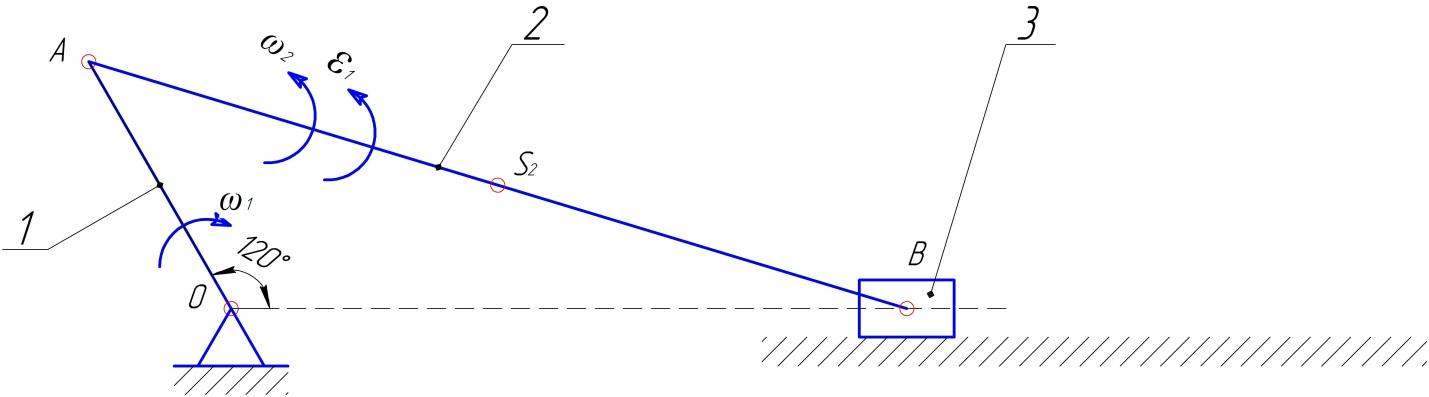
Схема кривошипно-шатунного механизма
Задание принял студент группы А11-СПв
П. В. Волков
Подпись Bolkoff
Дата ________
Преподаватель
Н. В. Ершов
Подпись________
Дата ________
СОДЕРЖАНИЕ
1. Анализ кривошипно-шатунного механизма۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰5
1.1. Кинематический анализ۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰5
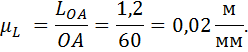
1.1.1. Масштаб длин частей механизма۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰5
1.1.2. Длины частей механизма۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰5
1.1.3. Определение скоростей۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰5
1.1.4. Масштаб скоростей۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰6
1.1.5. Треугольник скоростей۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰6
1.1.6. Величина линейных скоростей и угловые скорости ۰۰۰۰۰۰۰۰۰۰۰۰۰6
1.1.7. Определение ускорений۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰7
1.1.8. Масштаб ускорений۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰7
1.1.9. Определение оставшихся ускорений۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰7
1.1.10. Треугольник ускорений۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰8
1.2. Силовой анализ۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰8
1.2.1. Сила тяжести звена۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰8
1.2.2. Сила инерции звена۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰8
1.2.3. Осевой момент инерции звена۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰9
1.2.4. Угловое ускорение звена۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰9
1.2.5. Момент пар сил инерции۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰9
1.2.6. Силовая схема 1۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰9
1.2.7. Силовой расчёт структурной группы ۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰10
1.2.8. Определение реакции۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰10
1.2.9. Уравнение равновесия сил действующих на механизм۰۰۰۰۰۰۰۰۰۰11
1.2.10. Построение векторов сил и определение реакций۰۰۰۰۰۰۰۰۰۰۰۰۰۰11
1.3. Определение уравновешивающего момента۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰12
1.3.1. Уравновешивающий момент для ведущего звена۰۰۰۰۰۰۰۰۰۰۰۰۰۰۰12
Приложение к работе:
«Анализ кривошипно-шатунного механизма» Лист А4.
