

Линеаризация методы
.pdfЛинеаризация функций преобразователей Одним из важнейших условий применения первичных
преобразователей в измерительных схемах контроля является линейность их функций преобразования (т.е. независимость статических характеристик от значений преобразуемой величины.)
Совокупность математических, конструкторско-технологических и структурных на обеспечение с заданной точностью линейной функции преобразования называется линеаризацией функции преобразования.
Наиболее универсальными методами линеаризации являются структурные методы линеаризации. Их сущность заключается в применении дополнительных корректирующих устройств, соответствующим образом, включаемых в тракт преобразования.
Рассмотрим некоторые общие вопросы линеаризации мостовых схем датчиков.
1.Коррекция нелинейности измерительной схемы При построении мостовых датчиков существует возможность изменять
функцию преобразования введением специальной обратной связи:
а) введение обратной связи, которая изменяет напряжение U П (или I П ) тока питания схемы в зависимости от выходного напряжения моста.
Для большинства мостовых схем выходное напряжение имеет соотношение вида:
U ВЫХ U |
|
RX |
a |
|
П b(cRX |
d ) |
|||
где a,b, c, d - постоянные (в общем случае размерные коэффициенты) |
||||
коэффициенты a и /или c могут быть равны 0.
Представим напряжение питания в виде суммы постоянной составляющей U ГО и составляющей, пропорциональной выходному напряжению:
U П U ПО U ВЫХ
Подставив U П в выражение для U ВЫХ , получим:
U ВЫХ U ПО |
|
RX a |
|
b(cRX |
d ) (RX |
a) |
Из данного выражения видно, что изменением коэффициента , можно изменить характер зависимости U ВЫХ от RX
1. если bc зависимость U ВЫХ от RX будет линейной.
2.при bc зависимость U ВЫХ от RX будет нелинейной с увеличивающейся к концу шкалы чувствительностью.
3.при bc чувствительность преобразователя будет уменьшаться с
ростом RX .
Таким образом можно получить желаемую функцию преобразователя которая будет корректировать погрешность нелинейности.
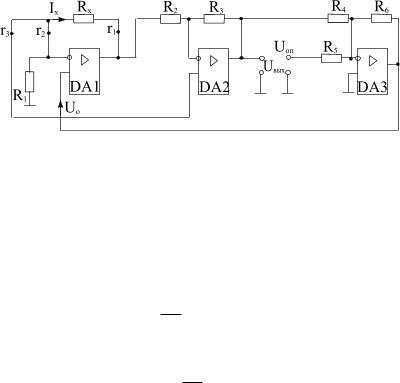
Пример: схема коррекции нелинейности резистивного датчика RX .
Ток через резистор RX
I |
|
|
U 0 |
т.к. I |
|
0 |
|
X |
R1 |
ВХ .ОУ |
|||||
|
|
|
|
||||
|
|
|
|
|
|
где U 0 - напряжение на инвертирующем входе ОУ Выходное напряжение DA1:
U ВЫХ .1 U 0 R1 RX r1 r2 R1
Это напряжение подается на n-вход DA2, а Н – вход подается напряжение:
U
U R0 (r2 r1 )
1
Выходное напряжение DA2 будет равно:
U вых2 |
U |
|
(R1 r2 )R2 (Rx r1 )R3 |
|
0 |
R1 |
R2 |
||
|
|
|
||
Чтобы сопротивление проводов не влияло на результат преобразования, необходимо r2 R2 r1 R3 . Считая, что сопротивление проводов
r1 r2 |
и принимая R2 R3 , тогда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U |
|
|
U 0 (R1 Rx ) |
. |
|
|
|||||||||
|
вых |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
R1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выходное напряжение сумматора ДА3 равно сумме опорного |
|||||||||||||||
напряжения U оп и напряжения U вых , тогда |
|
|
|
|
|
|
|
|||||||||
|
U 0 U оп |
|
R6 |
|
U вых |
R6 |
. |
|
||||||||
|
|
R |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
R |
4 |
|
|
|||||
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|||
|
Подставляя выражение для U 0 в формулу для U вых : |
|||||||||||||||
|
U вых U оп |
R4 |
|
|
Rx |
R1 |
. |
|||||||||
|
R |
R1 |
(1 |
R4 |
|
) Rx |
||||||||||
|
|
|
5 |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
R6 |
|
|
|
|
|
|
В результате введения ОС (с выхода ДА2 на выход ДА3) мы получим увеличение чувствительности преобразователя с ростом RX .
