

-
Дайте определения мгновенного центра ускорений. Как определить его положение? Как определяются ускорения точек плоской фигуры с помощью мгновенного центра скоростей.
П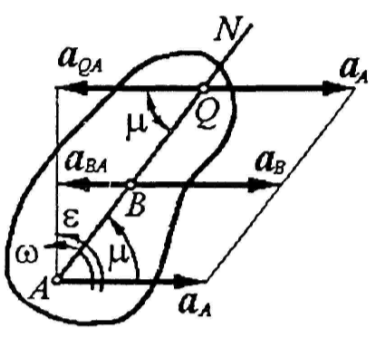 ри
непоступательном движении плоской
фигуры в её плоскости, на фигуре (или на
вязанной с ней подвижной плоскостью) в
каждый момент времени имеется точка Q,
ускорение которой равно нулю. Эта точка
называется мгновенным центром ускорений.
ри
непоступательном движении плоской
фигуры в её плоскости, на фигуре (или на
вязанной с ней подвижной плоскостью) в
каждый момент времени имеется точка Q,
ускорение которой равно нулю. Эта точка
называется мгновенным центром ускорений.
Если известно ускорение какой-либо точки А плоской фигуры, а также её угловая скорость и угловое ускорение. Тогда положение мгновенного центра ускорений определяется следующим образом:
1. Находим значение угла
![]() из формулы:
из формулы:
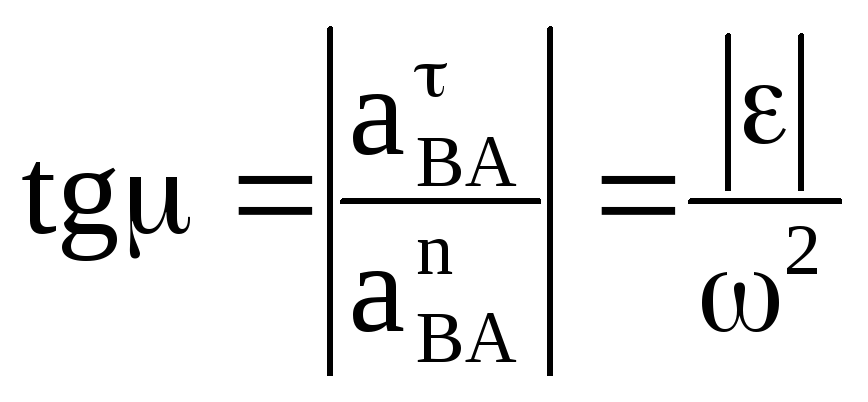 .
.
2. Из точки А, ускорение которой известно,
под углом
![]() к вектору
к вектору
![]() проводим полупрямую AN,
которая должна быть отклонена от
проводим полупрямую AN,
которая должна быть отклонена от
![]() на угол
на угол
![]() в сторону вращения фигуры, если вращение
ускоренное, и против вращения, если оно
является замедленным, то есть в строну
направления углового ускорения
в сторону вращения фигуры, если вращение
ускоренное, и против вращения, если оно
является замедленным, то есть в строну
направления углового ускорения
![]() ,
показанного на рисунку дуговой стрелкой.
,
показанного на рисунку дуговой стрелкой.
3. На полученной полупрямой AN
отложим отрезок
![]() .
Конец Q этого отрезка и
будет мгновенным центром ускорений.
.
Конец Q этого отрезка и
будет мгновенным центром ускорений.
Если точку Q выбрать за
полюс, то, поскольку
![]() ,
ускорение любой точки М плоской фигуры,
согласно формуле
,
ускорение любой точки М плоской фигуры,
согласно формуле
![]() ,
будет равно ускорению точки М во
вращательном движении этой точки вокруг
мгновенного центра ускорений, то есть:
,
будет равно ускорению точки М во
вращательном движении этой точки вокруг
мгновенного центра ускорений, то есть:
![]() .
Модуль ускорения точки М будет равен
.
Модуль ускорения точки М будет равен
![]() .
Следовательно, ускорения точек плоской
фигуры определяются в данный момент
времени так, как если бы движение было
вращательным вокруг мгновенного центра
ускорений. При этом выполняются следующие
условия:
.
Следовательно, ускорения точек плоской
фигуры определяются в данный момент
времени так, как если бы движение было
вращательным вокруг мгновенного центра
ускорений. При этом выполняются следующие
условия:
![]() .
