

Рабочие характеристики асинхронного двигателя
Это зависимость всех параметров от мощности на валу машины.
-
Характеристика тока статора
Активная составляющая тока статора зависит от момента на валу практически линейно. Т.к. в ток статора входит часть намагничивающего тока и та часть, которая расходуется на покрытие электрических потерь, т.е. зависимость близка к линейной. С другой стороны : в МПТ рабочая характеристика носит параболический характер, и в данном случае, момент на валу от Р2 – нелинейный , поэтому активная составляющая будет нелинейна. Раз речь идет о рабочей характеристике, то нас интересует только рабочий участок механической характеристики (Р2=0, и до 1,5Рном). На этом участке активная составляющая тока статора растет быстрее, чем Р2.
Интереснее
I1
(ток статора).
 Знать
как меняется cos
Знать
как меняется cos
![]() и
для этого, асинхронный двигатель
приведенный, подобен трансформатору.
Поэтому рисуем характеристику cos
и
для этого, асинхронный двигатель
приведенный, подобен трансформатору.
Поэтому рисуем характеристику cos
![]() :
коэффициент мощности
:
коэффициент мощности
![]() 0,8Рном.
Для двигателей напряджением до 10 кВ cos
0,8Рном.
Для двигателей напряджением до 10 кВ cos
![]() =0,72-0,93,
для большего напряжения, вследствии
глубокого паза, коэффициет мощности
=0,72-0,93,
для большего напряжения, вследствии
глубокого паза, коэффициет мощности
![]() 0,87.
Характеристика тока статора более
пологая, т.к. рост активная составляющая
компенсируется cos
0,87.
Характеристика тока статора более
пологая, т.к. рост активная составляющая
компенсируется cos
![]() ,
ис удаляется при увеличении нагрузки.
Ток статора всегда больше своей активной
составляющей. Для асинхронного двигателя
не возможно уменьшения тока статора
при росте Р2(т.е.
I1(P2)
монотонно
возрастает).
,
ис удаляется при увеличении нагрузки.
Ток статора всегда больше своей активной
составляющей. Для асинхронного двигателя
не возможно уменьшения тока статора
при росте Р2(т.е.
I1(P2)
монотонно
возрастает).
2) Характеристика кпд
Зависимость
![]() (Р2)
начинается из нуля, быстро растет на
начальном участке, а потом падает.
(Р2)
начинается из нуля, быстро растет на
начальном участке, а потом падает.
Рис16
-
Рост
 при увеличении Р2
для
асинхронного двигателя происходит
медленнее чем в трансформаторе
при увеличении Р2
для
асинхронного двигателя происходит
медленнее чем в трансформаторе -
Максимальное значение КПД наблюдается при мощности Р2=75-80 от номинального ( в трансформаторе же Р2=50-60).
-
Хвост более пологий. Номинальные значения КПД: от 0,7( для машин малой мощности) до 0,96( для машин мощностью МВт).
Естественно, что зависимость момента пропорционально I1а, и скорость падает также линейно. На вид характеристик существенно влияют параметры питающей сети, отсюда коэффициент мощности увеличивается, максимальный КПД смещается влево. Уменьшение частоты приводит к таким же последствиям.
Режимы работы и энергетические диаграммы.
Рис17