б) Линеаризация характеристики мостовой схемы путем использования ООС, воздействующей на напряжение разбаланса.
В данной схеме датчик включается в цепь ОС ОУ.
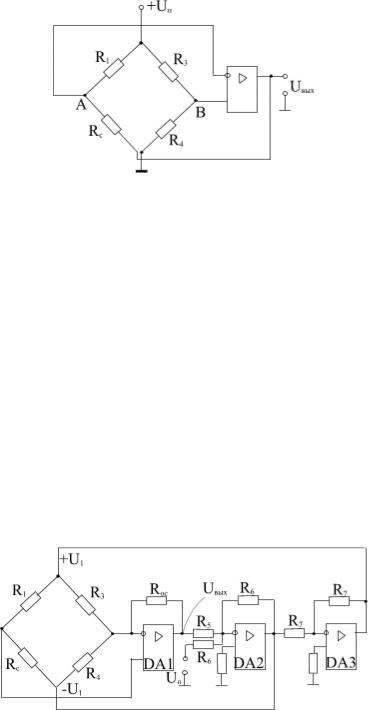
Резисторы R1 R3 |
R4 |
R6 . Сопротивление датчика: |
Rc |
Rco Rc . |
|||||||||||||||||||||||||||||||||||||||||
Определим: напряжение разбаланса U p |
U B U A ; |
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
|
U |
|
|
U п |
; U |
|
|
|
|
|
Rc |
|
|
U |
|
|
|
|
Rco |
|
|
U |
|
, |
|
||||||||||||||||||
|
|
B |
|
2 |
A |
Rco Rc |
|
п |
Rco |
Rc |
|
|
вых |
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
U |
( |
1 |
|
1 |
|
) |
U п |
|
|
U вых |
;U |
|
|
|
Rc |
Rco |
|
U п |
|
U вых |
. |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
A |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
A |
|
Rc |
|
|
Rco |
|
Rco |
|
|
|
|
|
|
Rc |
|
|
Rc |
Rco |
|
|
|
Rco |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rc |
||||||||||||||||||||||||
Т.к. напряжение между входами ОУ равно нулю. |
|
|
|
||||||||||||||||||||||||||||||||||||||||||
Поэтому U A U B , откуда: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
U п |
|
|
Rc |
|
|
U |
|
|
|
|
Rco |
|
|
|
U |
|
|
, откуда |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
п |
|
|
|
|
|
|
|
|
вых |
|
|
||||||||||||||||||||||
|
|
|
|
|
2 Rco Rc |
|
|
|
|
Rco |
Rc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
U |
|
|
|
|
U п |
|
Rco Rc |
|
|
U п |
|
Rc |
. |
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
вых |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
Rco |
|
|
|
|
|
|
|
|
|
2 |
|
|
|
Rco |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
в) Линеаризация характеристики мостовой схемы использованием двойной обратной связи.
В данной схеме одна ОС воздействует на напряжение разбаланса и на напряжение питания моста.
Мост образован плечами сопротивлений:
R1 R2 R3 Rco , аRc Rco R
ООС ДА1 действует в направлении устранения разбаланса моста.
