

Конспект ТАУ / Лекция 17
.docЛекция 17. Расчет установившейся ошибки в системах управления. Структурные признаки астатизма. Коэффициенты ошибок
Установившейся
(статической) ошибкой называют постоянное
значение сигнала ошибки x(t)=g(t)-y(t),
которое она приобретает по окончании
переходного процесса:
![]() ,
рисунок 116.
,
рисунок 116.

Очевидно, установившаяся ошибка зависит от законов изменения и численных характеристик входных сигналов системы. Поэтому при ее определении принято рассматривать так называемые типовые входные сигналы, законы изменения которых составляют степенной ряд относительно времени. Например, для задающего воздействия:
![]() ,
,
![]() ,
,
![]() и так далее.
и так далее.
При наличии нескольких воздействий на линейную систему для определения xуст используется принцип суперпозиции – реакция линейной системы на совокупность входных сигналов совпадает с алгебраической суммой ее реакций на каждый из сигналов в отдельности:
![]() ,
,
где каждое слагаемое,
или составляющая сигнала ошибки,
![]() определяется
для i-го
входного сигнала при условии, что
остальные тождественно равны нулю.
Такой подход полностью соответствует
определению передаточной функции и
позволяет выполнять расчет установившейся
ошибки на основе структурной схемы
системы.
определяется
для i-го
входного сигнала при условии, что
остальные тождественно равны нулю.
Такой подход полностью соответствует
определению передаточной функции и
позволяет выполнять расчет установившейся
ошибки на основе структурной схемы
системы.
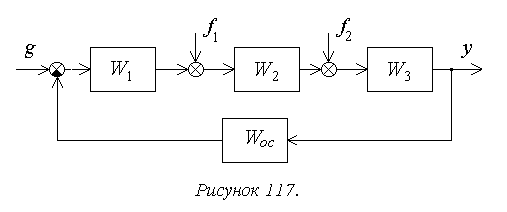
Рассмотрим порядок расчета установившейся ошибки на следующем достаточно общем примере (рисунок 117).
В соответствии с
принципом суперпозиции установившаяся
ошибка будет определяться здесь в виде
суммы трех составляющих
![]() .
.
Изображение по
Лапласу ошибки от задающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке
![]() при известном изображении задающего
воздействия G(s):
при известном изображении задающего
воздействия G(s):
![]() ,
,
где (s) – основная передаточная функция замкнутой системы. Для структурной схемы на рисунке 117
![]() ,
,
где
![]() - передаточная функция разомкнутой
системы, или прямой цепи системы, для
рассматриваемого примера.
- передаточная функция разомкнутой
системы, или прямой цепи системы, для
рассматриваемого примера.
Непосредственно для расчета установившегося значения ошибки от задающего воздействия используют теорему о конечном значении для преобразования Лапласа:
![]()
В результате:
![]() .
.
Изображение по
Лапласу ошибки от возмущающего воздействия
получают через передаточную функцию
замкнутой системы по ошибке от возмущения
![]() при известном изображении возмущающего
воздействия F(s):
при известном изображении возмущающего
воздействия F(s):
![]() ,
,
где f(s) –передаточная функция замкнутой системы по возмущающему воздействию,
![]() ;
;
Wf(s) – передаточная функция разомкнутой системы по возмущению (передаточная функция участка прямой цепи системы от точки приложения возмущающего воздействия до выхода системы).
Для структурной схемы на рисунке 8 необходимо учитывать два возмущающих воздействия, приложенные в различные точки системы.
Для f1:
![]() ,
,
![]() ,
,
 .
.
Для f2:
![]() ,
,
![]() ,
,
 .
.
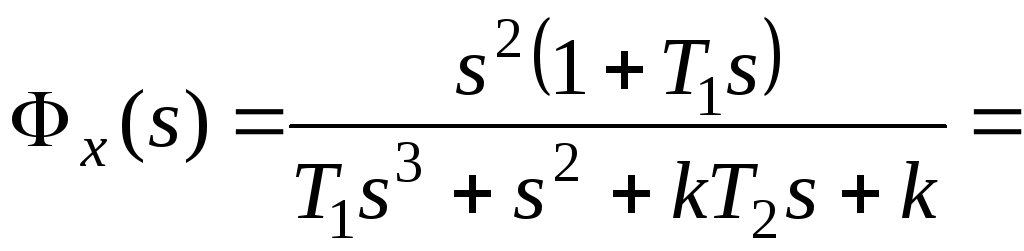
Расчет упрощается для системы с единичной отрицательной обратной связью (рисунок 118):

