

Table 95. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Parallel Programming Characteristics, VCC = 5V ± 10% |
(Continued) |
|
|||||||||||
Symbol |
|
Parameter |
Min |
|
Typ |
Max |
Units |
||||||
|
|
|
|
|
|
|
|
|
|||||
tBVDV |
|
|
BS1 Valid to DATA valid |
0 |
|
|
250 |
ns |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tOLDV |
|
|
OE Low to DATA Valid |
|
|
|
250 |
ns |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
tOHDZ |
|
|
OE High to DATA Tri-stated |
|
|
|
250 |
ns |
|||||
Notes: 1. tWLRH is valid for the Write Flash, Write EEPROM, Write Fuse Bits and Write Lock
Bits commands.
2.tWLRH_CE is valid for the Chip Erase command.
Serial Downloading |
Both the Flash and EEPROM memory arrays can be programmed using the serial SPI |
|||||||||||||||||||
|
bus while RESET is pulled to GND. The serial interface consists of pins SCK, MOSI |
|||||||||||||||||||
|
(input) and MISO (output). After RESET is set low, the Programming Enable instruction |
|||||||||||||||||||
|
needs to be executed first before program/erase operations can be executed. NOTE, in |
|||||||||||||||||||
|
Table 96 on page 232, the pin mapping for SPI programming is listed. Not all parts use |
|||||||||||||||||||
|
the SPI pins dedicated for the internal SPI interface. |
|||||||||||||||||||
Serial Programming Pin |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mapping |
Table 96. Pin Mapping Serial Programming |
|
|
|
||||||||||||||||
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Symbol |
|
|
Pins |
|
|
|
I/O |
|
|
Description |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MOSI |
|
|
PB3 |
|
|
|
I |
|
|
Serial data in |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MISO |
|
|
PB4 |
|
|
|
O |
|
|
Serial data out |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
SCK |
|
|
PB5 |
|
|
|
I |
|
|
Serial clock |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
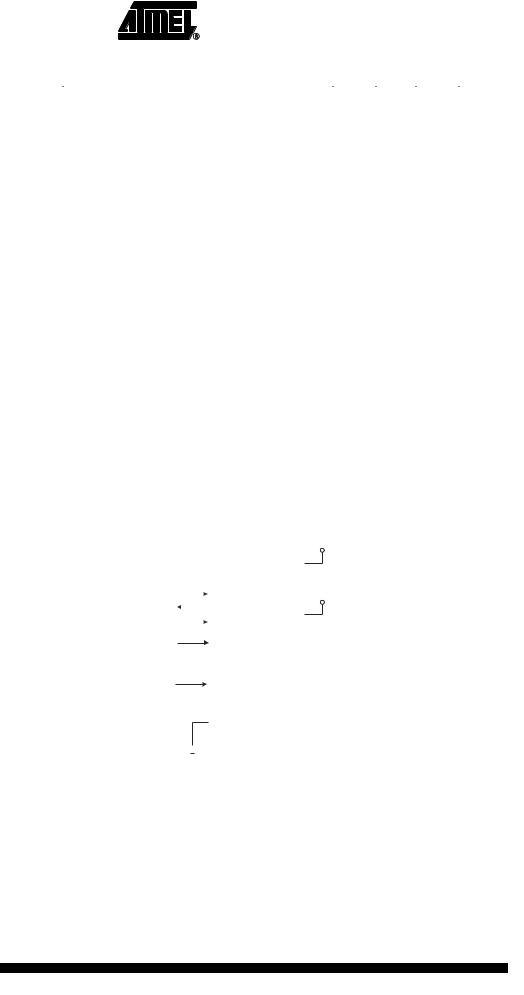
Figure 112. Serial Programming and Verify(1) |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
+2.7 - 5.5V |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
VCC |
|
|
|
|
|
MOSI |
|
|
|
|
|
|
|
|
PB3 |
|
|
+2.7 - 5.5V (2) |
|||||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
MISO |
|
|
|
PB4 |
AVCC |
|
|||||||||||
|
|
|
|
|
||||||||||||||||
|
|
|
|
SCK |
|
|
|
|
|
|
|
|
PB5 |
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
XTAL1 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
RESET |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GND |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Notes: 1. If the device is clocked by the Internal Oscillator, it is no need to connect a clock source to the XTAL1 pin.
2. VCC - 0.3 < AVCC < VCC + 0.3, however, AVCC should always be within 2.7 - 5.5V.
When programming the EEPROM, an auto-erase cycle is built into the self-timed programming operation (in the Serial mode ONLY) and there is no need to first execute the Chip Erase instruction. The Chip Erase operation turns the content of every memory location in both the Program and EEPROM arrays into 0xFF.
