

-
Докажите формулу распределения скоростей точек плоской фигуры.

Пусть плоская фигура движется относительно
неподвижной системы координат Оху. В
этой системе положения полюса А и
произвольной точки В определяются
соответственно радиус-векторами
![]() и
и
![]() .
Между этими векторами
.
Между этими векторами
![]() и
и
![]() и вектором
и вектором
![]() в любой момент времени имеет место
следующее соотношение:
в любой момент времени имеет место
следующее соотношение:
![]() (1).
(1).
Вектор
![]() определяет положением произвольной
точки В относительно системы
определяет положением произвольной
точки В относительно системы
![]() ,
перемещающейся вместе с полюсом А
поступательно. Подчеркнем еще раз, что
движение сечения по отношению к осям
,
перемещающейся вместе с полюсом А
поступательно. Подчеркнем еще раз, что
движение сечения по отношению к осям
![]() представляет собой вращение вокруг
полюса А.
представляет собой вращение вокруг
полюса А.
Дифференцируя обе части равенства (1)
по времени, получим:
![]() (2).
(2).
В полученном равенстве (2)
![]() ,
,
![]() .
Что же касается
.
Что же касается
![]() ,
то это - скорость, которую точка В получает
при вращении вокруг полюса А. Обозначим
эту скорость через
,
то это - скорость, которую точка В получает
при вращении вокруг полюса А. Обозначим
эту скорость через
![]() .
.
Вектор
![]() есть постоянный по модулю вектор,
изменяющийся при движении фигуры только
по направлению. Для него справедлива
формула:
есть постоянный по модулю вектор,
изменяющийся при движении фигуры только
по направлению. Для него справедлива
формула:
![]() .
Тогда формула распределения скоростей
примет вид:
.
Тогда формула распределения скоростей
примет вид:
![]() или
или
![]() .
.
Следовательно, скорость
![]() любой точки плоской фигуры в каждый
данный момент равна геометрической
сумме двух скоростей: скорости
любой точки плоской фигуры в каждый
данный момент равна геометрической
сумме двух скоростей: скорости
![]() другой, произвольно выбранной и принятой
за плюс, точки А и скорости
другой, произвольно выбранной и принятой
за плюс, точки А и скорости
![]() точки В в ее вращении вместе с плоской
фигурой вокруг этого полюса. Вектор
точки В в ее вращении вместе с плоской
фигурой вокруг этого полюса. Вектор
![]() направлен перпендикулярно АВ в сторону
вращения фигуры, а по модулю эта скорость
определяется так:
направлен перпендикулярно АВ в сторону
вращения фигуры, а по модулю эта скорость
определяется так:
![]() .
.
Таким образом, определив вращательную
скорость
![]() точки В вокруг полюса А и зная скорость
точки В вокруг полюса А и зная скорость
![]() этого полюса, мы можем найти искомую
скорость
этого полюса, мы можем найти искомую
скорость
![]() точки В как диагональ параллелограмма,
построенного на скоростях
точки В как диагональ параллелограмма,
построенного на скоростях
![]() и
и
![]() .
.
-
Сформулируйте и докажите теорему о проекциях скоростей двух точек плоской фигуры на прямую, соединяющую эти точки.
П роекции
скоростей двух точек плоской фигуры на
прямую, соединяющую эти точки, равны
между собой.
роекции
скоростей двух точек плоской фигуры на
прямую, соединяющую эти точки, равны
между собой.
Рассмотрим какие-нибудь две точки А и
В, движущиеся в своей плоскости плоской
фигуры (S). Предположим, что известны
модуль и направление скорости точки А
и направление скорости точки В. Принимая
точку А за полюс, можно записать, что:
![]() .
.
Проецируя обе части этого равенства на
линию АВ и учитывая, что вектор
![]() перпендикулярен к АВ, приходим к
результату
перпендикулярен к АВ, приходим к
результату
![]()
Доказанная теорема позволяет находить
модуль скорости
![]() точки В, если известны модуль и направление
скорости
точки В, если известны модуль и направление
скорости
![]() точки А и направление скорости
точки А и направление скорости
![]() точки В.
точки В.
-
Опишите, как определяется скорость точек плоской фигуры и её угловая скорость с помощью мгновенного центра скоростей.