1. Анализ кривошипно-шатунного механизма
1.1. Кинематический анализ
1.1.1. Масштаб длин частей механизма
1.1.2. Длины частей механизма
![]()
1.1.3. Определение скоростей
Проанализируем схему кривошипно-ползунного механизма: точка О является неподвижной точкой, следовательно, модуль скорости этой точки равен нулю
![]()
Вектор скорости точки А представляет собой геометрическую сумму вектора скорости точки О и скорости относительного вращательного движения точки А вокруг точки О:
![]()
Линия
действия вектора скорости ![]() является перпендикуляром к оси кривошипа
1, а направление действия этого вектора
совпадает с направлением вращения
кривошипа.
является перпендикуляром к оси кривошипа
1, а направление действия этого вектора
совпадает с направлением вращения
кривошипа.
Модуль скорости точки А:
![]()
1.1.4. Масштаб скоростей
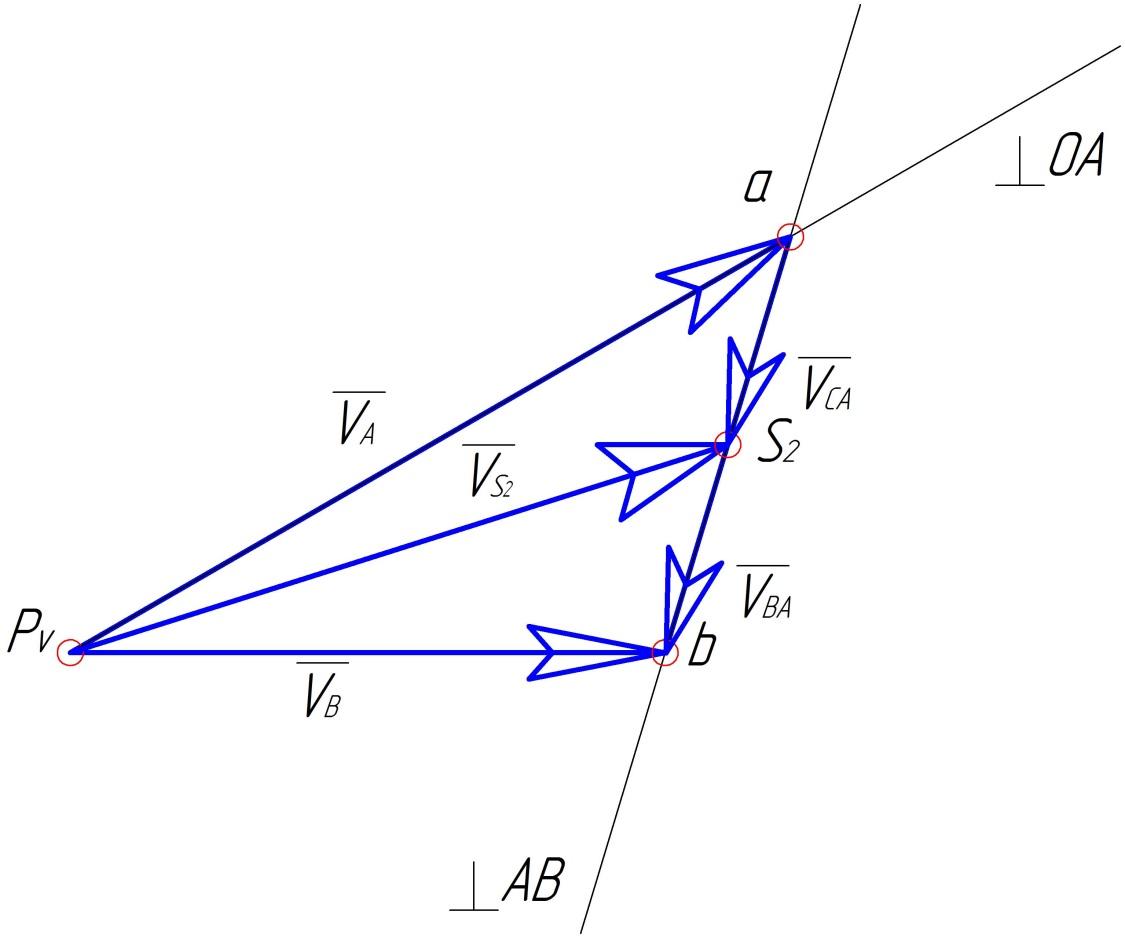
1.1.5. Треугольник скоростей
1.1.6. Величина линейных скоростей и угловые скорости
![]()
![]()
![]()
![]()
![]()
Направление
вектора угловой скорости шатуна
определяется следующим образом. Вектор
скорости ![]() условно переносится в точку В плана
механизма. Куда он будет вращать шатун
относительно точки А, в ту сторону и
направлена угловая скорость
условно переносится в точку В плана
механизма. Куда он будет вращать шатун
относительно точки А, в ту сторону и
направлена угловая скорость ![]() .
