

1. СПОСОБЫ ЗАДАНИЯ ДВИЖЕНИЯ ТОЧКИ
Движение точки в пространстве определяется тремя основными способами: векторным, координатным и естественным. Векторный способ задания движения применяется при теоретических исследованиях, координатный и естественный употребляются преимущественно при решении задач.
Векторный способ задания движения точки
Выберем некоторый неподвижный центр О и проведем из этого центра в точку М, движение которой изучаем, радиус-вектор r (рис. 2.1). При движении точки М радиус-вектор r изменяется по величине и по направлению. Каждому моменту времени t соответствует определенное значение r.
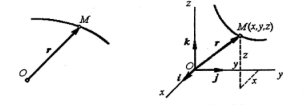
Рис. 2.1 Рис. 2.2
Следовательно, радиус-вектор r однозначно определяет положение точки М. Таким образом, чтобы определить движение точки, нужно задать ее радиус-вектор в виде однозначной и непрерывной функции времени:
r = r(t) (1)
Уравнение (1) определяет положение точки М в пространстве в произвольный момент времени t, следовательно, уравнение (1) определяет закон движения точки М. При векторном способе задании движения траекторией точки будет годограф радиус-вектора r.
Координатный способ задания движения точки
Рассмотрим прямоугольную декартову систему координат. Положение движущейся точки М определяется координатами х, у, z (рис. 2.2). Если координаты точки заданы как однозначные функции времени
x = x(t), y=y(t), z = z(t), (2)
то положение точки М в пространстве известно в каждый момент времени. Уравнения (2) определяют закон движения точки и называются уравнениями ее движения. С математической точки зрения уравнения (2) представляют собой параметрические уравнения траектории точки. Чтобы найти уравнение траектории в форме зависимостей между координатами точки М, нужно из уравнений (2) исключить время, т.е. параметр t. Решая, например, последнее уравнение из (2) относительно t, найдем t = φ (z). Подставляя это соотношение в первые два уравнения, получим:
x = x(φ(z)), y=y(φ(z)),
Плоскость:
x = x(t), y=y(t)
Прямая:
x = x(t)
Вышесказанное применимо для декартовой системы координат, для полярной:
ρ =ρ(t) φ=φ(t),
где ρ – полярный радиус, φ – угол между полярной осью и полярным радиусом
Связь между координатным и векторным способом:
r = x(t)i + y(t)j + z(t)k (7)
Равенство (7) устанавливает зависимость радиус-вектора точки М от времени и решает вопрос о переходе от координатного способа задания движения точки к векторному.
Естественный способ задания
Этот способ задания движения точки применяется в том случае, когда траектория точки, относительно выбранной системы отсчета, известна. Выберем на этой траектории какую-нибудь неподвижную точку А и примем ее за начало отсчета (рис. 2.3).
Далее, рассматривая траекторию как
криволинейную координатную ось, сообщим
ей ориентацию, т.е. положительное
направление отсчета расстояний s -
AM. Тогда положение точки М на траектории
будет однозначно определяться
криволинейной координатной s, равной
расстоянию от точки А до движущейся
точки М, измеренному вдоль дуги траектории
и взятому с соответствующим знаком. При
движении точки М криволинейная
координатам будет изменяться с течением
времени, т. е. 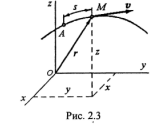 s
= s(t)
s
= s(t)
Зная уравнение (8), можно определить положение точки в каждый момент времени. Уравнение (8) называется уравнением движения, или законом движения вдоль заданной траектории.
Рассмотрим связь между естественным и координатным способами задания движения точки. Для перехода от координатного способа задания движения к естественному необходимо:
1) определить уравнение траектории точки,
2) положение точки в начальный момент времени и
3) закон движения точки по ее траектории.
Как определить уравнение траектории, нам уже известно. Для определения положения движущейся точки в начальный момент времени (/ = 0) необходимо в уравнения (2) подставить t = 0. Для определения закона движения точки по траектории воспользуемся известкой из математического анализа формулой длины дуги кривой
![]()
В теоретической механике дифференцирование по времени принято обозначать точкой над дифференцируемой функцией. Перепишем формулу (9) в этих обозначениях.
![]()
Знак плюс в формулах (9), (10) берется в том случае, когда точка М движется в сторону с положительного отсчета криволинейной координаты s. Если направление движения точки по траектории изменяется, то знак корня может быть различным для различных интервалов времени. Это изменение знака может быть при колебательном движении точки.
2. СКОРОСТЬ ТОЧКИ ПРИ ВЕКТОРНОМ СПОСОБЕ ЗАДАНИЯ ЕЁ ДВИЖЕНИЯ
Пусть в некоторый момент времени t положение точки М определяется радиус-вектором r(t), а в момент t1=t+∆t - радиус-вектором r1= r+∆r (рис. 2.4). Тогда перемещение точки М за промежуток времени ∆t=t1-t будет ММ1 = r1-r = ∆r.
Будем считать, что промежуток времени ∆t настолько мал, что с достаточной степенью точности можно предполагать перемещение точки М в положение М1, происходящим равномерно и прямолинейно. В этом случае скорость точки М можно приближенно вычислить так:
![]()
 (1)
(1)
Для того, чтобы точно вычислить скорость точки в данный момент времени, необходимо в формуле (1) перейти к пределу при стремлении промежутка времени ∆t к нулю, т.е.