П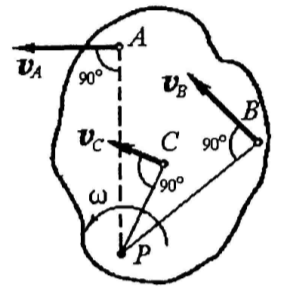 редположим
теперь, что мгновенный центр скоростей
Р известен. Найдем с помощью формулы
распределения скоростей величины
скоростей двух любых точек, например А
и В. При этом следует помнить, что скорость
полюса (т.е. мгновенного центра скоростей)
равна нулю. В этом случае:
редположим
теперь, что мгновенный центр скоростей
Р известен. Найдем с помощью формулы
распределения скоростей величины
скоростей двух любых точек, например А
и В. При этом следует помнить, что скорость
полюса (т.е. мгновенного центра скоростей)
равна нулю. В этом случае:
![]() ,
,
![]() (1).
(1).
Векторы
![]() и
и
![]() перпендикулярны отрезкам АР и ВР
соответственно и направлены в сторону
вращения плоской фигуры. Назовем отрезок,
соединяющий мгновенный центр скоростей
с данной точкой, мгновенным радиусом
вращения. Таким образом, мы видим, что
поле скоростей точек плоской фигуры в
каждый момент таково, как будто фигура
вращается вокруг неподвижного мгновенного
центра. При этом скорости точек плоской
фигуры перпендикулярны мгновенным
радиусам вращения и по величине
пропорциональны расстояниям этих точек
до мгновенного центра скоростей. Из
равенств (1) следует:
перпендикулярны отрезкам АР и ВР
соответственно и направлены в сторону
вращения плоской фигуры. Назовем отрезок,
соединяющий мгновенный центр скоростей
с данной точкой, мгновенным радиусом
вращения. Таким образом, мы видим, что
поле скоростей точек плоской фигуры в
каждый момент таково, как будто фигура
вращается вокруг неподвижного мгновенного
центра. При этом скорости точек плоской
фигуры перпендикулярны мгновенным
радиусам вращения и по величине
пропорциональны расстояниям этих точек
до мгновенного центра скоростей. Из
равенств (1) следует:
![]() (2), т.е. модуль угловой скорости плоской
фигуры в каждый момент равен отношению
величины скорости какой-либо точки
плоской фигуры к расстоянию от этой
точки до мгновенного центра скоростей.
Кроме того, так как
(2), т.е. модуль угловой скорости плоской
фигуры в каждый момент равен отношению
величины скорости какой-либо точки
плоской фигуры к расстоянию от этой
точки до мгновенного центра скоростей.
Кроме того, так как
![]() ,
а из формулы распределения скоростей
,
а из формулы распределения скоростей
![]() следует, что
следует, что
![]() ,
тo тогда
,
тo тогда
![]() (3).
(3).
Эти результаты приводят к следующим выводам:
1. Для определения положения мгновенного
центра скоростей надо знать только
направление скоростей
![]() и
и
![]() каких-нибудь двух точек А и В сечения
(S). Мгновенный центр скоростей находится
в точке пересечения перпендикуляров,
восстановленных из точек А и В к скоростям
этих точек.
каких-нибудь двух точек А и В сечения
(S). Мгновенный центр скоростей находится
в точке пересечения перпендикуляров,
восстановленных из точек А и В к скоростям
этих точек.
2. Для определения скорости любой точки
тела достаточно знать модуль и направление
какой-нибудь одной точки А тела и
направление скорости другой его точки
В. Тогда, восстановив из точек А и В
перпендикуляры к направлениям их
скоростей
![]() и
и
![]() ,
найдем положение мгновенного центра
скоростей Р и по направлению скорости
,
найдем положение мгновенного центра
скоростей Р и по направлению скорости
![]() определим направление вращения тела.
После этого, зная модуль скорости
определим направление вращения тела.
После этого, зная модуль скорости
![]() ,
найдем по формуле (2) скорость
,
найдем по формуле (2) скорость
![]() любой точки.
любой точки.
3. Модуль угловой скорости тела, как видно из формулы (2), в каждый данный момент равен отношению модуля скорости какой-нибудь точки сечения (S) к расстоянию от этой точки до мгновенного центра скоростей Р. Кроме того, модуль угловой скорости тела можно определить с помощью формулы (3).