

 ATtiny25/45/85 Auto
ATtiny25/45/85 Auto
Table 22-10. Serial Programming Instruction Set
|
|
|
|
Instruction Format |
|
|
||
|
|
|
|
|
|
|||
Instruction |
Byte 1 |
Byte 2 |
Byte 3 |
Byte4 |
Operation |
|||
|
|
|
|
|
|
|
|
|
|
|
|
0101 |
0000 |
xxxx |
oooo |
Read Fuse bits. “0” = |
|
Read Fuse bits |
0000 |
0000 |
xxxx |
oooo |
programmed, “1” = |
|||
|
|
|
|
unprogrammed. See Table |
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
22-5 on page 141 for details. |
|
|
|
|
|
|
|
|
|
|
|
|
|
0101 |
0000 |
xxxx |
oooo |
Read Fuse High bits. “0” = |
|
Read Fuse High bits |
1000 |
1000 |
xxxx |
oooo |
pro-grammed, “1” = |
|||
|
|
|
|
unprogrammed. See Table |
||||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
22-4 on page 141 for details. |
|
|
|
|
|
|
|
|
|
|
|
|
|
0101 |
0000 |
xxxx |
oooo |
Read Extended Fuse bits. “0” |
|
Read Extended Fuse |
0000 |
1000 |
xxxx |
oooo |
= pro-grammed, “1” = |
|||
Bits |
|
|
|
|
unprogrammed. See Table |
|||
|
|
|
|
|
|
|
22-3 on page 140 for details. |
|
|
|
|
|
|
|
|
|
|
Read Calibration Byte |
0011 |
000x |
0000 |
oooo |
Read Calibration Byte |
|||
1000 |
xxxx |
0000 |
oooo |
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
1111 |
0000 |
xxxx |
xxxx |
If o = “1”, a programming |
|
|
|
|
0000 |
0000 |
xxxx |
xxxo |
operation is still busy. Wait |
|
Poll RDY/BSY |
|
|
|
|
|
until this bit returns to “0” |
||
|
|
|
|
|
|
|
before applying another |
|
|
|
|
|
|
|
|
command. |
|
|
|
|
|
|
|
|
|
|
Note: a = address high bits, b = address low bits, H = 0 - Low byte, 1 - High Byte, o = data out, i = data in, x = don’t care
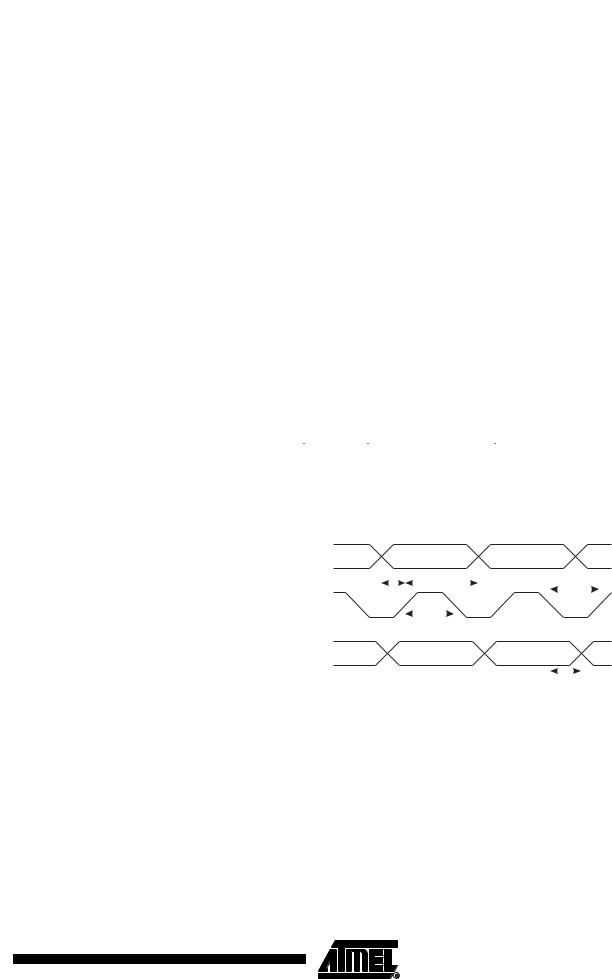
22.6.2Serial Programming Characteristics
Figure 22-3. Serial Programming Timing
|
MOSI |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tOVSH |
|
|
|
|
|
|
|
|
|
tSHOX |
|
tSLSH |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
SCK |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tSHSL |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
MISO |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tSLIV |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Table 22-11. Serial Programming Characteristics, TA = -40°C to 125°C, VCC = 2.7 - 5.5V |
||||||||||||||||||||
|
(Unless Otherwise Noted) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Symbol |
Parameter |
|
|
|
|
Min |
|
|
Typ |
Max |
Units |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1/tCLCL |
Oscillator Frequency (ATtiny25/45/85V) |
|
|
|
0 |
|
|
|
|
4 |
MHz |
|||||||||
tCLCL |
Oscillator Period (ATtiny25/45/85V) |
|
|
|
250 |
|
|
|
|
|
ns |
|||||||||
1/tCLCL |
Oscillator Frequency (ATtiny25/45/85L, VCC = 2.7 - |
0 |
|
|
|
|
10 |
MHz |
||||||||||||
5.5V) |
|
|
|
|
|
|
|
|||||||||||||
tCLCL |
Oscillator Period (ATtiny25/45/85L, VCC = 2.7 - |
100 |
|
|
|
|
|
ns |
||||||||||||
5.5V) |
|
|
|
|
|
|
|
|
||||||||||||
147
7598C–AVR–09/06