.
1.1.7. Определение ускорений
(۰) а полюс
![]()
![]()
![]()
Так
как точка O
неподвижна и ускорение её равно нулю
![]()
при
![]() ,
то:
,
то:
![]()

![]()
1.1.8. Масштаб ускорений
1.1.9. Определение оставшихся ускорений
![]()
![]()


![]()
![]()

1.1.10. Треугольник ускорений
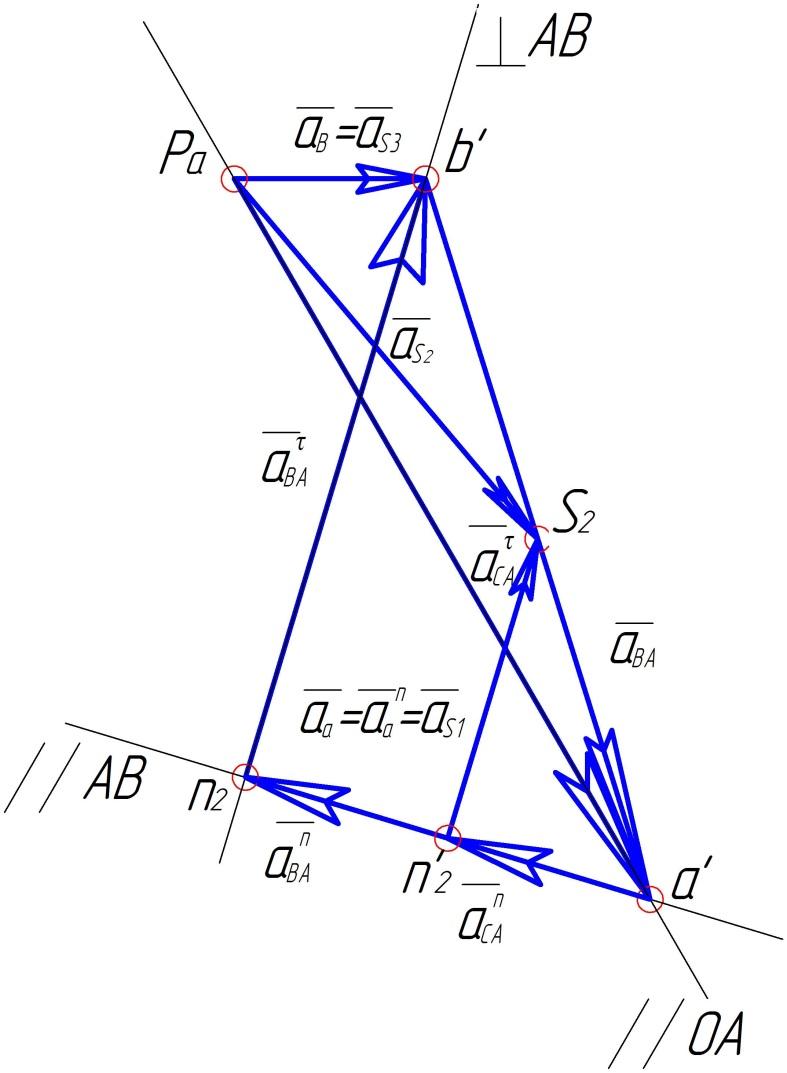
1.2. Силовой анализ
1.2.1. Сила тяжести звена
![]()
![]()
![]()
1.2.2. Сила инерции звена
![]()
![]()
![]()
1.2.3. Осевой момент инерции звена


1.2.4. Угловое ускорение звена
![]()
1.2.5. Момент пар сил инерции
![]()

1.2.6. Силовая схема 1
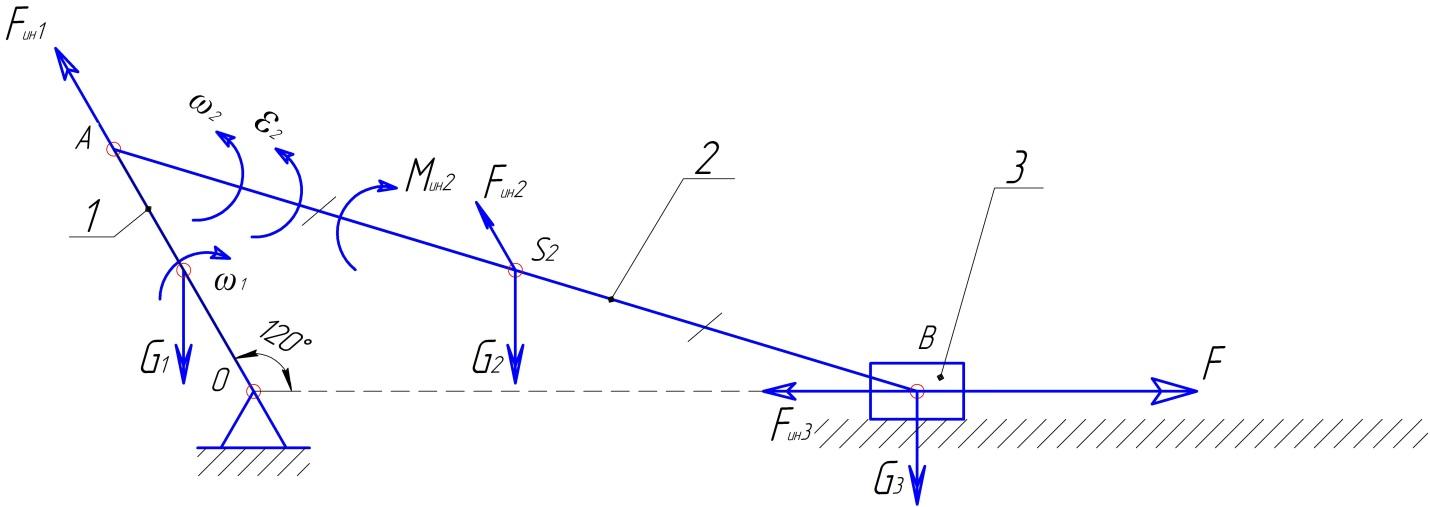
Для удобства дальнейшего расчёта силу и момент сил инерции заменим одной силой, которая будет смещена относительно центра масс звена:
т.к. ползун перемещается только горизонтально, и G3 будет компенсироваться её реакцией, то в расчёт их брать не буду.
1.2.7. Силовой расчёт структурной группы
Показываю все внешние силы, силы инерции, а действие отброшенных частей звена OA и опоры B заменяю реакциями. Эти реакции во вращательной паре неизвестны, поэтому показываем их в виде геометрической суммы нормальной, направленной вдоль звена и тангенциальной, направленной перпендикулярно звену, составляющих.
Если направление реакций выбрано неверно, то в результате расчёта получим отрицательное значение.
