Конспект ТАУ / Лекция 5
.docЛекция 5. Типовые динамические звенья
К типовым относят ряд динамических звеньев, которые с одной стороны достаточно просты и удобны для исследования, с другой стороны, обладают набором основных динамических свойств, характерных для звеньев и систем управления.
С точки зрения общности основных свойств типовые динамические звенья объединяют в три группы.
Рассмотрим последовательно по группам типовые динамические звенья и примеры их технической реализации, базируясь на общей модели (рисунок 15а).
Позиционные звенья
1. Безынерционное звено с передаточной функцией W(s)=k и уравнением x2=kx1. Некоторые примеры технической реализации показаны на рисунках: делитель напряжения (рисунок 28а), операционный усилитель (рисунок 28б), редуктор и потенциометрический датчик были рассмотрены в примере следящей системы.

2. Апериодическое
звено 1-го
порядка с
передаточной функцией
![]() и уравнением
и уравнением
![]() .
Рассмотрим подробно некоторые примеры
технической реализации.
.
Рассмотрим подробно некоторые примеры
технической реализации.
2а – RC-цепочка (рисунок 29).

Составим уравнения, описывающие процесс в этой схеме
u1-uR-uC=0,
uR=Ri,
![]() ,
,
uC=u2
и перейдем к дифференциальному уравнению динамического звена:
![]() ,
,
![]() ,
,
![]() ,
T=RC,
k=1.
,
T=RC,
k=1.
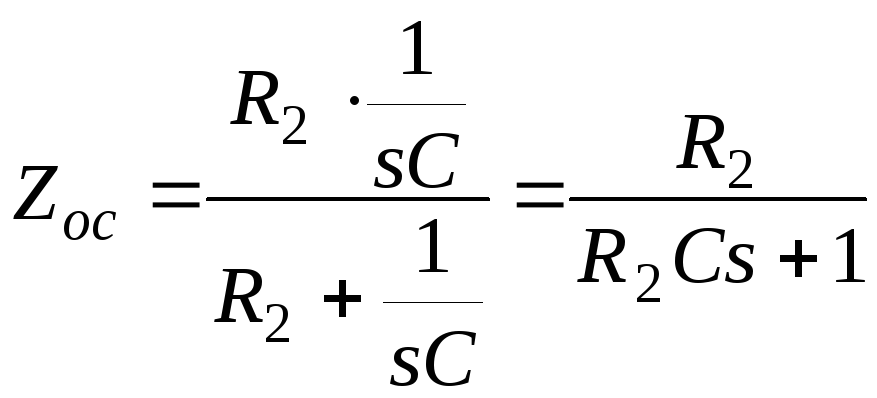
2б – операционный усилитель (рисунок 30).

Используя приближенное соотношение:
![]() ,
,
где Zвх и Zос – комплексные сопротивления входной цепи и цепи обратной связи операционного усилителя, получим передаточную функцию:
![]() ,
,
![]() ,
,
 ,
,
![]() ,
,
![]() ,
,
![]() .
.
2в – электрический двигатель постоянного тока с независимым возбуждением из примера следящей системы при условии, что постоянная времени TE достаточно мала и ей можно пренебречь.
3. Апериодическое
звено 2-го
порядка с
передаточной функцией
![]() и уравнением
и уравнением
![]() или
или
![]() при условии
при условии
![]() ,
обеспечивающем вещественные корни
характеристического уравнения. Примеры
технической реализации:
,
обеспечивающем вещественные корни
характеристического уравнения. Примеры
технической реализации:
3а – различные четырехполюсники (рисунок 31).

3б – электрический
двигатель постоянного тока с независимым
возбуждением из примера следящей системы
при условии
![]() .
.
4. Колебательное
звено с
передаточной функцией
![]() и уравнением
и уравнением
![]() ,
где коэффициент демпфирования 0<
или
,
где коэффициент демпфирования 0<
или
![]() при условии
при условии
![]() ,
обеспечивающем комплексные корни
характеристического уравнения. Примеры
технической реализации:
,
обеспечивающем комплексные корни
характеристического уравнения. Примеры
технической реализации:
4а – колебательный контур (рисунок 32).

4б – электрический
двигатель постоянного тока с независимым
возбуждением из примера следящей системы
при условии
![]() .
.
5. Консервативное
звено с
передаточной функцией
![]() и уравнением
и уравнением
![]() - идеализация колебательного звена при
коэффициенте демпфирования =0.
Наиболее распространенный пример
технической реализации – идеальный
колебательный контур (рисунок 33).
- идеализация колебательного звена при
коэффициенте демпфирования =0.
Наиболее распространенный пример
технической реализации – идеальный
колебательный контур (рисунок 33).

Интегрирующие звенья
6. Идеальное
интегрирующее звено
с передаточной функцией
![]() и уравнением
и уравнением
![]() .
Некоторые примеры технической реализации
показаны на рисунках: RC-цепочка
с током в качестве входного сигнала
(рисунок 34а), операционный усилитель
(рисунок 34б), тормозной цилиндр (рисунок
34в).
.
Некоторые примеры технической реализации
показаны на рисунках: RC-цепочка
с током в качестве входного сигнала
(рисунок 34а), операционный усилитель
(рисунок 34б), тормозной цилиндр (рисунок
34в).

7. Интегрирующее
звено с замедлением
с передаточной функцией
![]() и уравнением
и уравнением
![]() .
Некоторые примеры технической реализации:
.
Некоторые примеры технической реализации:
7а – цепь на операционных усилителях (рисунок 35).

7б – электрический двигатель постоянного тока с независимым возбуждением при пренебрежимо малой постоянной времени TE и выбором в качестве выходного сигнала угла поворота вала двигателя.
8. Изодромное
звено с
передаточной функцией
![]() или
или
![]() и уравнением
и уравнением
![]() .
Пример его технической реализации
(ПИ-регулятор) показан на рисунке 36.
.
Пример его технической реализации
(ПИ-регулятор) показан на рисунке 36.

Дифференцирующие звенья
9. Идеальное
дифференцирующее звено
с передаточной функцией
![]() и уравнением
и уравнением
![]() .
Пример технической реализации –
тахогенератор при большом сопротивлении
нагрузки (рисунок 37).
.
Пример технической реализации –
тахогенератор при большом сопротивлении
нагрузки (рисунок 37).

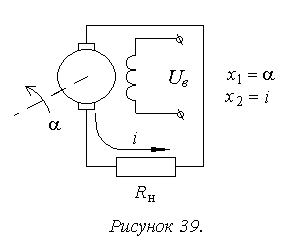
10. Дифференцирующее
звено с замедлением
с передаточной функцией
![]() и уравнением
и уравнением
![]() .
Примеры технической реализации:
.
Примеры технической реализации:
3а – различные четырехполюсники (рисунок 38).

3б – тахогенератор с учетом сопротивления нагрузки (рисунок 39).