

Молодой сазан / молодой сазаннннн2 / Lab_4_MatLab
.docЛабораторная работа №3
Исследование законов управления САУ
Цель работы: исследование пропорционального, интегрального и дифференциального закона управления и влияния его на точность САУ.
Общие сведения
При законном управления понимается алгоритм управления, в соответствии которым регулятор форматирует управляющее воздействие u(t). Эта зависимость может быть представлена в виде:
![]() ,
,
где х3
– задающее воздействие;
![]() - ошибка управления;
- ошибка управления;
![]() - возмущающее воздействие.
- возмущающее воздействие.
Существует три основных закона управления автоматической системы: пропорциональный, интегральный и дифференциальный.
1. Пропорциональный закон управления ( этот закон характерен для так называемых статических САУ). Передаточная функция П – регулятора в этом случае равна:
![]() ;
;
В установившемся режиме, т.е. при t→∞ (s→0)
![]() ;
;
Пропорциональное управление используется только для систем стабилизации (х3 = const)
Статическая ошибка
управления в отсутствие возмущения (f
= 0) определяется так
![]() ,
,
где К1 – коэффициент передачи регулятора;
К0 – коэффициент передачи объекта управления
2. Интегральный закон управления (система, у которых используется данный закон называется астатической САУ).
Передаточная функция И – регулятора равна
![]()
Существует два режима работы данной САУ в зависимости от задающего воздействия Хз.
При работе САУ
режиме стабилизации (х3
= const)
статическая ошибка
![]() равна нулю, так как
равна нулю, так как
![]()
![]()
В случае следующей
системы, когда
![]() ,
т.е. входное воздействие меняется по
линейной зависимости, так называемая
скоростная ошибка
,
т.е. входное воздействие меняется по
линейной зависимости, так называемая
скоростная ошибка
![]() равна
равна
![]() ,
,
В этой формуле Д
= К2К0
называется добротностью САУ следящей
САУ по скорости
![]()
3. Пропорционально-интегральное уравнение
Передаточная функция ПИ – регулятора равна:
![]()
4. Пропорционально-интегрально-дифференциальное уравнение
Передаточная функция ПИД – регулятор равна:
![]()
2.1. Моделирование передаточных функций в MatLab
В пакете MatLab имеется два основных варианта для исследования передаточных функций и моделирования САУ:
-
использование команд пакета расширения Control System Toolbox;
-
использование пакета Simulink.
Control System Toolbox предназначен для работы с LTI-моделями (Linear Time Invariant Models – линейные модели с постоянными параметрами) систем управления.
Команда, создающая LTI-систему с одним входом и одним выходом в виде передаточной функции, имеет следующий синтаксис:
![]()
где
![]() и
и
![]() –
значения
коэффициентов полиномов В
и
А
в (3).
–
значения
коэффициентов полиномов В
и
А
в (3).
Например, если требуется описать ПФ вида
![]()
и узнать значения ее нулей и полюсов, то нужно ввести в окне команд MatLab следующие команды:
>> w=tf([1 1],[2 8 5])
>> zero(w)
>> pole(w)
Исследовать реакцию LTI-модели на типовые входные воздействия можно с помощью команд
>> step(w)
>> impulse(w)
Можно получить на одном графике реакцию сразу нескольких динамических звеньев, если использовать команды вида:
>> step(w,w1,w2)
>> impulse(w, w1 ,w2)
В приведенных примерах время моделирования выбирается автоматически. При необходимости его можно явно указать в команде
>>step(w, w1, w2,t),
где t - время моделирования в секундах.

Рис. 1. Исследование реакции колебательного звена
На рис. 1 показан пример моделирования динамики колебательного звена при различных параметрах:
>> w=tf([1],[2 0.3 1]);
>> w1=tf([1],[2 0.5 1]);
>> w2=tf([1],[2 0.1 1]);
>> step(w,w1,w2,50).
В Simulink ПФ можно описать с помощью блока Transfer Fcn в разделе библиотеки Continuous. Для подачи типовых воздействий надо использовать блок Step из раздела Sources. Импульсную переходную характеристику звена можно получить, подавая на вход импульс маленькой длительности и большой амплитуды (приближение δ-функции) при нулевых начальных условиях.
Порядок выполнения работы
1 .
С помощью программы MATLAB создать модель
САУ с П-регулятором.
.
С помощью программы MATLAB создать модель
САУ с П-регулятором.
Созданная модель САУ с П-регулятором с помощью программы MATLAB