1.2.8. Определение реакции
Звено 2


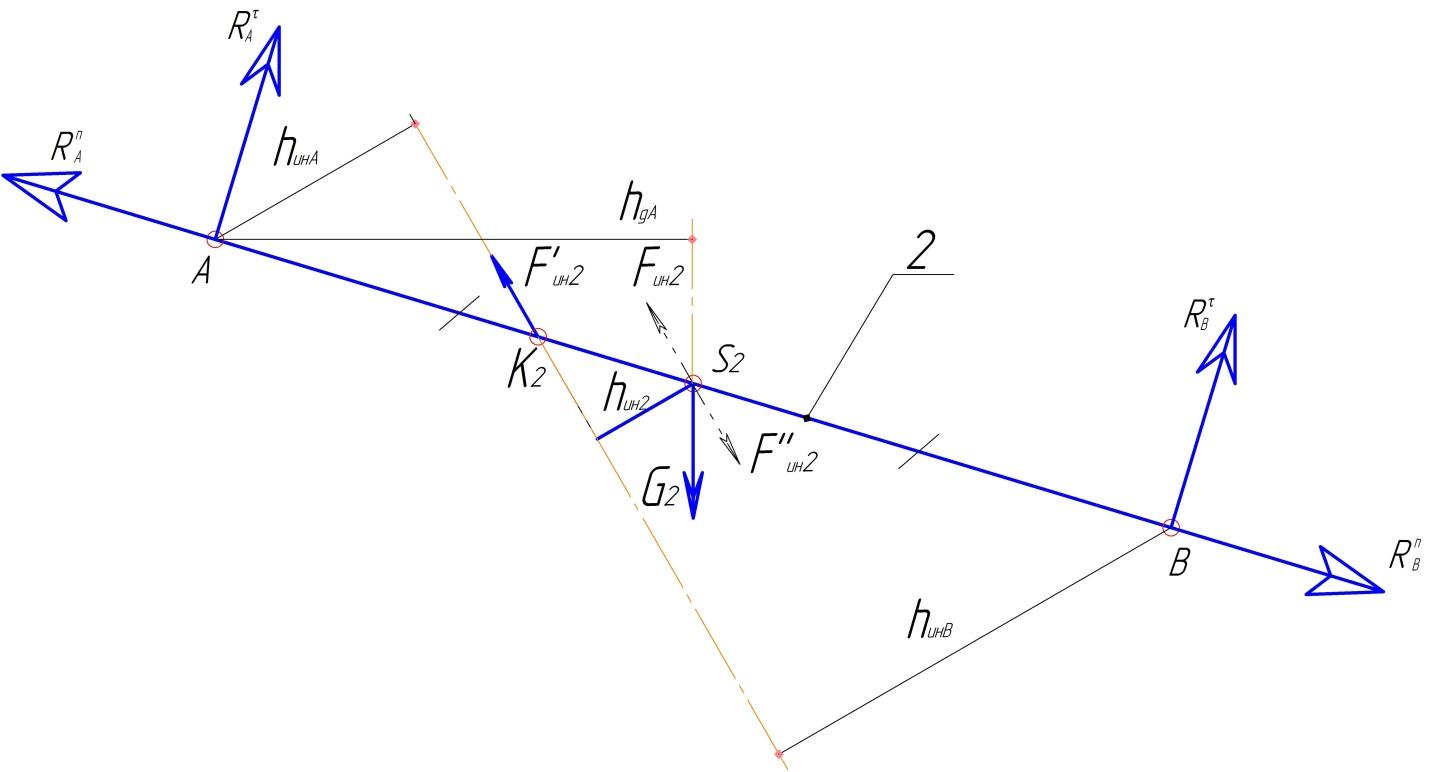
![]()
![]()
![]()


Звено 1
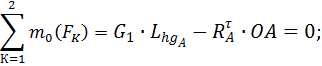

![]()


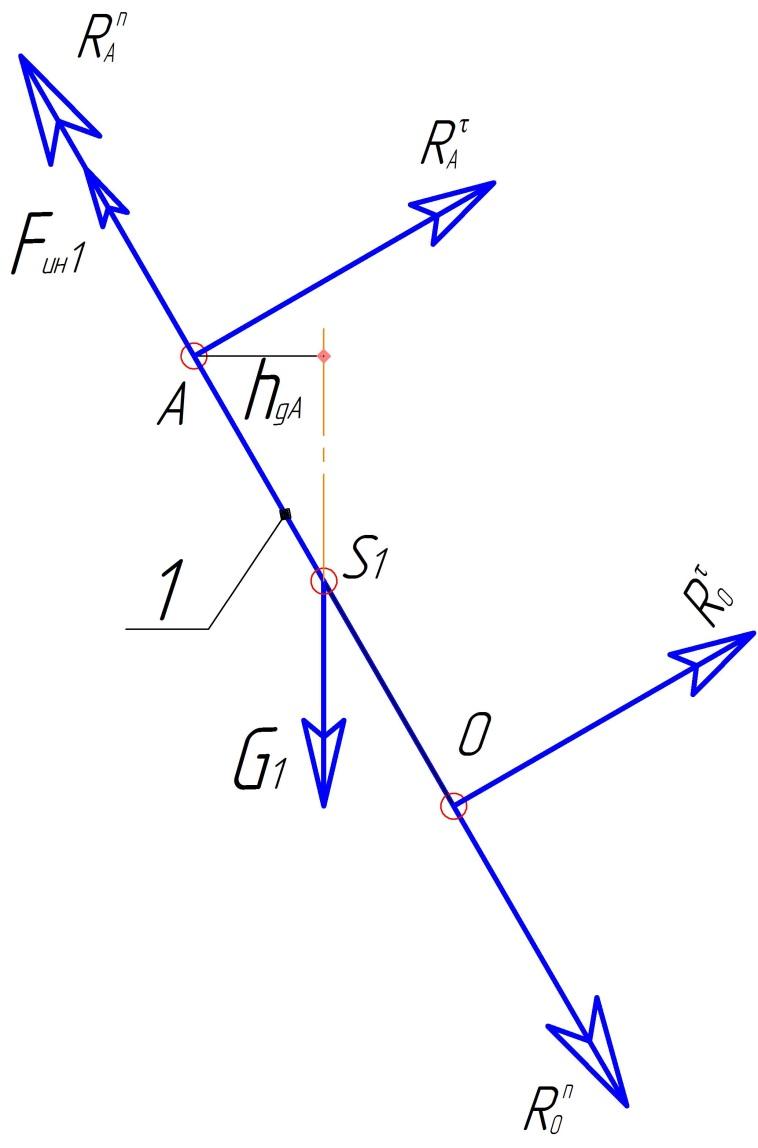
Звено 3




1.2.9. Уравнение равновесия сил
действующих на звено 1
