

 ATtiny25/45/85 Auto
ATtiny25/45/85 Auto
Table 22-7. |
No. of Words in a Page and No. of Pages in the EEPROM |
|
||||
|
EEPROM |
|
|
|
|
|
Device |
Size |
Page Size |
PCWORD |
No. of Pages |
PCPAGE |
EEAMSB |
|
|
|
|
|
|
|
ATtiny25 |
128 bytes |
4 bytes |
EEA[1:0] |
32 |
EEA[6:2] |
6 |
|
|
|
|
|
|
|
ATtiny45 |
256 bytes |
4 bytes |
EEA[1:0] |
64 |
EEA[7:2] |
7 |
|
|
|
|
|
|
|
ATtiny85 |
512 bytes |
4 bytes |
EEA[1:0] |
128 |
EEA[8:2] |
8 |
|
|
|
|
|
|
|
22.6Serial Downloading
Both the Flash and EEPROM memory arrays can be programmed using the serial SPI bus while RESET is pulled to GND. The serial interface consists of pins SCK, MOSI (input) and MISO (output). After RESET is set low, the Programming Enable instruction needs to be executed first before program/erase operations can be executed. NOTE, in Table 22-8 on page 143, the pin mapping for SPI programming is listed. Not all parts use the SPI pins dedicated for the internal SPI interface.
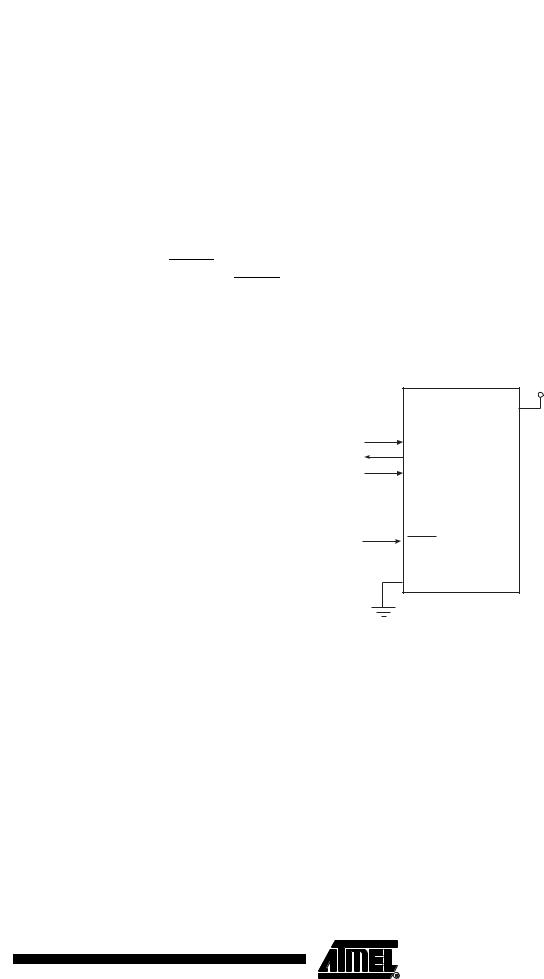
Figure 22-1. Serial Programming and Verify(1)
+1.8 - 5.5V
VCC
MOSI
MISO
SCK
RESET
GND
Notes: 1. If the device is clocked by the internal Oscillator, it is no need to connect a clock source to the CLKI pin.
Table 22-8. Pin Mapping Serial Programming
Symbol |
Pins |
I/O |
Description |
|
|
|
|
MOSI |
PB0 |
I |
Serial Data in |
|
|
|
|
MISO |
PB1 |
O |
Serial Data out |
|
|
|
|
SCK |
PB2 |
I |
Serial Clock |
|
|
|
|
When programming the EEPROM, an auto-erase cycle is built into the self-timed programming operation (in the Serial mode ONLY) and there is no need to first execute the Chip Erase instruction. The Chip Erase operation turns the content of every memory location in both the Program and EEPROM arrays into 0xFF.