![]()
Этот предел представляет собой первую векторную производную по времени от радиус-вектора точки по времени. Следовательно, скорость точки в данный момент времени есть векторная величина, равная первой производной от радиус-вектора точки по времени
![]()
3. СКОРОСТЬ ТОЧКИ ПРИ КООРДИНАТНОМ СПОСОБЕ
Рассмотрим движение точки относительно прямоугольной системы координат (рис. 2.5). В этом случае координаты точки заданы как функции времени:
x = x(t), y = y(t), z = z(t). (1)
Разложим радиус-вектор г по ортам декартовой системы координат:
r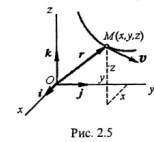 = x(t)i
+ y(t)j
+z(t)k.
(2)
= x(t)i
+ y(t)j
+z(t)k.
(2)
Зная, что вектор скорости равен первой производной от радиус-вектора, продифференцируем равенство (2) по времени. В результате получим разложение скорости по ортам i, j, к:
![]() (3)
(3)
С другой стороны разложение по ортам вектора скорости V по ортам i, j, к можно представить как:
![]() (4)
(4)
Сравнивая формулы (3) и (4):
![]()
![]()
![]() (5)
(5)
Таким образом, проекции скорости на неподвижные декартовы оси координат равны первым производным по времени от соответствующих координат движущейся точки.
Из равенства (5) следует, что проекции скорости точки на координатные оси равны скорости проекции этой точки на те же оси. Зная проекции вектора скорости точки V, найдем его модуль:
![]() или
или
![]() (6)
(6)
Направляющие косинусы:
![]()
![]()
![]()
4. СКОРОСТЬ ТОЧКИ ПРИ ЕСТЕСТВЕННОМ СПОСОБЕ ЗАДАНИЯ
Движение точки задано естественным способом. Известны траектория и закон s=s(t) (рис. 2.6). Каждой точке траектории соответствует определенный радиус-вектор r(t). Так как положение каждой точки траектории определяется дуговой координатой s, то радиус-вектор r можно рассматривать как сложную функцию времени t. Тогда:
![]()
 (1)
(1)
Теперь найдем вектор скорости V:
![]() (2)
(2)
Известно, что
![]() .
Далее, так как направление
.
Далее, так как направление
![]() ∆r=MM1
в пределе (при ∆S → 0)
совпадает с касательной к траектории
в точке M, то вектор
∆r=MM1
в пределе (при ∆S → 0)
совпадает с касательной к траектории
в точке M, то вектор
![]() есть
единичный вектор касательной к траектории
(ее орт), направленный в сторону
возрастания криволинейной координаты
S. Обозначая орт
касательной τ°, запишем формулу (2) в
виде
есть
единичный вектор касательной к траектории
(ее орт), направленный в сторону
возрастания криволинейной координаты
S. Обозначая орт
касательной τ°, запишем формулу (2) в
виде
![]() (3)
(3)
Учитывая, что
![]() ,
а τ°∙τ° =
1, получим
,
а τ°∙τ° =
1, получим
![]() т.е. проекция вектора скорости точки на
направление касательной к траектории
равна первой производной по времени от
криволинейной координаты S
no времени. Тогда формулу (3) можно записать
так:
т.е. проекция вектора скорости точки на
направление касательной к траектории
равна первой производной по времени от
криволинейной координаты S
no времени. Тогда формулу (3) можно записать
так:
![]()

Из формулы (5) следует, что модуль скорости
![]() .
Если
.
Если
![]() >
0, то точка движется в положительном
направлении отсчета расстояний и
>
0, то точка движется в положительном
направлении отсчета расстояний и
![]() .
Если же
.
Если же
![]() <
0, точка движется в отрицательном
направлении
<
0, точка движется в отрицательном
направлении
![]() . Таким образом, модуль вектора
скорости точки равен модулю ее проекции
на направление касательной:
. Таким образом, модуль вектора
скорости точки равен модулю ее проекции
на направление касательной:
![]()
При движении по окружности:
![]()
![]()
![]()
![]()
5. УСКОРЕНИЕ ТОЧКИ ПРИ ВЕКТОРНОМ СПОСОБЕ ЗАДАНИЯ
Ускорение - физическая величина, характеризующая быстроту изменения скорости точки во времени.
П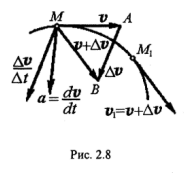 усть
точка в момент времени t
находится в положении М и имеет скорость
v(t),
а в момент t1=t
+ ∆t приходит в положение
М1 и имеет скорость v1
(рис. 2.8). Тогда за промежуток времени
∆t= t1-t
вектор скорости получает векторное
приращение ∆v
= v1-v
, которое определяет изменение вектора
скорости и по величине и по направлению.
Для определения приращения скорости
∆v перенесем
вектор v1 параллельно
своему направлению в точку М. Далее,
соединив концы векторов v
и v1, получим
∆v. Разделив вектор
∆v на соответствующий
промежуток времени ∆t,
получим вектор
усть
точка в момент времени t
находится в положении М и имеет скорость
v(t),
а в момент t1=t
+ ∆t приходит в положение
М1 и имеет скорость v1
(рис. 2.8). Тогда за промежуток времени
∆t= t1-t
вектор скорости получает векторное
приращение ∆v
= v1-v
, которое определяет изменение вектора
скорости и по величине и по направлению.