![]()
действующих на звено 2
![]()
действующих на звено 3
![]()
1.2.10. Построение векторов сил и определение реакций
Звено 1
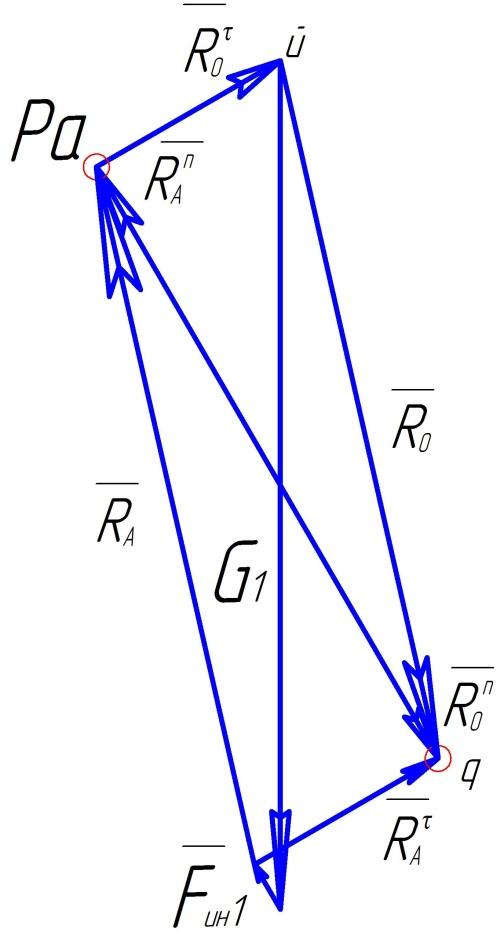
![]()
![]()
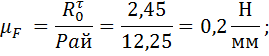
Звено 2
![]()
![]()