.
-
Докажите формулу для определения скоростей точек тела, движущегося около неподвижной точки.
Пусть твердое тело имеет одну неподвижную
точку О. Свяжем с телом систему координат
Oxyz. Эта система однозначно определяет
положение рассматриваемого тела
относительно неподвижной системы
координат
![]() .
Положение произвольной точки М тела
определяется радиус-вектором
.
Положение произвольной точки М тела
определяется радиус-вектором
![]() .
Если x,y,z - координаты точки М в подвижной
системе координат, а
.
Если x,y,z - координаты точки М в подвижной
системе координат, а
![]() - единичные векторы этой системы, то
радиус-вектор может быть представлен
так:
- единичные векторы этой системы, то
радиус-вектор может быть представлен
так:
![]() (1).
(1).
В формуле (1) координаты х, у, и z постоянны,
а векторы
![]() являются функциями времени, так как
система координат Oxyz движется вместе
с телом. Учитывая, что:
являются функциями времени, так как
система координат Oxyz движется вместе
с телом. Учитывая, что:
![]() продифференцируем по времени формулу
(1), тогда:
продифференцируем по времени формулу
(1), тогда:
![]() (2).
(2).
Найдем теперь проекции скорости точки
М на оси х, у и z, для чего умножим обе
части равенства (2) скалярно на
![]() :
:
![]() ,
,
![]() ,
,
![]() (3)
(3)
Так как векторы
![]() взаимно перпендикулярны, между ними
существует следующие шесть зависимостей:
взаимно перпендикулярны, между ними
существует следующие шесть зависимостей:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Дифференцируя эти равенства по времени, найдем две группы формул:
![]() ,
,
![]() ,
,
![]()
![]() ,
,
![]() ,
,
![]() (4)
(4)
В результате формулы (3) с учетом (4) можно записать так:
![]() ,
,
![]() ,
,
![]() (5)
(5)
Если обозначить:
![]() ,
,
![]() ,
,
![]() (6) и ввести в рассмотрение такой вектор:
(6) и ввести в рассмотрение такой вектор:
![]() ,
то равенства (5) с учетом (6) можно переписать
так:
,
то равенства (5) с учетом (6) можно переписать
так:
![]() ,
,
![]() ,
,
![]() (7)
(7)
Рассмотрим теперь такое векторное произведение:

П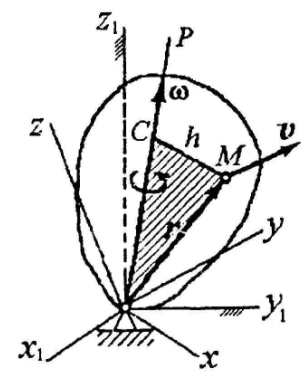 роекции
этого векторного произведения равны,
согласно формулам (7), проекциям вектора
скорости, следовательно:
роекции
этого векторного произведения равны,
согласно формулам (7), проекциям вектора
скорости, следовательно:
![]() (8). Введенный нами вектор направлен
вдоль прямой, проходящей через начало
координат, в каждой точке которой
скорости точек тела в данный момент
равны нулю, т.е. вдоль мгновенной оси
вращения. Это следует из того, что
геометрическое место точек, скорость
которых равна нулю, определяется
уравнением
(8). Введенный нами вектор направлен
вдоль прямой, проходящей через начало
координат, в каждой точке которой
скорости точек тела в данный момент
равны нулю, т.е. вдоль мгновенной оси
вращения. Это следует из того, что
геометрическое место точек, скорость
которых равна нулю, определяется
уравнением
![]() ,
что является условием коллинеарности
этих векторов.
,
что является условием коллинеарности
этих векторов.
Таким образом, скорости точек тела,
имеющего одну неподвижную точку,
распределяются так, как если бы тело
вращалось вокруг неподвижной оси,
совпадающей в данный момент с мгновенной
осью вращения. Назовем вектор
![]() вектором мгновенной угловой скорости.
Модуль скорости точки М определяется
равенством
вектором мгновенной угловой скорости.
Модуль скорости точки М определяется
равенством
где h - кратчайшее расстояние от точки
М до мгновенной оси вращения. Вектор
![]() перпендикулярен плоскости, проходящей
через точку М и мгновенную ось ОР в
сторону поворота тела.
перпендикулярен плоскости, проходящей
через точку М и мгновенную ось ОР в
сторону поворота тела.