Для определения приращения скорости
∆v перенесем
вектор v1 параллельно
своему направлению в точку М. Далее,
соединив концы векторов v
и v1, получим
∆v. Разделив вектор
∆v на соответствующий
промежуток времени ∆t,
получим вектор
![]()
![]()
Таким образом, ускорение точки в данный момент времени, есть векторная величина, равная первой производной от вектора скорости или второй производной от радиус-вектора по времени.
Установим теперь положение вектора ускорения a относительно траектории. Отметим, что плоскость треугольника МАВ, образованного векторами v, v1, ∆v , при ∆t →0 будет поворачиваться вокруг вектора v, т.е. вокруг касательной к траектории в точке М, и в пределе займет определенное предельное положение. Это предельное положение плоскости МАВ называется соприкасающейся плоскостью в точке М траектории. Для плоской кривой эта плоскость есть плоскость самой кривой.
Как видно из рис. 2.8, вектор среднего ускорения аср направлен так же, как и ∆v, т.е. в сторону вогнутости траектории точки, и все время находится в плоскости треугольника МАВ.
Предел вектора аср при ∆t →0 есть вектор а, который расположен в предельном положении треугольника МВА, т.е. в соприкасающейся плоскости траектории точки М. Итак, вектор полного ускорения точки находится в соприкасающейся плоскости траектории точки и направлен в сторону вогнутости траектории.
6. УСКОРЕНИЕ ТОЧКИ ПРИ КООРДИНАТНОМ СПОСОБЕ ЗАДАНИЯ
Рассмотрим движение точки М относительно неподвижной прямоугольной декартовой системы координат (см. рис. 2.5). В этом случае ее движение задано следующим образом:
x = x(t) y = y(t) z = z(t) (1)
Разложим радиус-вектор точки по ортам осей Oxyz:
r = x(t)i + y(t)j + z(t)k (2)
Дифференцируя равенство (2) дважды по времени, получим:
![]() или
или
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Т.е. проекции вектора ускорения на неподвижные оси координат равны первым производным по времени от соответствующих проекций вектора скорости или вторым производным от соответствующих координат точки.
По этим проекциям определяем величину и направление вектора ускорения:
![]() или
или
![]()
![]()
![]()
![]()
7. ЕСТЕСТВЕННЫЙ КООРДИНАТНЫЙ ТРЕХГРАННИК
Рассмотрим пространственную кривую.
Предельное положение секущей,
проходящей через точки М и M1
кривой, когда точка M1 стремится
к точке М, называется касательной к
кривой в данной точке М. Перпендикуляр
к касательной в точке М называется
нормалью к кривой в этой точке.
Геометрическое место нормалей к данной
кривой в данной точке называется
нормальной плоскостью. Линия пересечения
нормальной и соприкасающейся
плоскостей называется главной нормалью.
Нормаль, перпендикулярная главной
нормали, называется бинормалью.
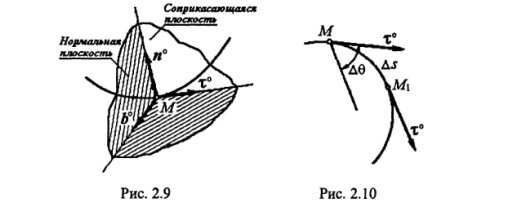
Обозначим единичные векторы: касательной через τ°, главной нормали n° и бинормали b°. Через эти векторы проходят плоскости: (τ°, n°) - соприкасающаяся, (n°, b°) - нормальная и (b°, τ°) - спрямляющая. Три взаимно перпендикулярных направления, которые определяются векторами τ°, n° и b°, образуют естественную систему координат, или так называемый естественный, или подвижный, трехгранник. Направление τ°, n° и b° определяются так же, как направление координатных осей, т.е. по правой системе, при этом единичный вектор главной нормали всегда направлен в сторону вогнутости кривой (рис. 2.9).
Проведем теперь в двух точках кривой М
и М1 единичные векторы касательных
τ° и τ°1
.Угол между этими касательными
называется углом смежности. Обозначим
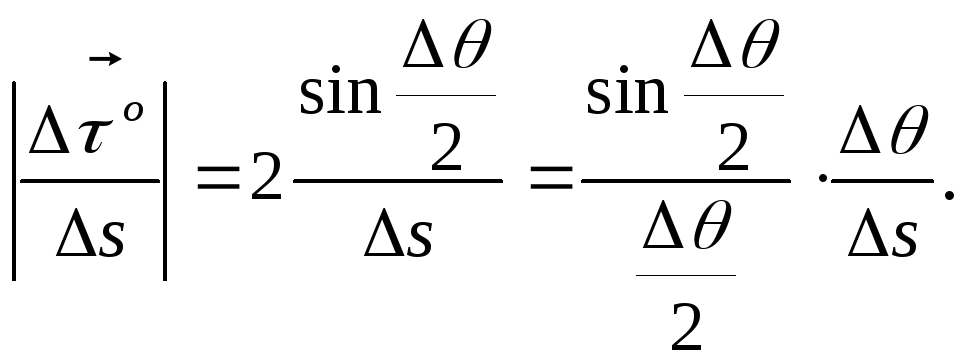
этот угол через ∆θ, а длину дуги ММ1
через ∆s (рис. 2.10). Предел отношения ∆θ
и ∆s при ∆s![]() 0,
т.е.