 ,
,
 ,
,
где k=k1k2k3 – коэффициент передачи разомкнутой системы.
Найдем установившуюся ошибку для некоторых типовых вариантов задающего воздействия.
При
![]() получим:
получим:
![]()
 .
.
При
![]() получим:
получим:
 .
.
При
![]() получим:
получим:
 .
.
Если установившаяся ошибка тождественно равна нулю при каком-либо типовом варианте входного сигнала, независимо от его численных характеристик, систему называют астатической по рассматриваемому входному сигналу.
Количество типовых вариантов входного сигнала – членов степенного ряда, при которых установившаяся ошибка тождественно равна нулю, определяет порядок астатизма.
Рассматриваемая система обладает свойством астатизма второго порядка по задающему воздействию.
Рассмотрим установившуюся ошибку от возмущения f1:
![]() ,
,
 ,
,
где
![]() – коэффициент передачи разомкнутой
системы по возмущению f1.
– коэффициент передачи разомкнутой
системы по возмущению f1.
При
![]() получим:
получим:
![]()
 .
.
При
![]() получим:
получим:
 .
.
При
![]() получим тот же результат.
получим тот же результат.
Отметим, что по возмущению f1 рассматриваемая система не является астатической. Кроме того, она не в состоянии отработать два последних варианта входного сигнала.
Рассмотрим установившуюся ошибку от возмущения f2:
![]() ,
,
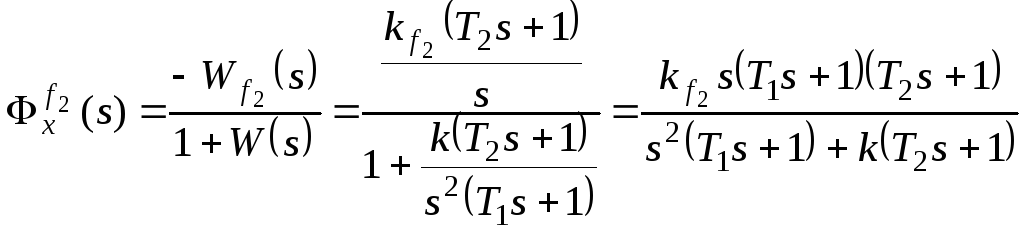 ,
,
где
![]() – коэффициент передачи разомкнутой
системы по возмущению f2.
– коэффициент передачи разомкнутой
системы по возмущению f2.
При
![]() получим:
получим:
![]()
 .
.
При
![]() получим:
получим:
 .
.
При
![]() получим:
получим:
 .
.
По возмущению f2 рассматриваемая система имеет астатизм первого порядка. Она не в состоянии отработать возмущающее воздействие, изменяющееся во времени с постоянным ускорением.
Подведем некоторые итоги:
1. Наличие и глубина свойства астатизма зависят от точки приложения входного сигнала.
2. Постоянные времени звеньев системы не влияют на ее точность.
3. Увеличение значения коэффициента передачи разомкнутой системы приводит к снижению величины установившейся ошибки.
Для систем с единичной отрицательной обратной связью существуют достаточно простые структурные признаки астатизма.
Рассмотрим структуру, показанную на рисунке 119.

