

Механическая характеристика – это зависимость частоты вращения ротора от момента на валу.

Ток I2 выражаем через U1 и т.д., где U1 – фазное напряжение на эквивалентной звезде.
Выражение для механической характеристики:
 ,
С – коэффициент, учитывающий наличие
намагничивающей ветви = 1. Комплексный,
но обычно его принимают как существенный.
,
С – коэффициент, учитывающий наличие
намагничивающей ветви = 1. Комплексный,
но обычно его принимают как существенный.
Момент на валу М2 отличается от Мэм на следующие составляюшие :
-
На величину Мэм для пускового режима;
-
На величину М, создающуюся механическими и добавочными потерями в той же самой машине.
Рэм
отличается от Р2:
![]() ,
где Р2
– механическая мощность машины .
Отличаются на:
,
где Р2
– механическая мощность машины .
Отличаются на:
-
На величину электрических потерь в роторе двигателя;
-
Мощность на валу, отличающуюся то механической на момент магнитных потерь, умноженных на
 .
.
Чтобы учесть электрические потери в машине, иногда схему замещения обозначают:
Рис8
Вернемся снова к формуле момента для асинхронного двигателя.

 .
Считаем, что параметры схемы замещения
= const,
от скольжения не зависят. Расчет на
эквивалентную звезду.
.
Считаем, что параметры схемы замещения
= const,
от скольжения не зависят. Расчет на
эквивалентную звезду.
Введем
вспомогательную переменную:

Отсюда
получим:
![]()
![]() Пусть
:
Пусть
:
 -
не зависит от S
-
не зависит от S
![]()
![]() Подставив
полученные выражения в уравнение
момента, получим:
Подставив
полученные выражения в уравнение
момента, получим:
![]()

По
внешнему виду уравнение близко к
зависимости КПД от коэффициента загрузки
и в этом случае будет максимальным и
при
![]()
![]() ;
Мэм=0, при
;
Мэм=0, при
![]() ,Мэм=0
,Мэм=0
![]() соответствует
случаю отдельного холостого хода
асинхронного двигателя
соответствует
случаю отдельного холостого хода
асинхронного двигателя
![]() соответствует большому S
, в результате получим режим противовключения.
соответствует большому S
, в результате получим режим противовключения.
Продифференцируем уравнение:

Выпишем числитель:

При чисто индуктивном сопротивлении момент не возникает.
![]()
То значение S асинхронной машины, при котором момент максимален, называется критическим скольжением.

Это Sкрит зависит только от параметров схемы замещения. Значение U1 не сказывается на Sкрит, сюда входит реактивное сопротивление, которое зависит от частоты, не сказывается число полюсов. Эта формула сделана не в предположении, что параметры постоянны, но и того, что эквивалентное сопротивление питающей сети равно нулю. Но, часто встречается, что предположение не совсем справедливо. Мощность питающей сети влияет на величину эквивалентного Z(активного и реактивного сопротивления). Т.к. к питающей сети двигатель подключен статором, принимает последовательное включение статора и питающего сопротивление учитываем. в X1 u r1 , отсюда уменьшение мощности, что приводит в свою очередь к уменьшению Sкрит(а это плохо). Для двигателя нормального исполнения Sкрит: от 15% до 3% для двигателей большой мощности. Чем меньше Sкрит, тем выше КПД двигателя. Для двигателя с короткозамкнутым ротором Sкрит параметр, т.к. никакую величину нельзя поменять.
Подставим
в уравнение (*) уравнение
![]() :
:


Видим, что величина Ммакс ~U2пит фазн, с достаточной степенью точности: величина Мкрит=1/f12 . Если пренебречь r1, то из под корня появится еще одна частота. Число пар полюсов влияет на величину Ммакс. Величина Ммакс не зависит от r’2. При нормальных параметрах величина Мкрит тоже параметр. Отношение величины Ммакс к Мном называется кратностью максимального или критического момента или перегрузочной способностью асинхронного двигателя.:
 .
Для машин нормального исполнения
.
Для машин нормального исполнения
![]() .
Не привязывались к режиму двигателя,
когда выводили Sкрит
, ничего на S
не накладывали, и раз брали корень, знак
мог быть любой
, отсюда величина (Sкрит)
для генерат. И двигательных режимов
одна и та же. Наоборот с величиной Мкрит,
для генераторного режима несколько
отличается от Мкрит двигательного
режима. Отличие незначительное, т.к.
величина r1
мала.
.
Не привязывались к режиму двигателя,
когда выводили Sкрит
, ничего на S
не накладывали, и раз брали корень, знак
мог быть любой
, отсюда величина (Sкрит)
для генерат. И двигательных режимов
одна и та же. Наоборот с величиной Мкрит,
для генераторного режима несколько
отличается от Мкрит двигательного
режима. Отличие незначительное, т.к.
величина r1
мала.
Нарисуем, что у нас получилось:
Рис9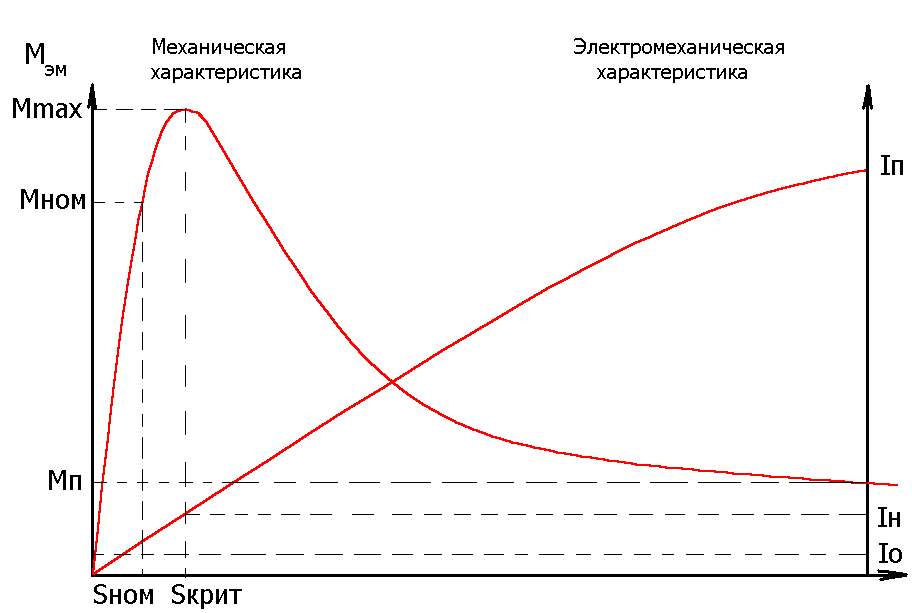
Мпуск=от 0,8ном до 2,2ном.
Sном=от 0,5(для машин большой мощности) до 4%(для машин малой мощности. Чем выше величина скольжения, тем выше КПД. Ветвь между S=0 и Sкрит называется рабочей ветвью асинхронного двигателя. Ветвь от Sкрит и дальше называется обратной или падающей ветвью.
Рис10
Почему у асинхронного двигателя получилась такая характеристика? Схема замещения отражает реальные процессы в асинхронном двигателе. Там, где U1 на схеме замещения, то мощность, которая будет выделяться, будет полезной мощностью(электромагнитная мощность). Резонанс возникает в цепи, в которой наряду с индуктивностью есть емкость. Между U1 и нашим сопротивлением – эквивалентное сопротивление источника. Цепь переменного тока, комплексы, вносят искажения и в том, что строим характеристику от S. На начальном участке рост момента – растут потери – прирост потерь давит прирост мощности.
Электромеханическая характеристика:
Для .
Ток I1
от
I2’
отличается
на величину намагничивающего тока,
тогда начнем линию не из нуля, а с Ixx.
Пусковой ток много больше номинального,
где то от 4 до8 крат по отношению к
номинальному. I0
больше,
чем для трансформатора, примерно 15% и
больше. Характерно то, что при изменении
S
от нуля до критического. Ток статора
растет также, как при изменении от крит.
До 1. Основной прирост тока двигателя
приходится на начало характеристики.
Ток при критическом скольжении каталожным
параметром не является.
.
Ток I1
от
I2’
отличается
на величину намагничивающего тока,
тогда начнем линию не из нуля, а с Ixx.
Пусковой ток много больше номинального,
где то от 4 до8 крат по отношению к
номинальному. I0
больше,
чем для трансформатора, примерно 15% и
больше. Характерно то, что при изменении
S
от нуля до критического. Ток статора
растет также, как при изменении от крит.
До 1. Основной прирост тока двигателя
приходится на начало характеристики.
Ток при критическом скольжении каталожным
параметром не является.