0,
т.е.
![]() ,
называется кривизной кривой в данной
точке M. (1)
,
называется кривизной кривой в данной
точке M. (1)
 Найдем
кривизну окружности радиуса R. Возьмем
на окружности дугу АВ = ∆s и проведем в
точках А и В касательные к окружности
(рис. 2. 11). Тогда
Найдем
кривизну окружности радиуса R. Возьмем
на окружности дугу АВ = ∆s и проведем в
точках А и В касательные к окружности
(рис. 2. 11). Тогда
![]() (2)
(2)
Отсюда следует, что окружность представляет собой кривую линию постоянной кривизны, равной обратной величине ее радиуса. Кривизна произвольной кривой вообще непостоянна. Если через три точки М, М1 и М2 кривой провести окружность, то в пределе при приближении точек М1 и М2 к М получим предельную окружность, лежащую в соприкасающейся плоскости, которая называется кругом кривизны (рис. 2.12).
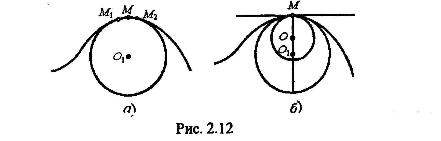 Центр
круга кривизны называется центром
кривизны, а радиус этого круга — радиусом
кривизны кривой в точке М. Величина,
обратная кривизне, называется радиусом
кривизны данной кривой в данной точке.
Центр
круга кривизны называется центром
кривизны, а радиус этого круга — радиусом
кривизны кривой в точке М. Величина,
обратная кривизне, называется радиусом
кривизны данной кривой в данной точке.
Обозначая радиус кривизны буквой ρ, получим:
![]() ,
,
![]() .
.
8. РАЗЛОЖЕНИЕ УСКОРЕНИЯ ПО ЕСТЕСТВЕННЫМ ОСЯМ
Вектор скорости точки можно представить
в виде:
![]() (1)
(1)
 В
правой части этого равенства с течением
времени изменяются оба множителя: и
проекция вектора скорости на касательную
vτ, и
направление единичного вектора τ°.
Дифференцируя равенство (1) по времени,
получим:
В
правой части этого равенства с течением
времени изменяются оба множителя: и
проекция вектора скорости на касательную
vτ, и
направление единичного вектора τ°.
Дифференцируя равенство (1) по времени,
получим:
![]() (2)
(2)
Первое слагаемое представляет собой вектор, направленный по касательной. Чтобы определить второе слагаемое, будем рассматривать вектор τ° как функцию дуговой координаты s. Тогда:
![]() (3)
(3)
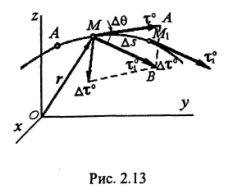
Вектор
![]() ,
входящий в равенство (3), всегда направлен
в сторону вогнутости траектории точки
и, как видно из рис. 2.13, лежит в
соприкасающейся плоскости. Действительно,
приращение вектора τ°
(см. рис. 2.13) ∆ τ°
=τ°1 - τ°
лежит в плоскости треугольника МАВ.
Если точка М1→ M,
эта плоскость, вращаясь вокруг неподвижного
вектора τ°,
стремится к предельному положению, т.е.
к соприкасающейся плоскости. Далее,
дифференцируя тождество τ°
∙τ° = 1по s, получим:
,
входящий в равенство (3), всегда направлен
в сторону вогнутости траектории точки
и, как видно из рис. 2.13, лежит в
соприкасающейся плоскости. Действительно,
приращение вектора τ°
(см. рис. 2.13) ∆ τ°
=τ°1 - τ°
лежит в плоскости треугольника МАВ.
Если точка М1→ M,
эта плоскость, вращаясь вокруг неподвижного
вектора τ°,
стремится к предельному положению, т.е.
к соприкасающейся плоскости. Далее,
дифференцируя тождество τ°
∙τ° = 1по s, получим:
![]() (4)
(4)
а это есть условие перпендикулярности векторов сомножителей.
Таким образом, рассматриваемый вектор лежит в соприкасающейся плоскости, направлен в сторону вогнутости траектории и перпендикулярен вектору τ°. Следовательно, он направлен по главной нормали к центру кривизны, т.е. по направлению орта n°. Поэтому
![]() (5). Из треугольника МАВ:
(5). Из треугольника МАВ:
![]() ,
откуда
,
откуда
 Переходя в последнем равенстве к
пределу при ∆s→0, найдем:
Переходя в последнем равенстве к
пределу при ∆s→0, найдем:
![]() ,
поэтому
,
поэтому
![]() .
Тогда окончательно:
.