Напряжение |
|
|
|
|
|
U |
|
|
U |
|
Rco 2Roc |
|
Rc |
|
, |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
вых |
|
1 2R |
R |
|
R |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
co |
|
|
|
c |
|
co |
|
|
|
|
|||
|
|
|
|
1 |
|
|
|
1 |
|
) U1 |
1 |
|
U1 |
1 |
|
|
|
|
|
|
|
||||||
U |
|
( |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Rc |
Rco |
Rc |
Rco |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
т.к. U U , |
||||||||||
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
1 |
|||
U ( |
|
|
) U |
|
|
|
U |
|
|
|
U |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
Roc |
|
|
Rc |
|
|
1 |
|
Rc |
|
1 |
|
Rc |
|
|
вых |
Roc |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
U1 |
Rco Rc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
R R |
|
|
|
|
R |
|
R |
|
|
|
|
|
R |
|
|
||||||||||||||||
U |
|
|
|
|
|
c |
co |
U |
|
|
co |
|
|
c |
U |
|
|
|
|
c |
|
, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
Rc Rco |
|
|
1 R R |
|
|
|
1 2R |
co |
R |
c |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
co |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Rc Rco |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
U вых |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
U1 |
|
|
|
Roc |
|
|
|
U вых |
|
|
|
Rco |
|
, |
|
|
|
|
|||||||||||
|
|
|
|
|
2Roc |
Rc |
2R |
oc |
R |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
co |
|
|
|
|
|||
|
|
|
|
|
|
|
|
Roc Rc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
U вых Rco |
|
U1 |
Rc |
|
U |
|
|
|
U1 |
(2Roc |
Rco ) |
Rc . |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
вых |
|
|
|
|
|
|
|||||||||||||||
2Roc Rcp |
|
|
2Rcp Rc |
|
|
|
|
|
|
|
2Rcp Rc |
|
Rco |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
Напряжение питания моста U1 задают сумматор ДА2 и инвертор ДА3, при этом:
|
|
|
|
|
|
|
|
U |
|
|
|
R6 |
U |
|
|
|
|
U |
|
|
R6 |
|
U |
|
|
Rco 2Roc |
|
Rc |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
U |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
|
|
|
1 |
|
п |
R |
|
вых |
п |
R |
1 2R |
R |
R |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
co |
|
|
|
c |
|
|
co |
|
|
|
|
|||||||
Задавая отношение |
|
|
R6 |
|
|
|
|
Rco |
|
|
|
|
, получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
R |
|
2R |
oc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
co |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U |
|
U |
|
|
|
|
|
Rco |
|
|
|
U |
|
|
|
Rco 2Roc |
|
Rc |
U |
|
U |
|
|
|
Rc |
|
|
, |
|
|||||||||||||||||||||||
|
|
|
|
2R R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
1 |
|
п |
|
|
|
|
|
|
|
1 |
|
2R R R |
|
|
|
п |
|
|
|
1 2R R |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
oc |
|
|
|
co |
|
|
|
|
|
|
|
|
co |
|
|
|
|
c |
co |
|
|
|
|
|
|
|
|
|
co |
c |
||||||||||||
|
|
откуда U |
(1 |
|
|
Rc |
) U |
|
;илиU |
|
U |
|
2Rco Rc |
. |
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
п |
1 |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2Rco |
Rc |
|
|
|
|
|
|
|
|
|
|
|
|
п |
2Rco |
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
Тогда |
U |
|
|
|
|
U |
|
|
2Rco |
|
Rc |
|
Rco |
2Roc |
|
Rc |
|
U п |
(1 |
2Roc |
) |
Rc |
; |
|||||||||||||||||||||||||||||
вых |
п |
|
|
|
|
|
2Rco Rc |
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
2Rco |
|
|
|
|
|
|
|
Rco |
|
|
2 |
|
|
|
|
Rco |
|
Rco |
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
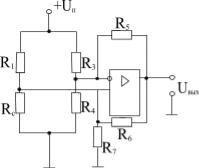
2). Линеаризация характеристики мостовой схемы воздействием ООС на напряжение разбаланса (с заземленным датчиком).
