


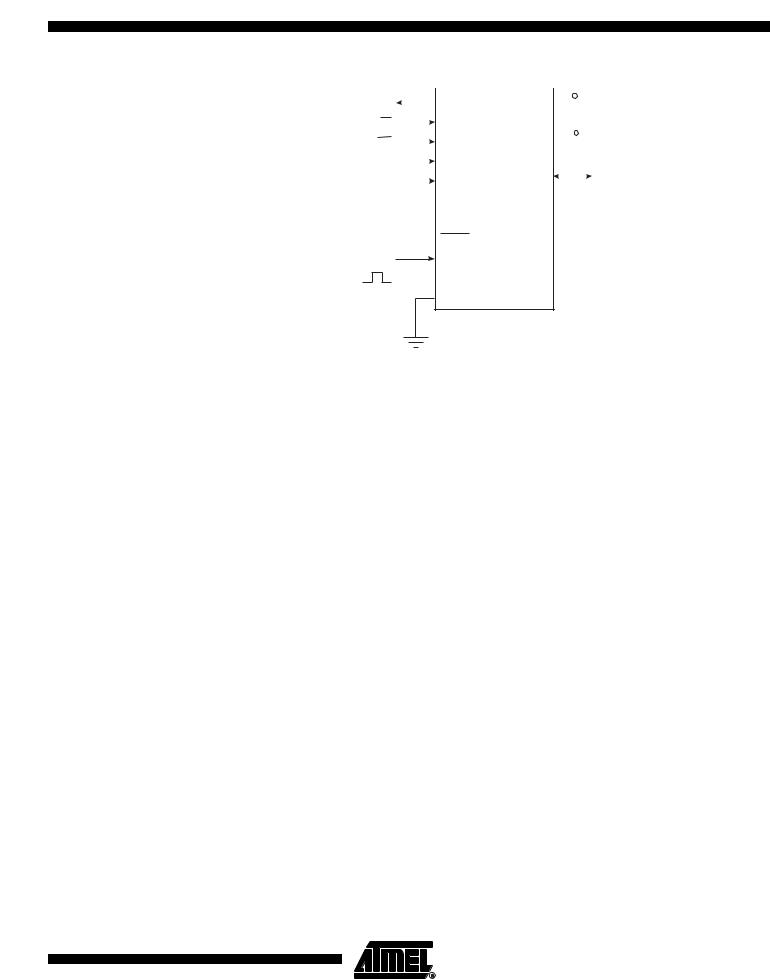
Figure 95. Parallel Programming(1)
|
|
|
|
|
|
|
|
|
|
|
+5V |
||
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RDY/BSY |
|
|
|
|
PD1 |
VCC |
|
|
|
|
|
||
|
OE |
|
|
|
|
PD2 |
|
|
+5V |
||||
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
WR |
|
|
|
PD3 |
AVCC |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
||||||||
|
BS1 |
|
|
|
|
PD4 |
|
|
|
DATA |
|||
|
|
|
|
PB7:0 |
|
|
|
||||||
|
|
|
|
|
|||||||||
|
XA0 |
|
|
|
|
PD5 |
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||||
XA1  PD6
PD6
PAGEL  PD7
PD7
+12 V  RESET
RESET
BS2 PC6
 XTAL1
XTAL1
GND
Note: 1. Unused Pins should be left floating.
Table 37. Pin Name Mapping
Signal Name in |
|
|
|
|
|
||||||
Programming Mode |
Pin Name |
I/O |
Function |
||||||||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
0: Device is busy programming, 1: Device is |
|||
RDY/BSY |
PD1 |
O |
|||||||||
ready for new command. |
|||||||||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
PD2 |
I |
Output Enable (Active low). |
|||
|
OE |
|
|
||||||||
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
PD3 |
I |
Write Pulse (Active low). |
|||
|
WR |
|
|||||||||
|
|
|
|
||||||||
BS1 |
PD4 |
I |
Byte Select 1. |
||||||||
|
|
|
|
||||||||
XA0 |
PD5 |
I |
XTAL Action Bit 0 |
||||||||
|
|
|
|
||||||||
XA1 |
PD6 |
I |
XTAL Action Bit 1 |
||||||||
|
|
|
|
||||||||
PAGEL |
PD7 |
I |
Program Memory and EEPROM data Page Load. |
||||||||
|
|
|
|
||||||||
BS2 |
PC6 |
I |
Byte Select 2. |
||||||||
|
|
|
|
||||||||
DATA |
PB7-0 |
I/O |
Bi-directional Data bus (Output when |
|
|
||||||
OE is low). |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Table 38. BS2 and BS1 Encoding
|
|
Flash / |
Flash Data |
|
|
|
|
EEPROM |
Loading / |
Fuse |
Reading Fuse |
BS2 |
BS1 |
Address |
Reading |
Programming |
and Lock Bits |
|
|
|
|
|
|
0 |
0 |
Low Byte |
Low Byte |
Low Byte |
Fuse Low Byte |
|
|
|
|
|
|
0 |
1 |
High Byte |
High Byte |
High Byte |
Lockbits |
|
|
|
|
|
|
1 |
0 |
Extended High |
Reserved |
Extended Byte |
Extended Fuse |
|
|
Byte |
|
|
Byte |
|
|
|
|
|
|
1 |
1 |
Reserved |
Reserved |
Reserved |
Fuse High Byte |
|
|
|
|
|
|
237
7707A–AVR–01/07


Table 43. No. of Bytes in a Page and No. of Pages in the EEPROM
|
|
|
No. of |
|
|
EEPROM Size |
Page Size |
PCWORD |
Pages |
PCPAGE |
EEAMSB |
|
|
|
|
|
|
512 bytes |
8 bytes |
EEA[2:0] |
64 |
EEA[8:3] |
8 |
|
|
|
|
|
|
239
7707A–AVR–01/07