Тогда окончательно:
![]()
П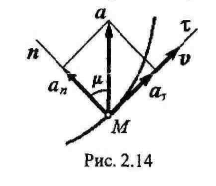 одставляя
найденное выражение вектора
одставляя
найденное выражение вектора
![]() из
(6) в равенстве (2) и учитывая, что vτ2=v22,
получим:
из
(6) в равенстве (2) и учитывая, что vτ2=v22,
получим:
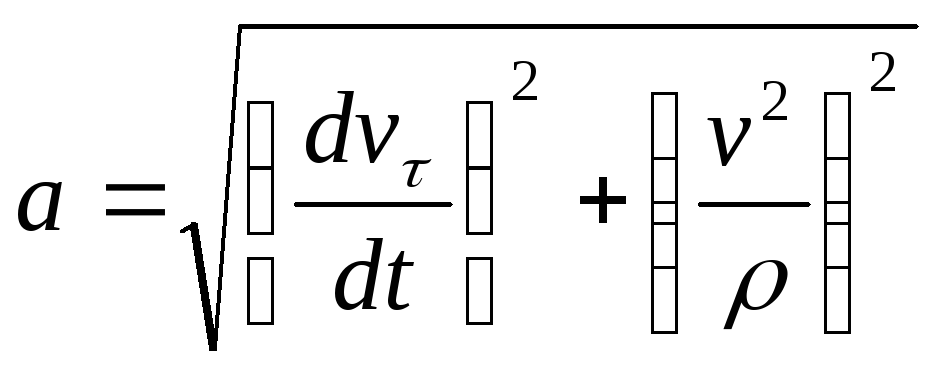
![]() Эта формула представляет собой разложение
ускорения точки М по ортам естественного
трехгранника. Составляющие вектора
ускорения по направлениям τ°
и n° соответственно
равны (рис. 2.14):
Эта формула представляет собой разложение
ускорения точки М по ортам естественного
трехгранника. Составляющие вектора
ускорения по направлениям τ°
и n° соответственно
равны (рис. 2.14):
![]()
![]()
Проекция ускорения на направление
касательной:
![]() называется
касательным или тангенциальным
ускорением. Проекция ускорения на
главную нормаль:
называется
касательным или тангенциальным
ускорением. Проекция ускорения на
главную нормаль:
![]() называется нормальным ускорением. Так
как ускорение точки лежит в соприкасающейся
плоскости, то проекция ускорения на
бинормаль равна нулю. Модуль ускорения,
на основании формул (9)-(10), будет
называется нормальным ускорением. Так
как ускорение точки лежит в соприкасающейся
плоскости, то проекция ускорения на
бинормаль равна нулю. Модуль ускорения,
на основании формул (9)-(10), будет
![]() или
или
 .
Угол между вектором a
и главной нормалью можно определить
так:
.
Угол между вектором a
и главной нормалью можно определить
так:
![]() ,
,
Касательное ускорение характеризует изменение скорости по величине, а нормальное ускорение - изменение скорости по направлению.
Касательное ускорение равно нулю при движении точки с постоянной по модулю скоростью и в моменты времени, когда скорость достигает экстремальных значений. Если Vτ и aτ одного знака, движение называется ускоренным, если же Vτ и aτ разных знаков - замедленным. При aτ =0 движение равномерное. Нормальное ускорение равно нулю при прямолинейном движении (ρ→∞), в точках перегиба криволинейной траектории и в моменты времени, когда скорость точки обращается в нуль.
В заключение отметим, что модули тангенциального и нормального ускорений также можно определить и в случае задания движения точки координатным способом.
В самом деле, вспоминая определения
модулей скалярного и векторного
произведений и представляя единичный
вектор касательной, определяемый
формулой
![]() ,
запишем:
,
запишем:
![]() ,
,
![]() ,
или
,
или
![]() Значения этих выражений определяются
непосредственно дифференцированием
закона движения точки, заданного
координатным способом.
Значения этих выражений определяются
непосредственно дифференцированием
закона движения точки, заданного
координатным способом.
10. РАВНОМЕРНОЕ И РАВНОПЕРЕМЕННОЕ КРИВОЛИНЕЙНОЕ ДВИЖЕНИЕ
Разложение ускорения по естественным осям координат удобно для анализа и классификации различных случаев движения точки.
Равномерное прямолинейное движение. Если во время движения точки ее ускорение равно нулю (а = 0), то такое движение называется равномерным и прямолинейным. Скорость точки в этом случае не изменяется ни по величине, ни по направлению.
Прямолинейное переменное движение.
Если во время движения точки ее нормальное
ускорение равно нулю, то это движение
прямолинейное. В самом деле, при аn
= 0,
![]() ,
а это
,
а это
значит, что ρ→∞, т.е. траекторией точки является прямая.
Равномерное криволинейное движение. Если во время движения точки ее тангенциальное ускорение равно нулю (aτ=0), то проекция скорости на касательную не изменяется. В этом случае точка движется равномерно по кривой и ее полное ускорение равно нормальному, т.е. а = аn .
 Рис.
2.15
Рис.
2.15
Равнопеременное криволинейное движение
Если во все время движения величина касательного ускорения точки постоянна, т.е. aτ = const, то криволинейное движение называется равнопеременным.
При этом следует помнить, что если направление aτ совпадает с направлением скорости, то движение называется равноускоренным, если же aτ направлено в сторону, противоположную скорости, то - равнозамедленным (рис. 2.15).
Рассмотрим более подробно это движение. Найдем закон изменения скорости точки и ее закон движения по криволинейной траектории s = s(t), считая, что при t=0 s = s0, а v= v0.
Здесь s0 - начальное расстояние от начала отсчета; v0 - начальная скорость точки.