Здесь линеаризация осуществляется путем подачи дополнительного напряжения на преобразователь за счет положительной обратной связи,
подаваемой через делитель напряжения R6 |
R7 . |
|
|
||
Если выходная диагональ не нагружена, то напряжение на этой |
|||||
диагонали: |
|
|
|
|
|
U Д U п |
|
R1 R4 R3 R2 |
|
. |
|
(R R )(R R |
) |
||||
1 |
c |
3 4 |
|
|
|
Если измеряется под действием измеряемой величины только одно |
|||||
плечо моста, то функция преобразования будет нелинейной. |
|||||
Если R1 R3 R4 Rco ; Rc Rco |
Rc , |
|
|
||
|
Д U |
|
R 2 |
R R |
c |
U |
|
R R |
c |
|
U |
п |
|
R |
|
|
U |
п |
|
R |
|
|
1 |
|
|
U |
|
co |
co |
|
co |
|
|
c |
|
|
|
c |
|
|
|
|
. |
||||||||
п (R R )2R |
п 2(R R ) |
2 2R R |
|
4 R |
1 |
Rc |
|||||||||||||||||||
|
|
|
co |
c |
co |
|
|
co |
c |
|
|
|
|
co |
c |
|
|
|
|
co |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
2Rco |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В рассматриваемой схеме введением ПОС обеспечивает получение выходного напряжения:
|
Rc (R R ) ( |
1 |
|
|
1 |
|
1 |
) |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
co |
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U вых U п |
Rco |
|
|
|
|
|
R5 |
|
|
R6 |
|
R7 |
|
R5 |
. |
|
|
|
|
|
|
|||
|
Rc |
|
|
Rco |
|
|
|
R5 |
|
|
|
|
|
|
|
|
|
|||||||
|
1 (1 |
)(1 |
|
|
|
|
) |
|
|
R |
|
|
|
|
|
|
||||||||
|
Rco |
|
R7 |
|
2 R6 |
|
|
6 |
|
|
|
|
|
|
|
|||||||||
Из этого выражения следует: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1. Для того, чтобы Uвых |
0 при U Д |
0 |
необходимо, чтобы |
1 |
|
1 |
|
1 |
. |
|||||||||||||||
R5 |
R6 |
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R7 |
|||
2.Для того, чтобы обеспечить линейную зависимость U вых от Rc , необходимо:
|
2 |
R5 |
1 |
Rco |
, |
|
|||
|
|
|
|
|
|||||
|
|
R6 |
|
|
R7 |
||||
В результате получим: |
|
|
|
|
|
|
|
|
|
U |
|
U |
Rc |
|
R5 |
. |
|||
вых |
|
|
|||||||
|
|
|
Rco R6 |
||||||
|
|
|
|
||||||
Из известного значения Rco и задаваясь значением R5 значения резисторов R6 и R7 определяем по формулам:
R R |
2R5 Rco |
; R 2R R . |
||
R R |
||||
6 5 |
7 |
5 co |
||
|
5 co |
|
|
|
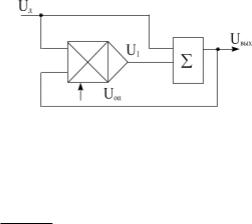
1.Коррекция погрешности линейности обработкой результата измерений (выходного сигнала).
Данный метод осуществляет нелинейное преобразование напряжения выходной диагонали U Д т.о., что выходное напряжение является
линейной функцией Rc .
где U Д |
|
U п |
|
Rc |
|
|
1 |
. |
||
4 |
|
|
|
|||||||
|
|
|
R |
|
|
|
Rc |
|||
|
|
|
|
co |
1 |
|
|
|
||
|
|
|
|
|
2Rco |
|
|
|||
Напряжение U1 на выходе умножителя:
U1 U Д U вых , где U оп - опорное напряжение.
U оп
Обозначим весовые коэффициенты сумматора с которыми осуществляется суммирование через а и в .
