

интегр. и диффер.сигналов
.pdf2. U |
|
|
dUв х |
RC |
dUв х |
RC(4 103 ) 104 |
10 7 |
4 103 |
4 B |
в ых |
|
|
|||||||
|
|
dt |
|
dt |
|
|
|
||
|
|
|
|
|
|
|
|||
Выходной сигнал – это прямоугольная волна амплитудой Uм=4 В частоте которой равна частоте входного сигнала.
Пример 2. На вход дифференциатора с R=10кОм; С=0,1 мкФ подается прямоугольная волна с амплитудой 5 В и частотой следования 5 кГц. Время нарастания и спада импульсов tнар=tсп=1мкС. Изобразить выходной сигнал.
1. На участках
а) от t0 до t1 Uвых=SB=cоnst,
поэтому Uвых=0
б) от t1 до t2 Uвых=0=cоnst,
поэтому Uвых=0
2. При tп = tС, то выходные напряжения во время нарастания будет равно выходному напряжению во время спада.
Выразим эти участки Uвх в функциях времени.
t |
|
t |
|
|
U max |
t |
5 |
t 5 10 6 t |
|
н |
C |
tн |
10 6 |
||||||
|
|
|
|
|
|||||
|
|
|
|
|
|
|
3.Дифференцируя, получаем:
U |
|
RC |
dUв х |
RC 5 106 |
104 10 7 106 5 5 103 |
B |
в ых |
|
|||||
|
|
dt |
|
|
||
|
|
|
|
|
||
Выходное напряжение ОУ будет состоять из двух импульсов противоположной полярности, длительностью 1 мкс, амплитуде которого равна максимально возможному выходному напряжению ОУ. ОУ усилитель должен иметь скорость нарастания выходного
напряжения UU U в ых.max .
tн
Пример 3. Рассчитать цепь динамической стабилизации дифференциатора с R=10кОм; С=0,1 мкФ, если максимальный коэффициент усиления равен К=1000, а

максимальная частота дифференцируемого сигнала fmax=10 кГц при ориентируемой погрешности δg=1%.
1. При погрешности дифференцирования δ=1% максимальная рабочая частота должна быть:
|
fmax 0,1 f1 0,1 |
|
|
|
1 |
; откуда |
f1 10 fmax |
100кГц |
|||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||
|
2 RK C |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
2. |
Так как нас интересует только дифференцирование, то выбираем f1=f2 или |
|||||||||||||||||||||||||
1 |
|
1 |
|
|
100 кГц |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
2 RK C |
2 RCK |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
3. |
Т.к. K |
|
|
|
R |
|
, то |
R |
|
|
|
|
R |
|
|
|
104 |
10 Ом |
||||||||
|
max |
|
|
|
K |
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
RK |
|
|
|
|
|
Kmax |
103 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R |
K |
C |
|
|
10 10 7 |
||||
|
4. |
Т.к. R |
|
|
C RC |
|
|
, то |
C |
|
|
|
|
|
|
|
|
|
10 10Ф 0,1нФ |
||||||||
|
K |
K |
K |
|
R |
104 |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Неинвертирующий дифференциатор
Входное сопротивление основной схемы дифференциатора имеет емкостной характер, что в некоторых случаях является нежелательным. Так, если в качестве источника сигнала используется ОУ он может легко стать неустойчивым.
Поэтому данная схема дифференциатора оказывается более подходящей. Ее входное сопротивления на высоких частотах Zвх=R.
|
|
1 |
U |
|
|
|
||
|
R |
|
|
|
1 |
|
||
U |
|
|
|
||
|
R |
|
|
||
|
U в ч pc |
||
pc |
|||
|
|
|
|
|
|
1 |
|
pc |
U в ых |
|
|
R |
|||
|
|
||
U 1 RCp U в хRССU 1 RCp U в ых
U |
|
U в ых |
; т.к. U U , |
что Uв ых RCpUв х , переходя от изображения |
|
RCp |
|||
1 |
|
|
||
к оригиналу, получим: |
U в ых RC |
dU в х |
|
dt |
|||
|
|
Для обеспечения устойчивости включают демпфирующий резистор R1/ Принцип действия состоит в следующем
1.Переменные Uвх Н4 будет дифференцироваться входной RC –цепочкой. ОУ
вданной области частот, работает как повторитель с Кос=1.
2.Переменные Uвх высокой частоты будет полностью проходить через входную RC цепь и дифференцироваться при помощи ОУ, охваченного ООС (RC).