Тогда из выражения
![]() ,
или
,
или
![]() ,
,
интегрируя, найдем закон изменения скорости точки
![]() .
Далее, принимая во внимание,
что
.
Далее, принимая во внимание,
что
![]() ,
и вторично
,
и вторично
интегрируя, получим закон равнопеременного криволинейного движения:
![]() .
.
Отметим, что формулы (2) и (3) отличаются от соответствующих формул для случая прямолинейного движения точки тем, что в эти формулы входит касательное ускорение.
Рассмотрим теперь, как определяется
ускорение точки при ее движении по
окружности радиусом R (рис. 2.16).
Скорость точки в случае ее движения в положительном направлении отсчета расстояний определим по полученной выше формуле:
![]() (4)
(4)
Дифференцируя это равенство по времени, получим касательное ускорение:
![]() .
.
Величина:
![]() называется угловым ускорением вращения
радиуса OM=R.
называется угловым ускорением вращения
радиуса OM=R.
Нормальное ускорение получим, принимая во внимание, что радиус кривизны окружности равен ее радиусу, т. е. ρ = R:
![]()
Модуль ускорения точки в круговом движении
![]()
Угол μ, который образует ускорение с радиусом окружности, определяется из равенства
![]()
Если V=const, то ускорение в круговом движении будет направлено по радиусу, так как тангенциальное ускорение в этом случае равно нулю.
11. ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ ТВЕРДОГО ТЕЛА
Поступательным движением твердого тела называется такое движение, при котором любая прямая, проведенная в теле во все время движения, остается параллельной своему первоначальному направлению.
При поступательном движении точки тела могут двигаться по любым траекториям. Рассмотрим движение тела относительно некоторой системы координат (рис. 2.19). Возьмем в теле точку А. Векторное уравнение движения точки А имеет вид:
rA = rA(t).
Возьмем в теле другую точку В, определяемую радиус-вектором rB. Векторное уравнение движения точки В имеет вид:
r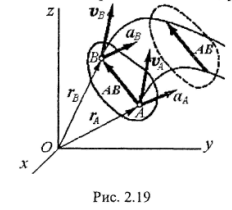 B
= rA+AB
B
= rA+AB
При движении тела радиус-векторы rA и rB изменяются с течением времени и по модулю, и по направлению. Вектор АВ имеет постоянный модуль и постоянное направление, что следует из определения абсолютно твердого тела и его поступательного движения. Как видно из уравнения (2), траекторию точки В можно получить параллельным переносом траектории точки А. Направление и величина этого переноса определяются вектором АВ.
Таким образом, при поступательном движении твердого тела все его точки описывают одинаковые траектории, которые при параллельном переносе совпадают.
Дифференцируя равенство (2) по времени, найдем:
![]()
Далее, учитывая, что
![]() ,
а вектор АВ не изменяется во времени
ни по величине, ни по направлению, и
следовательно, производная
,
а вектор АВ не изменяется во времени
ни по величине, ни по направлению, и
следовательно, производная
![]() ,
имеем
,
имеем
VB=VA
При вторичном дифференцировании:
aB=aA
Так как точки А и В были выбраны произвольно, то формулы (4) и (5) показывают, что при поступательном движении все точки твердого тела движутся с одинаковыми скоростями и ускорениями для любого момента времени.
Из этих свойств поступательного движения следует, что изучение поступательного движения тела сводится к изучению движения какой-либо одной из его точек. Следовательно, при изучении поступательного движения твердого тела можно применять все формулы, рассмотренные выше при исследовании движения одной точки.
12. ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Вращательным движением твердого тела называется такое движение, при котором все точки тела описывают концентрические окружности, центры которых лежат на одной прямой, называемой осью вращения.
Р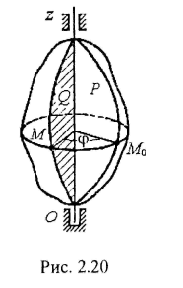 ассмотрим
вопрос о задании уравнения, или закона
вращательного движения. Пусть ось Oz
является неподвижной осью, вокруг
которой вращается тело. Проведем через
ось Oz две плоскости: подвижную Р и
неподвижную Q (рис. 2.20).
Положение вращающегося тела может
быть опре делено двугранным углом
φ между этими плоскостями. Назовем
угол φ углом поворота тела и условимся
считать положительным, если, глядя с
положительного конца оси z, угол φ виден
отложенным от неподвижной плоскости
против хода часовой стрелки. Угол
поворота тела обычно измеряют в радианах.
Иногда в практических задачах этот угол
выражают числом оборотов N тела. Так как
один оборот тела соответствует 2π радиан,
то получаем зависимость
ассмотрим
вопрос о задании уравнения, или закона
вращательного движения. Пусть ось Oz
является неподвижной осью, вокруг
которой вращается тело. Проведем через
ось Oz две плоскости: подвижную Р и
неподвижную Q (рис. 2.20).
Положение вращающегося тела может
быть опре делено двугранным углом
φ между этими плоскостями. Назовем
угол φ углом поворота тела и условимся
считать положительным, если, глядя с
положительного конца оси z, угол φ виден
отложенным от неподвижной плоскости
против хода часовой стрелки. Угол
поворота тела обычно измеряют в радианах.