-
Двигательный режим.
Машина
потребляет из сети
![]() ,
, который
тратится на
который
тратится на
![]() (электрические
потери в статоре), магнитные потери в
роторе при номинальном режиме исчезающе
малы. Электромагнитная мощность та,
которая передается от статора на ротор,
и сразу начинает тратится на потери.
(электрические
потери в статоре), магнитные потери в
роторе при номинальном режиме исчезающе
малы. Электромагнитная мощность та,
которая передается от статора на ротор,
и сразу начинает тратится на потери.
2.Генераторный режим (или рекупиративного торможнения).
Существует своя рабочая область, обусловленная Sкрит в отрицательной области.
Рис19
Подобно двигательному режиму получаем с вала мощность Р2, скорость выше синхронной скорости. Так перетекает активная мощность, но чтобы асинхронный двигатель работал, необходимо существование магнитного поля. Реактивную мощность можно брать из питающей сети, но она будет потребляться из сети. Это можно избежать поставив батарею конденсаторов, но эта конструкция мало способна к работе. Принято считать, что в роторе после выбега машины есть остаточная намагниченность и ее должно хватать. Машина в параллели с питающей сети: рабочий участок ограничен от –Sкр до Sкрит и не развалит то, что реактивная мощность опять же будет потребляться. Рекупиративное торможение возможно в многоскоростных машинах, с высшей скорости на низшую, до тех пор, пока машина не перейдет на другую характеристику.
3.Режим противовключения
Если:
-
Есть активный момент на валу
-
Реверс без остановки
Рис20
Машина
потребляет с вала Рмех, которая расходуется
на покрытие механических и добавочных
потерь, здесь S>1,
 всегда есть. Но машина потребляет
мощность из сети, которая расходуется
на электрические и магнитные потери в
статоре, и все это сольется в
всегда есть. Но машина потребляет
мощность из сети, которая расходуется
на электрические и магнитные потери в
статоре, и все это сольется в
![]() ,
существенно превышают все потери и
температурный режим напряжен – режим
заведомо хуже. Это краново – металлургическая
серия, для машин с фазным роторм.
,
существенно превышают все потери и
температурный режим напряжен – режим
заведомо хуже. Это краново – металлургическая
серия, для машин с фазным роторм.
-
Режим динамического торможения
Здесь статор отключается от питающей сети, поэтому статор подключается к источнику постоянного напряжения: либо произвольные две фазы, либо подключены в звезду ( напряжение источника много меньше источника сети не превышает 10-15% от номинального). Этот режим используется в машинах с фазным ротором. В машине постоянного магнитное поле, т.е. угловая скорость равна нулю; поле создает в роторе токи, но эти токи создают постоянное магнитное поле, поэтому получим ту же самую характеристику. Постоянный ток в обмотке чисто намагничивающий ток, т.е. та точка на характеристике не будет влиять на ток статора, т.е. машина не потребляет мощность, но и не отдает ее, а та мощность, которая потребляется ушла на электрические потери.
Рис21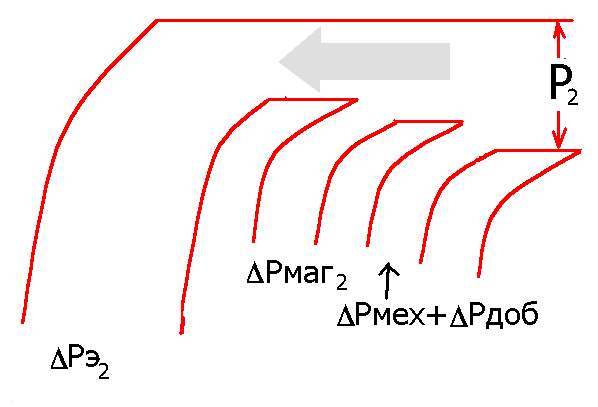
Если изменить сопротивление в роторной цепи, будет на характеристике тоже самое, если увеличитьIдин.торм.,будет то же, если бы мы имели в двигательном режиме, если увеличить напряжение угловая скорость останется той же.
Работа асинхронного двигателя при несимметрии питания.
В
статорной обмотке протекают токи прямой
и обратной последовательностей; нулевой
последовательности нет в асинхронном
двигателе (нулевой ток не заземляется;
пути для тока нет). Для прямой
последовательности: схема замещения
известна:рис22
Электромагнитное
поле, если угловая скорость направлена
против часовой стрелки, то разобьем на
поле прямой и обратной последовательностей.
Для прямой последовательности в схеме
замещения токи прямой последовательности,
положительный вращательный момент,
токи обратной последовательности
создадут отрицательный момент, будет
меняться скольжение.
Пусть ротор неподвижен, поэтому относительно поля прямой последовательности S=1; для обратной последовательности S=1. А для вращающего роста для прямой последовательности( вращаются синхронно) S=2. Но как? Выразим S2 через S1:


Пусть S=5%, тога r2 ,будет в 20 раз больше своего исходного значения, тогда токи обратной последовательности много больше тока прямой последовательности. При несимметрии питания Iдв>>Iном>>Iпусковых. Нормальная оценка должна происходить на тепловых импульсах. Машина выдерживает пуск. По худшей фазе тепловой импульс должен быть не больше, чем при пуске. Несимметрия , будет ситуация, когда магнитное поле станет пульсирующим. Это поле можно разложить на прямую и обратную последовательность( режим обрыва фаз).