Depending on CKSEL Fuses, a valid clock must be present. The minimum low and high periods for the Serial Clock (SCK) input are defined as follows:
232 ATmega8(L)
2486M–AVR–12/03
 ATmega8(L)
ATmega8(L)
Data Polling Flash |
|
|
|
|
|
|
|
|
|
|
|
|
|
When a page is being programmed into the Flash, reading an address location within |
||||||
|
the page being programmed will give the value 0xFF. At the time the device is ready for |
|||||
|
a new page, the programmed value will read correctly. This is used to determine when |
|||||
|
the next page can be written. Note that the entire page is written simultaneously and any |
|||||
|
address within the page can be used for polling. Data polling of the Flash will not work |
|||||
|
for the value 0xFF, so when programming this value, the user will have to wait for at |
|||||
|
least tWD_FLASH before programming the next page. As a chip-erased device contains |
|||||
|
0xFF in all locations, programming of addresses that are meant to contain 0xFF, can be |
|||||
|
skipped. See Table 97 for tWD_FLASH value. |
|||||
Data Polling EEPROM |
When a new byte has been written and is being programmed into EEPROM, reading the |
|||||
|
address location being programmed will give the value 0xFF. At the time the device is |
|||||
|
ready for a new byte, the programmed value will read correctly. This is used to deter- |
|||||
|
mine when the next byte can be written. This will not work for the value 0xFF, but the |
|||||
|
user should have the following in mind: As a chip-erased device contains 0xFF in all |
|||||
|
locations, programming of addresses that are meant to contain 0xFF, can be skipped. |
|||||
|
This does not apply if the EEPROM is Re-programmed without chip-erasing the device. |
|||||
|
In this case, data polling cannot be used for the value 0xFF, and the user will have to |
|||||
|
wait at least tWD_EEPROM before programming the next byte. See Table 97 for tWD_EEPROM |
|||||
|
value. |
|
|
|
|
|
|
Table 97. Minimum Wait Delay Before Writing the Next Flash or EEPROM Location |
|||||
|
|
|
|
|
|
|
|
Symbol |
|
|
|
Minimum Wait Delay |
|
|
|
|
|
|
|
|
|
tWD_FUSE |
|
|
|
4.5 ms |
|
|
tWD_FLASH |
|
|
|
4.5 ms |
|
|
tWD_EEPROM |
|
|
|
9.0 ms |
|
|
tWD_ERASE |
|
|
|
9.0 ms |
|
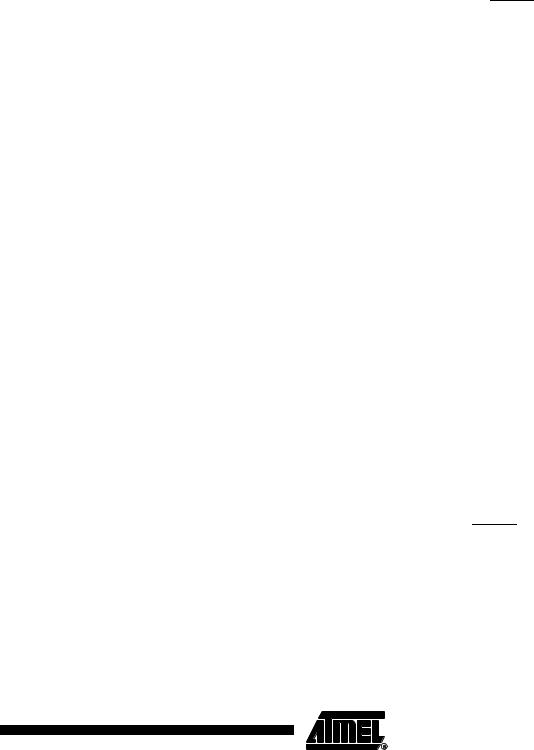
Figure 113. Serial Programming Waveforms
SERIAL DATA INPUT |
MSB |
LSB |
(MOSI) |
|
|
SERIAL DATA OUTPUT |
MSB |
LSB |
(MISO) |
|
|
SERIAL CLOCK INPUT |
|
|
(SCK) |
|
|
SAMPLE |
|
|
234 ATmega8(L)
2486M–AVR–12/03

|
|
|
|
|
|
|
|
ATmega8(L) |
|
|
|
|
|
|
|
|
|
|
Table 98. Serial Programming Instruction Set |
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Instruction Format |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Instruction |
|
Byte 1 |
Byte 2 |
Byte 3 |
Byte4 |
Operation |
|
|
|
|
|
|
|
|
|
|
|
Programming Enable |
|
1010 1100 |
0101 0011 |
xxxx xxxx |
xxxx xxxx |
Enable Serial Programming after |
|
|
|
|
|
|
|
|
RESET goes low. |
|
|
|
|
|
|
|
|
|
|
|
Chip Erase |
|
1010 1100 |
100x xxxx |
xxxx xxxx |
xxxx xxxx |
