

Цель и содержание работы
Целью работы является изучение движения гироскопа.
Содержание работы состоит в определении угловой скорости прецессии гироскопа.
ПРИБОРЫ И ПРИНАДЛЕЖНОСТИ, НЕОБХОДИМЫЕ ДЛЯ ВЫПОЛНЕНИЯ РАБОТЫ
1. Гироскоп (рис. 14) состоит из: электромотора М с диском, штанги Ш с делениями в мм, противовеса Р2, треножника с лимбом Л и уровнем У. Мотор помещен внутри пластмассового кожуха, скрепленного со штангой; кожух и штанга могут вращаться в вертикальной плоскости относительно оси, проходящей через точку 0. Поворот в горизонтальной плоскости достигается благодаря вращению вилки ВК. Угол поворота отсчитывается по лимбу Л с точностью до 50 . Питание электромотора переменным током с напряжением 220 В производится через автотрансформатор; подводка тока к электромотору осуществляется посредством системы контактных колец
(на рис. 4 не показаны).
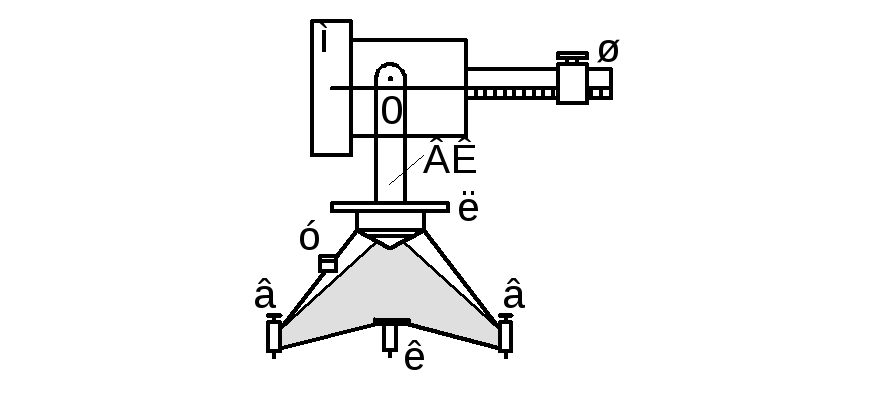
Рис. 14 Гироскоп
2. Автотрансформатор служит для постепенного увеличения напряжения, подводимого к гироскопу.
3.Секундомер служит для определения периода прецессии гироскопа, точность секундомера 0,2 с.
3. Порядок выполнения работы
Гироскопом называется быстро вращающееся твердое тело, ось вращения которого может изменять свое направление в пространстве под влиянием момента внешних сил. Гироскоп обладает рядом интересных свойств, наблюдаемых у вращающихся небесных тел, у артиллерийских снарядов, у детского волчка, у роторов турбин, устанавливаемых на судах и т.д. В современной технике гироскоп – основной элемент разнообразных устройств или приборов, широко применяемых для автоматического управления движением самолетов, судов, ракет и других устройств, для определения горизонта или географического меридиана, для измерения угловых и поступательных скоростей движущихся объектов (например, ракет) и для многих других специальных целей.
Рассмотрим гироскоп состоящий из диска, который может вращаться вокруг горизонтальной оси 00/ (рис. 15) и противовеса К . Ось гироскопа шарнирно закреплена в т.0 вертикальной подставки.
Противовес К может перемещаться вдоль оси.

Рис. 15
Уравновешенный гироскоп
Если
противовес К расположен таким образом,
что точка 0 является центром тяжести,
т.е.![]() (1) где Р1
, Р2
- силы тяжести диска и противовеса
(ось гироскопа считаем невесомой ); тогда
результирующий момент сил, действующих
на гироскоп, равен 0 (
(1) где Р1
, Р2
- силы тяжести диска и противовеса
(ось гироскопа считаем невесомой ); тогда
результирующий момент сил, действующих
на гироскоп, равен 0 (![]() ).
).
Пусть
диск вращается с угловой скоростью
![]() .
Момент импульса диска (гироскопа) будет
равен:
.
Момент импульса диска (гироскопа) будет
равен:
![]() (
(
![]() - момент инерции гироскопа).
- момент инерции гироскопа).
На основании второго закона динамики для вращательного движения имеем:
![]() ,
т.е.
,
т.е.
![]()
Так
как момент инерции диска есть величина
постоянная, то вектор угловой скорости
также постоянен. Это означает, что, при
отсутствии момента внешних сил, ось
гироскопа сохраняет свое положение в
пространстве (![]() направлен вдоль оси).
направлен вдоль оси).
Передвинем
теперь противовес К на небольшое
расстояние
![]() вправо. Равновесие нарушиться и центр
тяжести гироскопа сместиться тоже
вправо на расстояние
вправо. Равновесие нарушиться и центр
тяжести гироскопа сместиться тоже
вправо на расстояние![]() .
При этом возникает момент силы тяжести
гироскопа, который равен
.
При этом возникает момент силы тяжести
гироскопа, который равен
![]()
где
![]() - радиус-вектор, от точки опоры гироскопа
до центра тяжести,
- радиус-вектор, от точки опоры гироскопа
до центра тяжести,![]() – сила тяжести гироскопа.
– сила тяжести гироскопа.
Найдем
связь между
![]() и
и![]() .
Примем точку закрепления гироскопа за
начало координат. Тогда
.
Примем точку закрепления гироскопа за
начало координат. Тогда![]() можно найти из соотношения
можно найти из соотношения![]()
![]() -
новое расстояние от точки 0 до противовеса
К.
-
новое расстояние от точки 0 до противовеса
К.
С
учетом соотношения (1) получим:
![]()
Так как вектор
![]() направлен вдоль оси гироскопа, то вектор
М перпендикулярен оси гироскопа, т.е.
направлен вдоль оси гироскопа, то вектор
М перпендикулярен оси гироскопа, т.е.![]() .
Приращение момента импульса гироскопа
.
Приращение момента импульса гироскопа![]() .
Также направлено перпендикулярно к
.
Также направлено перпендикулярно к![]() .
Следовательно, за время вектор
момента импульса повернется на угол
(рис. 16):
.
Следовательно, за время вектор
момента импульса повернется на угол
(рис. 16):
![]()
И
вместе с ним повернется на этот же угол
![]() и ось гироскопа.
и ось гироскопа.