Иногда в практических задачах этот угол
выражают числом оборотов N тела. Так как
один оборот тела соответствует 2π радиан,
то получаем зависимость
φ =2π N (1)
При вращении тела угол поворота изменяется с течением времени, т.е.
φ = φ (t) (2)
Равенство (2) называется уравнением, или законом вращательного движения твердого тела вокруг неподвижной оси.
Рассмотрим теперь основные кинематические величины, характеризующие вращательное движение тела. Этими величинами являются угловая скорость тела ω и угловое ускорение ε.
Угловой скоростью тела называется физическая величина, характеризующая быстроту изменения угла поворота φ тела во времени, т.е.:
![]() (3)
(3)
В самом деле, пусть за промежуток времени ∆t угол поворота φ получил приращение ∆φ. Тогда средняя угловая скорость определится равенством:
![]() (4)
(4)
Предел этого отношения при ∆t→0 называют угловой скоростью тела в данный момент времени
![]() (5)
(5)
Мы вновь пришли к равенству (3). Итак, угловая скорость тела равна первой производной по времени от угла поворота тела. Значение угловой скорости ω для данного момента времени может быть положительным или отрицательным в зависимости от того, возрастает или убывает угол поворота тела.
Если ω > 0, то тело в данный момент времени вращается в положительном направлении отсчета угла поворота φ, т. е. против движения часовой стрелки.
Размерность угловой скорости [ω]=с-1. В технике угловую скорость характеризуют числом оборотов в минуту и обозначают буквой n. Замечая, что n об/мин соответствует n/60 об/с и что 1 оборот соответствует 2π радианам, получим:
![]() c-1 (6)
c-1 (6)
Эту меру быстроты изменения угловой скорости можно получить как предел приращения угловой скорости к приращению времени:
![]() (7)
(7)
Эту меру быстроты изменения угловой скорости можно получить как предел приращения угловой скорости к приращению времени:
![]() (8)
(8)
Таким образом, угловое ускорение тела в данный момент времени равно первой производной по времени от угловой скорости или второй производной от угла поворота.
Размерность углового ускорения [ε] = с-2. Если знаки угловой скорости и углового ускорения одинаковы, то вращение тела в данный момент ускоренное, если же знаки ω и ε различны, вращение замедленное.
13. РАВНОМЕРНОЕ И РАВНОПЕРЕМЕННОЕ ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ
Вращение тела называют равномерным, если угловая скорость тела постоянна, т.е. ω =const.
В этом случае:
![]()
![]()
![]() (1)
(1)
Произвольную постоянную С определяем
из начального условия
![]() .
В результате находим С = φ0. Тогда:
.
В результате находим С = φ0. Тогда:
φ = φ0 + ωt (2)
Равенство (2) называется законом равномерного вращательного движения твердого тела. При φ0=0 это равенство упрощается.
Равнопеременным вращением называется такое вращательное движение тела, при котором его угловое ускорение постоянно, т.е. ε = const ≠ 0. В этом случае:
![]() ,
,
![]() ,
,
![]() (3)
(3)
Из начального условия
![]() находим С1 = ω0. Тогда ω = ω0
+ εt
(4)
находим С1 = ω0. Тогда ω = ω0
+ εt
(4)
Равенство (4) называется законом изменения угловой скорости при равнопеременном вращательном движении тела. Далее
![]() ,
,
![]() ,
,
![]() (5)
(5)
Из начального условия
![]() находим
С2 = φ0.
находим
С2 = φ0.
Тогда окончательно
![]() (6)
(6)
Равенство (6) называется законом равнопеременного вращательного движения твердого тела. Легко заметить аналогию между полученными формулами (2) и (6) и формулами равномерного и равнопеременного движения точки. Соответствующие формулы совпадают с точностью до обозначений.
14. СКОРОСТЬ ТОЧЕК, ВРАЩАЮЩИХСЯ ВОКРУГ НЕПОДВИЖНОЙ ОСИ

Пусть вращение тела вокруг неподвижной оси задано уравнением
![]() (1)
(1)
Найдем распределение скоростей точек тела при его вращении. Воспользуемся при этом естест венным способом задания движения точки. Рассмотрим движение какой-нибудь точки М тела. При вращении тела точка М будет описывать окружность, радиус которой обозначим R (рис. 2.21).
Составим уравнение движения точки М по ее траектории. За начало отсчета примем начальное положение М0, а за положительное направление дуги s - направление отсчета угла поворота φ. Тогда уравнением движения точки М по ее траектории будет
S = M0M = Rφ (2)
а следовательно, проекция скорости точки М на направление касательной определится следующим образом:
![]() (3) или
(3) или
![]() (4)
(4)
Эту скорость точки М, в отличие от угловой скорости тела, часто называют линейной скоростью. Таким образом, линейная скорость какой-либо точки вращающегося твердого тела равна произведению угловой скорости тела на расстояние от этой точки до оси вращения.
Вектор v скорости точки М направлен по касательной к окружности, которую описывает точка М, т.е. перпендикулярен к радиусу этой окружности. Модуль v вектора скорости v равен
.
![]() (5)
(5)
Так как угловая скорость ω является кинематической характеристикой всего тела в целом, то из формулы (5) следует, что скорости точек тела пропорциональны расстояниям этих точек до оси вращения.