Chip Erase EEPROM and Flash. |
|
|
|
|
|
|
|
|
|
|
|
Read Program Memory |
|
0010 H000 |
0000 aaaa |
bbbb bbbb |
oooo oooo |
Read H (high or low) data o from |
|
|
|
|
|
|
|
|
Program memory at word address |
|
|
|
|
|
|
|
|
a:b. |
|
|
|
|
|
|
|
|
|
|
|
Load Program Memory |
|
0100 H000 |
0000 xxxx |
xxxb bbbb |
iiii iiii |
Write H (high or low) data i to |
|
|
Page |
|
|
|
|
|
Program memory page at word |
|
|
|
|
|
|
|
|
address b. Data Low byte must be |
|
|
|
|
|
|
|
|
loaded before Data High byte is |
|
|
|
|
|
|
|
|
applied within the same address. |
|
|
|
|
|
|
|
|
|
|
|
Write Program Memory |
|
0100 1100 |
0000 aaaa |
bbbx xxxx |
xxxx xxxx |
Write Program memory Page at |
|
|
Page |
|
|
|
|
|
address a:b. |
|
|
|
|
|
|
|
|
|
|
|
Read EEPROM Memory |
|
1010 0000 |
00xx xxxa |
bbbb bbbb |
oooo oooo |
Read data o from EEPROM |
|
|
|
|
|
|
|
|
memory at address a:b. |
|
|
|
|
|
|
|
|
|
|
|
Write EEPROM Memory |
|
1100 0000 |
00xx xxxa |
bbbb bbbb |
iiii iiii |
Write data i to EEPROM memory at |
|
|
|
|
|
|
|
|
address a:b. |
|
|
|
|
|
|
|
|
|
|
|
Read Lock Bits |
|
0101 1000 |
0000 0000 |
xxxx xxxx |
xxoo oooo |
Read Lock Bits. “0” = programmed, |
|
|
|
|
|
|
|
|
“1” = unprogrammed. See Table |
|
|
|
|
|
|
|
|
85 on page 219 for details. |
|
|
|
|
|
|
|
|
|
|
|
Write Lock Bits |
|
1010 1100 |
111x xxxx |
xxxx xxxx |
11ii iiii |
Write Lock Bits. Set bits = “0” to |
|
|
|
|
|
|
|
|
program Lock Bits. See Table 85 |
|
|
|
|
|
|
|
|
on page 219 for details. |
|
|
|
|
|
|
|
|
|
|
|
Read Signature Byte |
|
0011 0000 |
00xx xxxx |
xxxx xxbb |
oooo oooo |
Read Signature Byte o at address |
|
|
|
|
|
|
|
|
b. |
|
|
|
|
|
|
|
|
|
|
|
Write Fuse Bits |
|
1010 1100 |
1010 0000 |
xxxx xxxx |
iiii iiii |
Set bits = “0” to program, “1” to |
|
|
|
|
|
|
|
|
unprogram. See Table 88 on |
|
|
|
|
|
|
|
|
page 221 for details. |
|
|
|
|
|
|
|
|
|
|
|
Write Fuse High Bits |
|
1010 1100 |
1010 1000 |
xxxx xxxx |
iiii iiii |
Set bits = “0” to program, “1” to |
|
|
|
|
|
|
|
|
unprogram. See Table 87 on |
|
|
|
|
|
|
|
|
page 220 for details. |
|
|
|
|
|
|
|
|
|
|
|
Read Fuse Bits |
|
0101 0000 |
0000 0000 |
xxxx xxxx |
oooo oooo |
Read Fuse Bits. “0” = programmed, |
|
|
|
|
|
|
|
|
“1” = unprogrammed. See Table |
|
|
|
|
|
|
|
|
88 on page 221 for details. |
|
|
|
|
|
|
|
|
|
|
|
Read Fuse High Bits |
|
0101 1000 |
0000 1000 |
xxxx xxxx |
oooo oooo |
Read Fuse high bits. “0” = pro- |
|
|
|
|
|
|
|
|
grammed, “1” = unprogrammed. |
|
|
|
|
|
|
|
|
See Table 87 on page 220 for |
|
|
|
|
|
|
|
|
details. |
|
|
|
|
|
|
|
|
|
|
|
Read Calibration Byte |
|
0011 1000 |
00xx xxxx |
0000 00bb |
oooo oooo |
Read Calibration Byte |
|
|
|
|
|
|
|
|
|
|
|
Note: a = address high bits |
|
|
|
|
|
|
|
|
b = address low bits |
|
|
|
|
|
|
|
H = 0 – Low byte, 1 – High byte o = data out
i = data in
x = don’t care
235
2486M–AVR–12/03

SPI Serial Programming |
|
|
|
|
|
|
|
|
|
|
|
For characteristics of the SPI module, see “SPI Timing Characteristics” on page 241. |
|||||
Characteristics |
|
|
|
|
|
236 ATmega8(L)
2486M–AVR–12/03