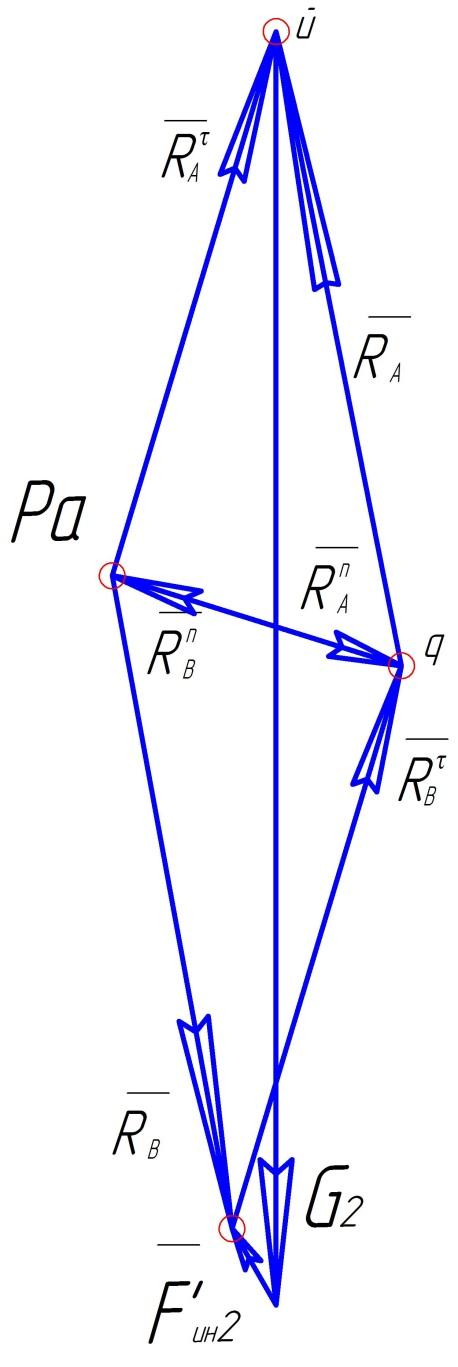
Звено 3
![]()
Графические и расчётные данные совпадают, значит всё выполнено верно.
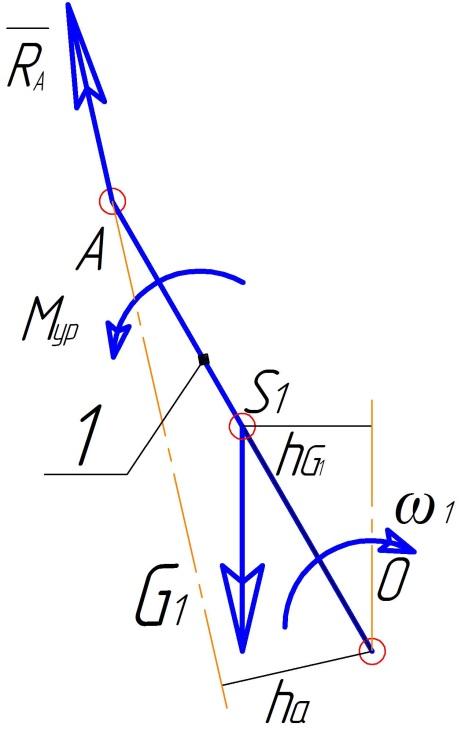
1.3. Определение уравновешивающего момента
1.3.1. Уравновешивающий момент для ведущего звена
![]()
![]()