Тогда:
U |
|
|
aU |
|
|
вU |
|
|
|
aU |
|
|
в |
U Д U вых |
; |
||||||||||||||
вых |
Д |
1 |
Д |
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
U оп |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
откудаUвыхUоп аU ДUоп вU ДUвых , |
|||||||||||||||||||||||||||||
|
|
|
Uвых (Uоп вU Д ) аU ДUоп , |
||||||||||||||||||||||||||
|
|
U вых |
|
|
аU Д U оп |
|
|
|
|
аU Д |
|
|
. |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
U оп вU Д |
|
1 |
в |
U Д |
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U оп |
|
|
|
|
|
||||||||
Подставив выражение для U Д , получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
U вых |
|
aU п |
|
Rc |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
. |
|||||||||||
|
R |
|
|
Rc |
|
|
|
в |
|
||||||||||||||||||||
|
|
|
4 |
|
|
|
|
1 |
|
|
|
|
|
|
U п |
||||||||||||||
|
|
|
|
|
|
|
|
co |
|
|
2Rco |
(2 2 |
U оп ) |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
Анализ этого выражения показывает, что напряжение U вых становится |
|||||||||||||||||||||||||||||
линейной функцией Rc при: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
2 |
в |
|
U п |
|
|
|
|
0 , откуда |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
2 |
U оп |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
в |
4U |
оп |
|
|
U |
. |
|||
|
||||
|
п |
|||
2.Коррекция результатов измерений введениям поправок. Градуировочную характеристику. Отражающую связь
измеряемой величины x и выходного сигнала преобразователя U m можно аппроксимировать многочленом n ой степени.
x ao a1Um a2Um2 a3Um3 ... anUmn .
Значения n 1 коэффициентов получают решением n 1 уравнений, связывающих n 1 значений U m и x . Наименьшую погрешность аппроксимизации обеспечивает метод наименьших квадратов.
Устройство линеаризации зависимости Uвых f (x) должно формировать напряжение, пропорциональное величине x :
Uвых Ax , то есть
Uвых A(ao a1Um a2Um2 a3Um3 ... anUmn ) Ao A1Um A2Um2 A3Um3 ... AnUmn
где Ai Aai. (i 0,1...n) .
Вывод: Устройство линеаризации можно создать, сочетая умножители, формирующие значение U mn и сумматоры,
осуществляющие их сложение с учетом весовых коэффициентов. Для выходного напряжения линеаризатора, описываемого
выражением:
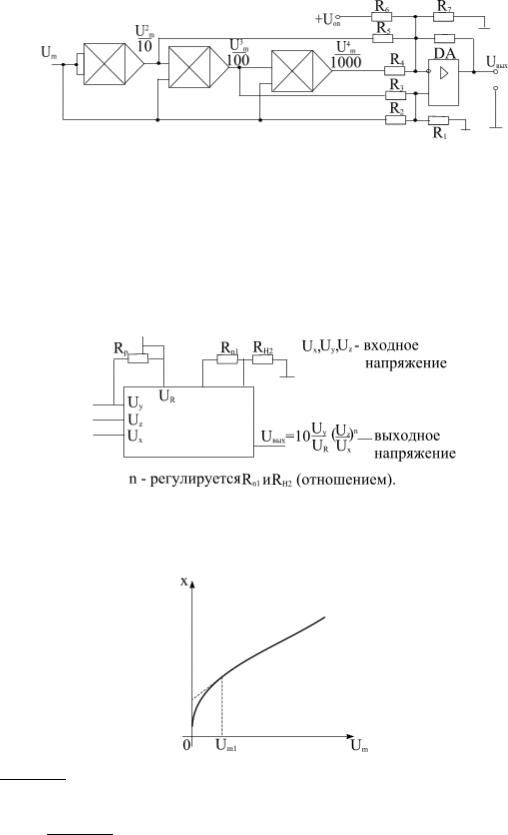
U вых Ao A1U m A2 U m2 A3U m3 A4 U m4 ,
устройство линеаризации имеет вид:
Весовые коэффициенты определяются соотношениями:
A U |
|
R |
; A |
R1 |
; A |
R |
; A |
R1 |
; A |
R |
. |
||
оп R |
|
|
|
|
|
||||||||
o |
1 |
R |
2 |
2 |
R |
3 |
R |
4 |
R |
4 |
|
||
|
6 |
|
|
|
6 |
|
3 |
|
|
|
|||
Дополнительный вход с U 0 подается к той части схемы где сумма коэффициентов передачи меньше, например, к инвертирующей части как на рисунке.