Если постоянные времени этих цепочек достаточно большие, то области дифференцирования сигналов В4 и Н4 будут перекрываться.
Суммирующий дифференциатор
Подобно другим решающим схемам дифференциатор также может быть одного
входа.
Для идеального ОУ можно записать при Iвх=0; Uв х 0
|
|
|
|
|
|
|
ic1 ic2 |
... icn i2 |
|||
C |
dU1 |
C |
dU |
2 |
... C |
|
dU n |
|
U в х |
где п – число входов |
|
|
|
|
n |
|
|
||||||
|
dt |
|
dt |
|
|
dt |
|
R |
|
||
|
|
|
|
|
|
|
|||||
дифференциатора. Следовательно:
|
|
|
|
dU |
1 |
|
|
dU |
2 |
|
|
dU |
n |
|
U |
|
R C |
|
C |
|
|
... C |
|
|
|
||||
|
|
|
2 dt |
|
|
|
|
|||||||
|
в ых |
|
1 |
dt |
|
|
|
|
n |
dt |
|
|
||
Естественно, в этой схеме необходимо вводить динамическую стабилизацию.
Дифференциатор-усилитель
Д-У сочетает в одной решающей схеме способность реагировать как на величину, так и на скорость изменения входного сигнала. Эта схема, по существу, представляет собой комбинацию усилителей и дифференциатора.
Выходное напряжение данной схемы:
U в ых |
R |
U в х RC |
dU в х |
|
R1 |
dt |
|||
|
|
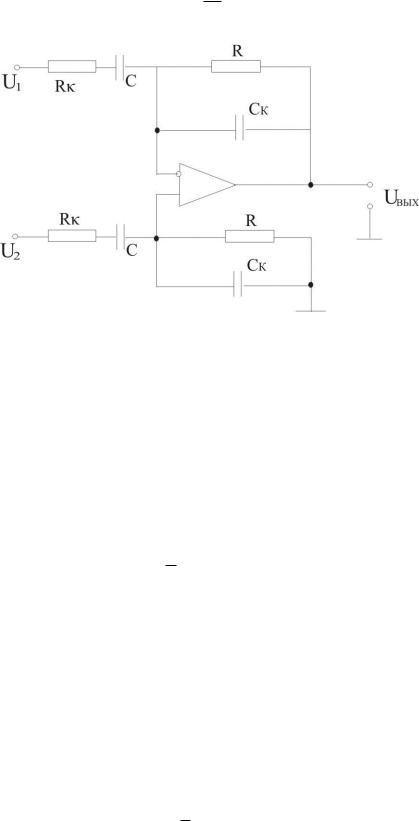
Разностный дифференциатор
Дифференциатор можно использовать также в варианте с дифференциальным
входом.
Выходное напряжение схемы определяется выражением:
U RC d (U U )
в ых dt 2 1
Для минимизации погрешности необходимо хорошее согласование компонент.
Решение дифференциальных уравнений
Многие задачи описываются простыми дифференциальными уравнениями. Решение таких задач можно провести, реализуя дифференциальные уравнения с помощью описанных схем и измеряя установившееся выходное напряжение. Чтобы не возникло проблемы устойчивости, следует преобразовать исходное дифференциальное уравнение таким образом, чтобы вместо дифференциалов использовать только интеграторы.
Пусть имеем следующее линейное дифференциальное уравнение второго
порядка:
y k1 y k0 y f (x)
заменяем независимую переменную х на время t.
x t , откуда t x
На основании правил дифференциального исчисления
|
dy dy dt |
|
dy |
|
2 |
||||||
|
|
|
|
|
|
|
|
|
|
||
y dx dt dx dt y и y |
y |
||||||||||
|
|||||||||||
После подстановки производных в исходные уравнения получим:
2 |
|
|
|
|
t |
||
ko y |
f |
|
|
||||
y |
k1 y |
|
|
|
|||
|
|
|
|
|
|
|
|
Разрешим данные уравнения относительно производных
|
|
t |
2 |
|
||
ko y |
f |
|
|
|||
|
|
y |
k1 y |
|||
|
|
|
|
|
|
|
Умножим обе части уравнения на 1 и возьмем интеграл:

|
1 |
|
t |
|
|||
|
|
|
ko y f |
|
dt y |
k1 y |
|
|
|
||||||
|
|
|
|
|
|||
Выражение в левой части уравнения можно реализовать с помощью простого суммирующего интегратора. Его выходное напряжение является переменной состояния Zn, где п – порядок дифференциального уравнения. Для п=α, имеем:
|
|
1 |
|
t |
||
Z2 |
|
|
ko y f |
|
dt |
|
|
|
|||||
|
|
|
|
|
||
Будем считать, что выходная величина известна.
Так как Z2 y k1 y тоже дифференциальное уравнение, его можно решить
аналогично, т.е.
Z2 k1 y y
1 Z2 k1 y dt y
Левая часть этого уравнения является переменной состояния Z1:
Z1 1 Z2 k1 y dt
Это выражение можно реализовать при помощи второго суммирующего
интегратора. Для выходного сигнала имеем:
y Z1
Поскольку здесь нет производных, то преобразования закончены.
Необходимые для решения дифференциального уравнения вычислительные операции можно представить в виде графа.
Соответствующая этому графу аналоговая схема будет иметь такой вид:
а) Если входное напряжение синусоидальное (или в общем случае переменное), необходимо использовать корректирующие сопротивления Rp.
б) Если Uвх – ступенчатая функция, то напряжение на конденсаторах необходимо периодически сбрасывать.