Рис. 16
Изменение
вектора ![]() за время
за время
![]()
Так
как момент силы тяжести действует
постоянно и направлен все время
перпендикулярно к ![]() ,
то ось гироскопа будет совершать
вращательное движение вокруг вертикальной
оси с угловой скоростью
,
то ось гироскопа будет совершать
вращательное движение вокруг вертикальной
оси с угловой скоростью
![]() (2)
(2)
Вращение
оси гироскопа с постоянной угловой
скоростью под действием постоянного
по величине момента сил называется
прецессией,
![]() а называется угловой скоростью
прецессии*. Это вращение тем медленнее,
чем быстрее вращается вокруг своей оси
гироскоп. Если в какой – то момент
времени момент сил тяжести станет
равным нулю, то ось гироскопа мгновенно
остановится, т.е. прецессионное движение
гироскопа безынерционно.
а называется угловой скоростью
прецессии*. Это вращение тем медленнее,
чем быстрее вращается вокруг своей оси
гироскоп. Если в какой – то момент
времени момент сил тяжести станет
равным нулю, то ось гироскопа мгновенно
остановится, т.е. прецессионное движение
гироскопа безынерционно.
Из
соотношения (2) следует, что если скорость
вращения диска постоянна (![]() ),
то отношение
),
то отношение![]() есть величина постоянная.
есть величина постоянная.
Цель
работы состоит в определении угловой
скорости прецессии гироскопа
![]() и проверке выполнения соотношения
и проверке выполнения соотношения
![]() (3)
(3)
где
![]() - смещение противовеса К от положения
равновесия (при выводе соотношения (3)
было учтено, что
- смещение противовеса К от положения
равновесия (при выводе соотношения (3)
было учтено, что![]() ).
).
Выполнение работы надо производить в следующем порядке:
(ВНИМАНИЕ! В процессе выполнения работы необходимо соблюдать осторожность и не прикасаться рукой к вращающемуся диску!)
Передвигая противовес по штанге Ш, добиться того, чтобы гироскоп находился в безразличном равновесии; ось его при этом установить горизонтально.
*
Так как угловая скорость прецессии
много меньше угловой скорости вращения
гироскопа
![]() , то мгновенная ось вращения, направление
которой определяется вектором
, то мгновенная ось вращения, направление
которой определяется вектором![]() ,
практически совпадает с осью гироскопа
(вдоль которой направлен вектор
,
практически совпадает с осью гироскопа
(вдоль которой направлен вектор![]() ).
).
Убедиться в том, что гироскоп может свободно вращаться вокруг горизонтальной оси.
Вставить вилку автотрансформатора в розетку, затем тумблером включить гироскоп; ручку автотрансформатора вращать до тех пор, пока стрелка не покажет 220 В; выждать 3-4 мин. пока ротор не начнет вращаться с наибольшим числом оборотов. Убедиться в отсутствии прецессии.
При работающем гироскопе отодвинуть противовес на 3 деления от точки опоры и определить
 .
.После перемещения противовеса выждать 2-3., затем включить секундомер, одновременно отметив по лимбу Л положение указателя. После того, как ось гироскопа совершит поворот на 180 , выключить секундомер. Записать в таблицу его показания. Повторить измерения еще 2 раза.
Проделать измерения п.5 еще для 5 различных положений противовеса, смещая его каждый раз на 3 мм как вправо, так и влево.
Результаты занести в таблицу.
Таблица
|
№ |
|
|
|
|
|
|
1 |
|
1. 2. 3. |
|
|
|
|
2 |
|
1. 2. 3.
|
|
|
|
|
… |
… |
… |
… |
… |
… |
|
6 |
|
1. 2. 3.
|
|
|
|