При аппроксимации градуировочных характеристик многочлен то вместо аналоговых перемножителей целесообразно использовать многофункциональные схемы, например, АД433
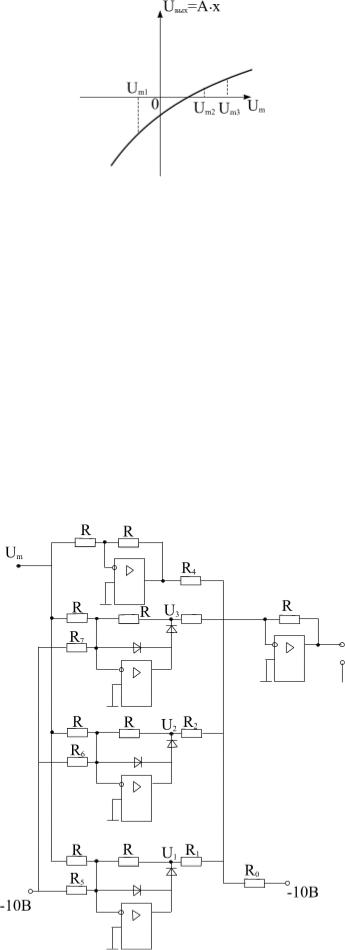
Если функция x f (U m ) имеет линейный участок, который заключен
между нелинейными участками, то применяют схему ограниченной линеаризации.
Например:
При U m U m1 - участок характеристики меняем, т.е. x ao a1U m , поэтому на
выходе сумматора Uвых Ax Ao A1Um .
При U m U m1 характеристика датчика нелинейна, то вводимые для
коррекции члены должны соответствовать функции U m1 U m , т.е.
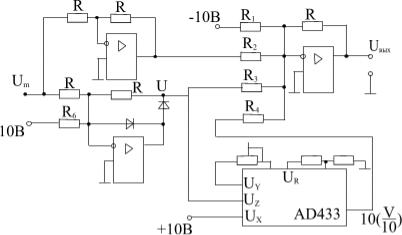
|
|
|
n |
|
|
|
|
|
|
x a |
o |
a U |
a, |
(U |
m1 |
U |
m |
)k . |
|
|
1 m |
k 1 |
k |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
В этом случае устройство линеаризации должно формировать напряжение:
|
|
|
n |
|
|
|
|
|
|
U |
вых |
Ax A A U |
A, |
(U |
m1 |
U |
m |
)k . |
|
|
o 1 m |
k 1 |
k |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Такое устройство помимо сумматоров и множительных схем, должно содержать пороговую схему на выходе которой напряжение равно нулю при U m U m1 и пропорционально разности U m1 U m при U m U m1 .
Схема такого устройства имеет вид:
На выходе устройство линеаризации формирует напряжение: |
|
|
|
|
|
|
|||||||||||||||||||||
а) при U m U m1 |
|
|
|
|
|
|
Uвых Ao A1U m , |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
б) при U |
m |
U |
m1 |
|
|
|
|
|
|
U |
вых |
A A U |
A, |
(U |
m1 |
U |
m |
) A, |
(U |
m1 |
U |
m |
) . |
||||
|
|
|
|
|
|
|
|
|
|
|
|
o 1 m |
1 |
|
|
|
n |
|
|
|
|||||||
В функции параметров элементов устройства напряжения U ВЫХ |
выражается |
||||||||||||||||||||||||||
соотношениями: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
R |
|
|
R |
U m |
R |
U |
R |
|
U |
n |
|
|
|
|
|
|
|
|
|
|
|
|
|
U ВЫХ |
|
|
10 |
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
R1 |
R2 |
R3 |
R4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
При U 0 |
для случая U m U m1 имеем U m1 |
R |
10, В |
|||
|
||||||
|
|
|
|
|
R6 |
|
А для U m |
U m1 |
U |
RS |
(U m1 U m ) |
|
|
R |
|
|
||||
|
|
|
|
|
|
|
Условие линеаризации обеспечиваются надлежащим выбором компонентов.