Depending on CKSEL Fuses, a valid clock must be present. The minimum low and high periods for the serial clock (SCK) input are defined as follows:
143
7598C–AVR–09/06

Low: > 2 CPU clock cycles for fck < 12 MHz, 3 CPU clock cycles for fck >= 12 MHz
High: > 2 CPU clock cycles for fck < 12 MHz, 3 CPU clock cycles for fck >= 12 MHz
22.6.1Serial Programming Algorithm
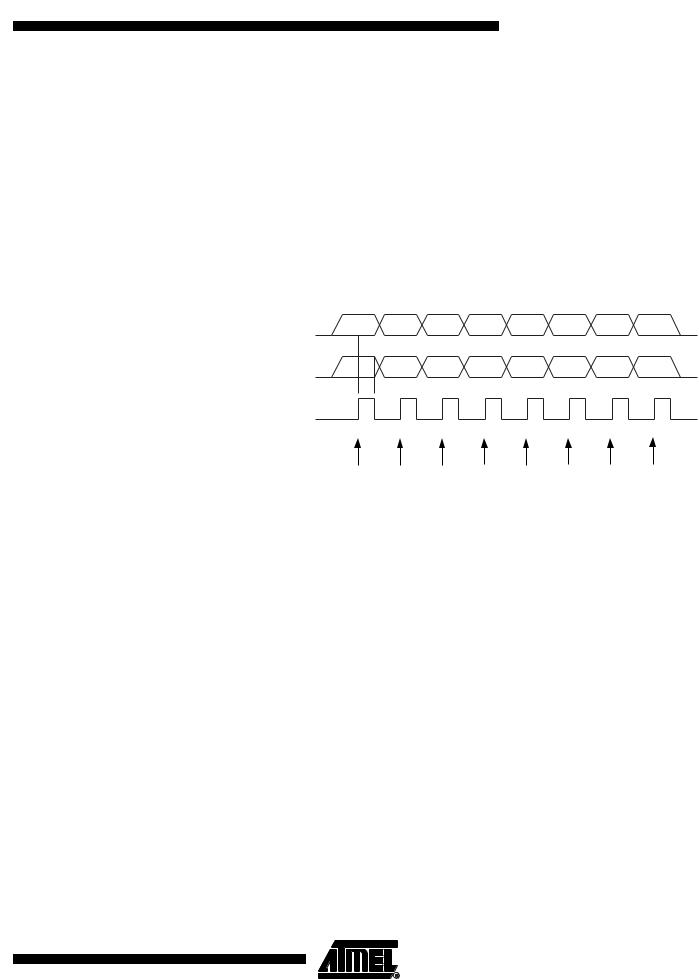
When writing serial data to the ATtiny25/45/85, data is clocked on the rising edge of SCK.
When reading data from the ATtiny25/45/85, data is clocked on the falling edge of SCK. See Figure 22-2 and Figure 22-3 for timing details.
To program and verify the ATtiny25/45/85 in the Serial Programming mode, the following sequence is recommended (see four byte instruction formats in Table 22-10):
1.Power-up sequence:
Apply power between VCC and GND while RESET and SCK are set to “0”. In some systems, the programmer can not guarantee that SCK is held low during power-up. In this case, RESET must be given a positive pulse of at least two CPU clock cycles duration after SCK has been set to “0”.
2.Wait for at least 20 ms and enable serial programming by sending the Programming Enable serial instruction to pin MOSI.
3.The serial programming instructions will not work if the communication is out of synchronization. When in sync. the second byte (0x53), will echo back when issuing the third byte of the Programming Enable instruction. Whether the echo is correct or not, all four bytes of the instruction must be transmitted. If the 0x53 did not echo back, give RESET a positive pulse and issue a new Programming Enable command.
4.The Flash is programmed one page at a time. The memory page is loaded one byte at a time by supplying the 5 LSB of the address and data together with the Load Program memory Page instruction. To ensure correct loading of the page, the data low byte must be loaded before data high byte is applied for a given address. The Program memory Page is stored by loading the Write Program memory Page instruction with the 6 MSB
of the address. If polling (RDY/BSY) is not used, the user must wait at least tWD_FLASH before issuing the next page. (See Table 22-9.) Accessing the serial programming interface before the Flash write operation completes can result in incorrect programming.
5.A: The EEPROM array is programmed one byte at a time by supplying the address and data together with the appropriate Write instruction. An EEPROM memory location is first automatically erased before new data is written. If polling (RDY/BSY) is not used,
the user must wait at least tWD_EEPROM before issuing the next byte. (See Table 22-9.) In a chip erased device, no 0xFFs in the data file(s) need to be programmed.
B: The EEPROM array is programmed one page at a time. The Memory page is loaded one byte at a time by supplying the 2 LSB of the address and data together with the Load EEPROM Memory Page instruction. The EEPROM Memory Page is stored by loading the Write EEPROM Memory Page Instruction with the 6 MSB of the address. When using EEPROM page access only byte locations loaded with the Load EEPROM Memory Page instruction is altered. The remaining locations remain unchanged. If poll-
ing (RDY/BSY) is not used, the used must wait at least tWD_EEPROM before issuing the next page (See Table 22-7). In a chip erased device, no 0xFF in the data file(s) need to
be programmed.
6.Any memory location can be verified by using the Read instruction which returns the content at the selected address at serial output MISO.
7.At the end of the programming session, RESET can be set high to commence normal operation.
144 ATtiny25/45/85 Auto 
7598C–AVR–09/06
ATtiny25/45/85 Auto
8.Power-off sequence (if needed): Set RESET to “1”.
Turn VCC power off.