15. УСКОРЕНИЕ ТОЧЕК, ВРАЩАЮЩИХСЯ ВОКРУГ НЕПОДВИЖНОЙ ОСИ
Ускорение точки М находим, определив сначала касательное и нормальное ускорения:
![]()
![]() (6)
(6)
Тогда модуль полного ускорения точки М:
![]() (7)
(7)
Угол, образованный вектором ускорения точки М с радиусом описываемой точкой окружности, определяется так:
![]() (8)
(8)
Из формулы (8) следует, что ускорения точек вращающегося тела образуют в данный момент один и тот же угол α с радиусами описываемых ими окружностей. В частном случае равномерного вращения ε=0, поэтому α=0 и, следовательно, полное ускорение по модулю равно нормальному и направлено к оси вращения.
16. векторная формула для скорости точек тела, вращающихся вокруг неподвижной оси
Рассмотрим твердое тело, вращающееся
вокруг неподвижной оси Oz с угловой
скоростью
![]() .
Определим скорость произвольной точки
М этого тела. Введем прямоугольную
систему координат с началом на оси
вращения и неизменно связанную с телом
(рис. 2.22). В этом случае
.
Определим скорость произвольной точки
М этого тела. Введем прямоугольную
систему координат с началом на оси
вращения и неизменно связанную с телом
(рис. 2.22). В этом случае
r = x(t)i + y(t)j + z(t)k (1)
Здесь следует заметить, что в разложении (1) х, у, z и вектор к постоянны, т.е. не зависят от времени, а i и j зависят от времени, так как вращаются вместе с телом.
Тогда для скорости точки М имеем
![]() (2)
(2)
Производные от единичных векторов,
входящие в формулу (2), есть скорости
концов этих векторов. Например, при φ >
0 вектор скорости конца i направлен
параллельно j в
положительном направлении оси Оу, а
вектор скорости конца j
направлен параллельно i в отрицательном
направлении оси Ох. Модуль каждой из
этих скоростей равен
![]() .
.
Тогда
![]() ,
,
![]()
Далее, учитывая, что
![]() ,
а
,
а
![]() ,
получим
,
получим
![]() ,
а
,
а
![]() (3)
(3)
Подставляя формулы (3) в равенство (2) и
используя то, что
![]() ,
найдем:
,
найдем:
![]() (4)
(4)
Назовем вектор
![]() вектором угловой скорости ω,
тогда
вектором угловой скорости ω,
тогда
![]() .
(5)
.
(5)
Как видно из равенства (5), вектор угловой скорости тела направлен вдоль оси вращения так, чтобы наблюдатель, смотрящий с его конца, видел вращение тела против хода часовой стрелки.
Вектор со можно расположить в любом месте оси вращения, т.е. СО - скользящий максиальный вектор.
Перепишем теперь формулу (4) с учетом (5), тогда
![]() (6)
(6)
Вектор скорости любой точки тела, вращающегося вокруг неподвижной оси, равен векторному произведению вектора угловой скорости тела на радиус-вектор этой точки, проведенный из произвольного центра, взятого на оси вращения.
Формула (6) называется формулой Эйлера.
Примечание. Так как
![]() ,
то из (6) следует, что если
,
то из (6) следует, что если
вектор r изменяется со временем только по направлению, то
![]() ,
(а)
,
(а)
где ω - угловая скорость поворота вектора r. Формула (а) определяет правило дифференцирования вектора, постоянного по модулю. Аналогично из равенств (3) и (5) получаем:
![]()
![]()
![]() (б)
(б)
Модуль скорости точки М:
![]() (7),
(7),
что совпадает с формулой (5) по времени, получим вектор углового ускорения:
![]() (8)
(8)
Вектор углового ускорения ε, так же как и вектор угловой скорости ω, лежит на оси вращения. При этом в случае ускоренного вращения вектор ε направлен в ту же сторону, что и вектор ω, в случае же замедленного вращения вектор ε направлен в сторону, противоположную вектору ω.
Для определения проекций скорости точки М на оси выбранной подвижной системы координат представим формулу (6) в виде определителя третьего порядка:
 .
(9)
.
(9)
Отсюда:
![]() ,
,
![]() ,
,
![]() .
(10)
.
(10)
Равенства (10) определяют проекции скорости любой точки М вращающегося тела на выбранные оси координат.
Выведем теперь векторную формулу для определения ускорения произвольной точки М тела, вращающегося вокруг неподвижной оси. Для этого продифференцируем равенство (6) по времени. В результате получим
![]() (11) , или
(11) , или
![]() (12)
(12)
Из рис. 2.23 видно, что вектор
![]() направлен по касательной к траектории,
а вектор
направлен по касательной к траектории,
а вектор
![]() - по радиусу МО1, т.е. по главной
нормали к траектории. Следовательно,
- по радиусу МО1, т.е. по главной
нормали к траектории. Следовательно,
![]() ,
,
![]() (13)
(13)
Из формул (13) находим:
![]()
![]()

Т.е. приходим к известным ранее равенствам. Далее, если взять систему осей координат Oxyz, в которой ось z направлена вдоль оси вращения, и представить an в виде an=-ω2∙O1M, то, согласно (12) и (13)
 (14)
(14)
Отсюда получаем:
![]() ,
,
![]() ,
,
![]() .
(15)
.
(15)
Равенства (15) дают проекции ускорения любой точки М(х, у, z) вращающегося тела на выбранные оси координат.