2. Задавая значения
К = 1, 10, 60 построить переходные процессы
![]() и
и
![]() при единичном ступенчатом воздействии.
при единичном ступенчатом воздействии.
3. Определить
значения ошибки управления
![]() расчетным путем и сравнить их с
экспериментальными.
расчетным путем и сравнить их с
экспериментальными.
4. Создать модель САУ с И – регулятором.
5. Задаваясь
значениями К2
= 1, 10, 60 построить переходные процессы
![]() и
и
![]() .
.
6. Определить
установившуюся величину статической
ошибки
![]() .
.
7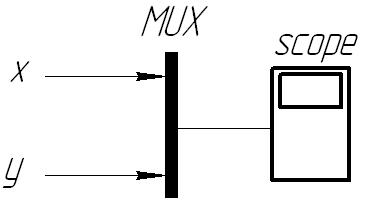
 .
Теперь после источника STEP
поместить интегрирующее звено
.
Теперь после источника STEP
поместить интегрирующее звено
![]() ,
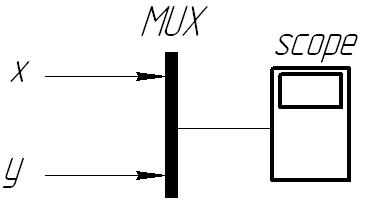
а перед осциллографом scope
поместить
мультиплексор и приняв значение К2
= 10 построить
,
а перед осциллографом scope
поместить
мультиплексор и приняв значение К2
= 10 построить
![]() и
и
![]() при следующих значениях К = 1, 10;
при следующих значениях К = 1, 10;
8. Рассчитать
скоростные ошибки
![]() для этих значений и сравнить их с
экспериментальными.
для этих значений и сравнить их с
экспериментальными.
9. Создать САУ с ПИ – регулятором.

1 0.
Построить зависимости
0.
Построить зависимости
![]() ,
,
![]() .
.
11. Заменить источник
STEP на
источник RAMP
и определить величину скоростной ошибки
![]() ,
на вход scope
поставить
мультиплексор MUX.
,
на вход scope
поставить
мультиплексор MUX.
12. Создать САУ с ПИД – регулятором.
13. Построить
зависимости
![]() и
и
![]()

14. Заменить источник
STEP
на источник RAMP
и определить скоростную ошибку
![]() ,
на вход scope
поставить
мультиплексор MUX.
,
на вход scope
поставить
мультиплексор MUX.
Содержание отчета
Отчет должен содержать название, цель работы, расчеты. графики и выводы по работе.
Контрольные вопросы
-
Как зависит статическая ошибка от коэффициента передачи разомкнутой системы?
-
Чему равна статистическая ошибка в астатической системе при воздействии – 1(t)?
-
Что такое добротность по скорости?
-
В чем преимущество П-регулятора по сравнению с И-регулятором?
3. Порядок выполнения работы
1. Получить у преподавателя вариант выполнения работы.
2. С помощью пакета MatLab построить реакцию каждого типового звена с параметрами своего варианта (см. таблицу 2) на ступенчатое и импульсное входное воздействие. Определить влияние коэффициентов, входящих в описание каждого звена на параметры переходного процесса.
Таблица 2
|
№ |
Апериод звено |
Апериодич. звено 2 пор. (колеб. звено) |
Интегр звено |
Изодр. звено |
Реальное диф. звено |
Инерц.-форс Звено |
|||||||
|
K |
T,[с] |
K |
T,[с] |
ξ |
K |
K1 |
K2 |
K |
τ [с] |
K |
T0 [с] |
T [с] |
|
|
1,9,17 |
2 |
0,2 |
1 |
0,2 |
2,0 (0,2) |
2 |
2 |
0,5 |
2 |
0,4 |
2 |
2 |
0,8 |
|
2,10,18 |
3 |
0,3 |
2 |
0,3 |
1,5 (0,15) |
3 |
3 |
1 |
3 |
0,3 |
3 |
3 |
1,2 |
|
3,11,19 |
4 |
0,4 |
3 |
0,4 |
2,5 (0,25) |
4 |
4 |
0,8 |
4 |
0,5 |
4 |
4 |
1,5 |
|
4,12,20 |
5 |
0,5 |
4 |
0,5 |
1,6 (0,3) |
5 |
5 |
2 |
5 |
1,0 |
5 |
5 |
2,0 |
|
5,13,21 |
6 |
0,6 |
5 |
0,6 |
2,8 (0,2) |
6 |
6 |
3 |
6 |
0,8 |
6 |
6 |
2,0 |
|
6,14,22 |
7 |
0,7 |
6 |
0,7 |
2,2 (0,08) |
7 |
7 |
3,5 |
7 |
1,0 |
7 |
7 |
2,0 |
|
7,15,23 |
8 |
0,8 |
7 |
0,8 |
2,1 (0,07) |
8 |
8 |
1 |
8 |
0,9 |
8 |
8 |
3,0 |
|
8,16,24 |
10 |
1,0 |
8 |
1,0 |
3,0 (0,1) |
10 |
10 |
2,0 |
10 |
2,0 |
1,0 |
10 |
4,0 |