В общем случае передаточная функция разомкнутой системы может быть представлена в следующей форме:
 ,
,
где l0.
Тогда получим:

и для общего вида
задающего воздействия
![]() ,
которому соответствует изображение
,
которому соответствует изображение
![]() ,
,
 .
.
Результат нахождения этого предела зависит от соотношения показателей степени:
- при l>v установившаяся ошибка равна нулю независимо от остальных параметров, то есть имеет место астатизм;
- при l=v получаем константу;
- при l<v установившаяся ошибка стремится к бесконечности, то есть система не в состоянии отработать входной сигнал.
Учитывая, что минимальное значение v нулевое, получаем условие астатизма по задающему воздействию: l>0.
Таким образом, структурный признак астатизма по задающему воздействию в системе с единичной отрицательной обратной связью состоит в наличии нулевых корней в знаменателе передаточной функции разомкнутой системы, или интегрирующих звеньев в прямой цепи системы.
Нетрудно также убедиться, что положительное значение l совпадает с порядком астатизма.
Для получения признака астатизма по возмущающему воздействию представим передаточные функции на рисунке 10 в форме:
 ,
,
 ,
,
где l1+l2=l,
k1k2=k,
m1+m2=m,
n1+n2=n,
причем
![]() и
и
![]() .
.
Тогда получим:


и для общего вида
возмущающего воздействия
![]() ,
которому соответствует изображение
,
которому соответствует изображение
![]() ,
,
 .
.
Все вышеприведенные выводы можно повторить для показателя степени l1.
Таким образом, структурный признак астатизма по возмущающему воздействию в системе с единичной отрицательной обратной связью состоит в наличии нулевых корней в знаменателе передаточной функции участка системы до точки приложения воздействия, или интегрирующих звеньев на том же участке.
Более общий подход к оценке точности линейных систем управления основан на получении и использовании коэффициентов ошибок. Рассмотрим его на примере анализа реакции системы на задающее воздействие.
Если рассматривать произвольный закон изменения задающего воздействия g(t), то эта функция времени может быть разложена в степенной ряд относительно аргумента t. Члены степенного ряда, как известно, находятся через производные
![]() ,
,
![]() ,
…,
,
…,
![]() ,
…
,
…
В общем случае ряд бесконечен. Поэтому с практической точки зрения рассматривать такое представление сигнала целесообразно только при достаточно плавном его изменении, когда можно ограничиться конечным числом членов ряда, имея в виду, что при n большем некоторого m можно принять
![]() ,
n>m.
,
n>m.
Для задачи оценки
установившейся ошибки при
![]() с формулированное допущение вполне
корректно, так как в противном случае
эта задача не имеет смысла.
с формулированное допущение вполне
корректно, так как в противном случае
эта задача не имеет смысла.
Коэффициенты ошибки получают разложением передаточной функции замкнутой системы по ошибке в степенной ряд (ряд Тейлора) относительно аргумента s:
![]() ,
,
где коэффициенты разложения в общем случае находят как значения производных в точке s=0:
 .
.
Передаточные функции, представляющие собой отношения полиномов, при достаточно высоком порядке системы могут оказаться слишком сложными для дифференцирования. Поэтому на практике коэффициенты их разложения в ряд чаще находят путем деления полиномов – числителя на знаменатель.
С учетом разложения передаточной функции в ряд можно записать изображение по Лапласу сигнала ошибки в следующей форме:
![]() .
.
Отметим, что с
учетом сформулированного выше допущения
такое представление сигнала ошибки
соответствует
![]() или
или
![]() .
.
Перейдя к оригиналу с учетом теоремы дифференцирования получим:
![]() .
.
Вернемся к
рассмотренному выше примеру и предположим,
что задающее воздействие изменяется
по произвольному закону, но при достаточно
больших значениях времени этот закон
аппроксимируется выражением
![]() .
.
Найдем коэффициенты разложения передаточной функции по ошибке

в степенной ряд.
Здесь сразу можно отметить, что номер первого ненулевого члена ряда определяется низшей степенью аргумента s в числителе дроби, то есть первые два коэффициента c0 и c1 здесь получаем тождественно равными нулю.
Далее получим:





В результате
получаем
![]() ,
,
![]() ,
,
![]() ,
,
![]() и так далее.
и так далее.
Найдем производные задающего воздействия:
![]() ,
,
![]() ,
,
![]() .
.
Ясно, что для определения установившейся ошибки достаточно первых трех коэффициентов:
![]() .
.
В заключение отметим, что порядок астатизма системы по какому-либо входному сигналу совпадает с количеством нулевых коэффициентов ошибки, получаемых в разложении в ряд передаточной функции по ошибке от данного входного сигнала.