3. Кусочно – линейная линеаризация
При такой линеаризации кривая x f (U m ) разбивается на конечное число
i участков каждый из которых ампроксимируется двучленом первой степени: x ai biU m
Разобьем градуировачную кривую на 4 линейных участка:
U m U m3 |
x a3 b3U m |
U m 2 U m U m3 |
x a2 b2U m |
Um1 Um U m2 |
x a1 b1U m |
U m U m |
x a0 b0U m |
Вывод: Каждый раз, когда текущее значение U m переходит границу того или иного участка, значение напряжения U ВЫХ Am изменяется соответственно наклону данного участка кривой.
Это осуществляется с помощью сумматоров, пороги включения которых соответствуют различным границам U mi . Каждый сумматор
выдает напряжение U i , равное нулю или пропорциональное U mi U m в зависимости от того, превосходит или нет значение U m порог сумматора.
Устройство линеаризации имеет вид:
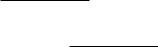
Выходное напряжение устройства имеет форму:
Uвых Ai BiU m при Umi Um Umi 1
где Ai Aai , Bi Aвi .
Зададим границы участков в соотношении со значением:
|
10R |
U m3 |
; |
10R |
U m2 |
; |
10R |
U m1 . |
|
|
|
||||||
|
R7 |
|
R6 |
|
R5 |
|||
В этом случае напряжение U вых на выходе устройства линеаризации будет равно:
|
|
|
U вых |
R |
10 |
R |
U m |
R |
U3 |
|
R |
U 2 |
R |
U1 . |
|||
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
R0 |
|
R4 |
R3 |
|
R2 |
R1 |
||||||
Значение U i на разных участках составит: |
|
|
|
|
|
||||||||||||
1. |
при U m |
U m3 |
U3 |
U 2 U1 0 , |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2. |
при U m2 |
U m U m3 |
U3 |
Um3 |
Um ;U2 |
U1 |
0 , |
|
|
||||||||
3. |
при Um1 U m U m2 |
U3 |
Um3 |
Um ;U2 |
Um2 |
Um ;U1 0 , |
|||||||||||
4. |
при U m U m1 |
U3 |
Um3 Um ;U2, Um2 Um ;U1 Um1 |
Um . |
|||||||||||||
Требуемые номиналы элементов схемы определяется из следующих соотношений:
A |
|
10R |
; B |
|
R |
; B B |
R |
. |
||||||
|
|
|
|
|||||||||||
3 |
|
Ro |
3 |
|
3 |
|
2 |
|
|
R3 |
||||
|
|
|
|
|
R4 |
|
|
|
|
|||||
B |
|
B |
R |
|
; B B |
R |
. |
|||||||
2 |
|
|
|
|||||||||||
|
1 |
|
R2 |
1 |
o |
|
R1 |
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
Цифровые методы линеаризации. |
||||||||||||||
Использование цифровых методов линеаризации требует предварительного преобразования напряжения U m в цифровую форму.
Алгоритм процесса цифровой линеаризации состоит в следующем:
1.Характеристику Uвых f (U m ) разбивают на определенное количество участков.
2.Абсциссы границ участков записывают в память машины.
3.Измеряемое напряжение сравнивается с этим набором абсцисс.
4.Определяется номер участка, т. о. , чтобы выполнялось условие
Umi Um Umi 1 .
5. Запускается программа расчета выходного напряжения по алгоритму:
U вых U выхi 1 U выхi (U m U mi ) U выхi .
U mi 1
6. Постоянные коэффициенты Ri U выхi 1 U выхi , определяющие наклон
U mi 1 U mi
прямых каждого из участков должны также храниться в памяти ЭВМ.