Table 22-9. |
Minimum Wait Delay Before Writing the Next Flash or EEPROM Location |
|
Symbol |
|
Minimum Wait Delay |
|
|
|
tWD_FLASH |
|
4.5 ms |
tWD_EEPROM |
|
4.0 ms |
tWD_ERASE |
|
4.0 ms |
tWD_FUSE |
|
4.5 ms |
Figure 22-2. Serial Programming Waveforms
SERIAL DATA INPUT |
MSB |
LSB |
(MOSI) |
|
|
SERIAL DATA OUTPUT |
MSB |
LSB |
(MISO) |
|
|
SERIAL CLOCK INPUT |
|
|
(SCK) |
|
|
SAMPLE |
|
|
145
7598C–AVR–09/06

Table 22-10. Serial Programming Instruction Set
|
|
Instruction Format |
|
|
||
|
|
|
|
|
|
|
Instruction |
Byte 1 |
Byte 2 |
Byte 3 |
Byte4 |
Operation |
|
|
|
|
|
|
|
|
Programming Enable |
1010 |
0101 |
xxxx |
xxxx |
Enable Serial Programming |
|
1100 |
0011 |
xxxx |
xxxx |
after RESET goes low. |
||
|
||||||
|
|
|
|
|
|
|
Chip Erase |
1010 |
100x |
xxxx |
xxxx |
Chip Erase EEPROM and |
|
1100 |
xxxx |
xxxx |
xxxx |
Flash. |
||
|
||||||
|
|
|
|
|
|
|
Read Program |
0010 |
0000 |
bbbb |
oooo |
Read H (high or low) data o |
|
H000 |
000a |
bbbb |
oooo |
from Program memory at |
||
Memory |
||||||
|
|
|
|
word address a:b. |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0100 |
000x |
xxxb |
iiii |
Write H (high or low) data i to |
|
|
H000 |
xxxx |
bbbb |
iiii |
Program memory page at |
|
Load Program |
|
|
|
|
word address b. Data low |
|
Memory Page |
|
|
|
|
byte must be loaded before |
|
|
|
|
|
|
Data high byte is applied |
|
|
|
|
|
|
within the same address. |
|
|
|
|
|
|
|
|
Write Program |
0100 |
0000 |
bbxx |
xxxx |
Write Program memory Page |
|
Memory Page |
1100 |
000a |
xxxx |
xxxx |
at address a:b. |
|
|
|
|
|
|
|
|
Read EEPROM |
1010 |
000x |
xxbb |
oooo |
Read data o from EEPROM |
|
Memory |
0000 |
xxxx |
bbbb |
oooo |
memory at address b. |
|
|
|
|
|
|
|
|
Write EEPROM |
1100 |
000x |
xxbb |
iiii |
Write data i to EEPROM |
|
Memory |
0000 |
xxxx |
bbbb |
iiii |
memory at address b. |
|
|
|
|
|
|
|
|
Load EEPROM |
1100 |
0000 |
0000 |
iiii |
Load data i to EEPROM |
|
0001 |
0000 |
00bb |
iiii |
memory page buffer. After |
||
Memory Page (page |
||||||
|
|
|
|
data is loaded, program |
||
access) |
|
|
|
|
||
|
|
|
|
EEPROM page. |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
Write EEPROM |
1100 |
00xx |
xxbb |
xxxx |
Write EEPROM page at |
|
Memory Page (page |
0010 |
xxxx |
bb00 |
xxxx |
||
address b. |
||||||
access) |
|
|
|
|
||
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0101 |
0000 |
xxxx |
xxoo |
Read Lock bits. “0” = |
|
Read Lock bits |
1000 |
0000 |
xxxx |
oooo |
programmed, “1” = |
|
|
|
|
|
unprogrammed. See Table |
||
|
|
|
|
|
||
|
|
|
|
|
22-1 on page 140 for details. |
|
|
|
|
|
|
|
|
|
1010 |
111x |
xxxx |
11ii |
Write Lock bits. Set bits = “0” |
|
Write Lock bits |
1100 |
xxxx |
xxxx |
iiii |
to program Lock bits. See |
|
|
|
|
|
Table 22-1 on page 140 for |
||
|
|
|
|
|
||
|
|
|
|
|
details. |
|
|
|
|
|
|
|
|
Read Signature Byte |
0011 |
000x |
xxxx |
oooo |
Read Signature Byte o at |
|
0000 |
xxxx |
xxbb |
oooo |
address b. |
||
|
||||||
|
|
|
|
|
|
|
|
1010 |
1010 |
xxxx |
iiii |
Set bits = “0” to program, “1” |
|
Write Fuse bits |
1100 |
0000 |
xxxx |
iiii |
to unprogram. See Table 22- |
|
|
|
|
|
|
5 on page 141 for details. |
|
|
|
|
|
|
|
|
|
1010 |
1010 |
xxxx |
iiii |
Set bits = “0” to program, “1” |
|
Write Fuse High bits |
1100 |
1000 |
xxxx |
iiii |
to unprogram. See Table 22- |
|
|
|
|
|
|
4 on page 141 for details. |
|
|
|
|
|
|
|
|
Write Extended Fuse |
1010 |
1010 |
xxxx |
xxxx |
Set bits = “0” to program, “1” |
|
1100 |
0100 |
xxxx |
xxxi |
to unprogram. See Table 22- |
||
Bits |
||||||
|
|
|
|
3 on page 140 for details. |
||
|
|
|
|
|
||
|
|
|
|
|
|
|
146 ATtiny25/45/85 Auto 
7598C–AVR–09/06