

§ 1.3. Типы интегрирующих и дифференцирующих звеньев и их характеристики
Определение понятия интегрирующих и дифференцирующих звеньев было дано в общем виде в предыдущем параграфе. Здесь рассмотрим основные их типы.
Идеальное интегрирующее звено. Уравнение и передаточная функция звена имеют вид
![]()
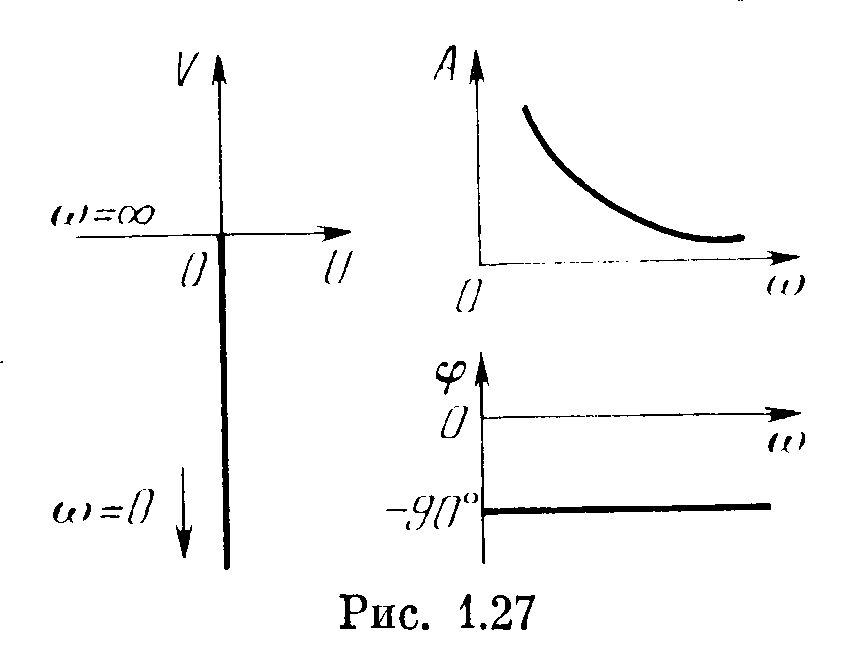
Амплитудно-фазовая частотная характеристика звена (рис. 1.27):
![]()
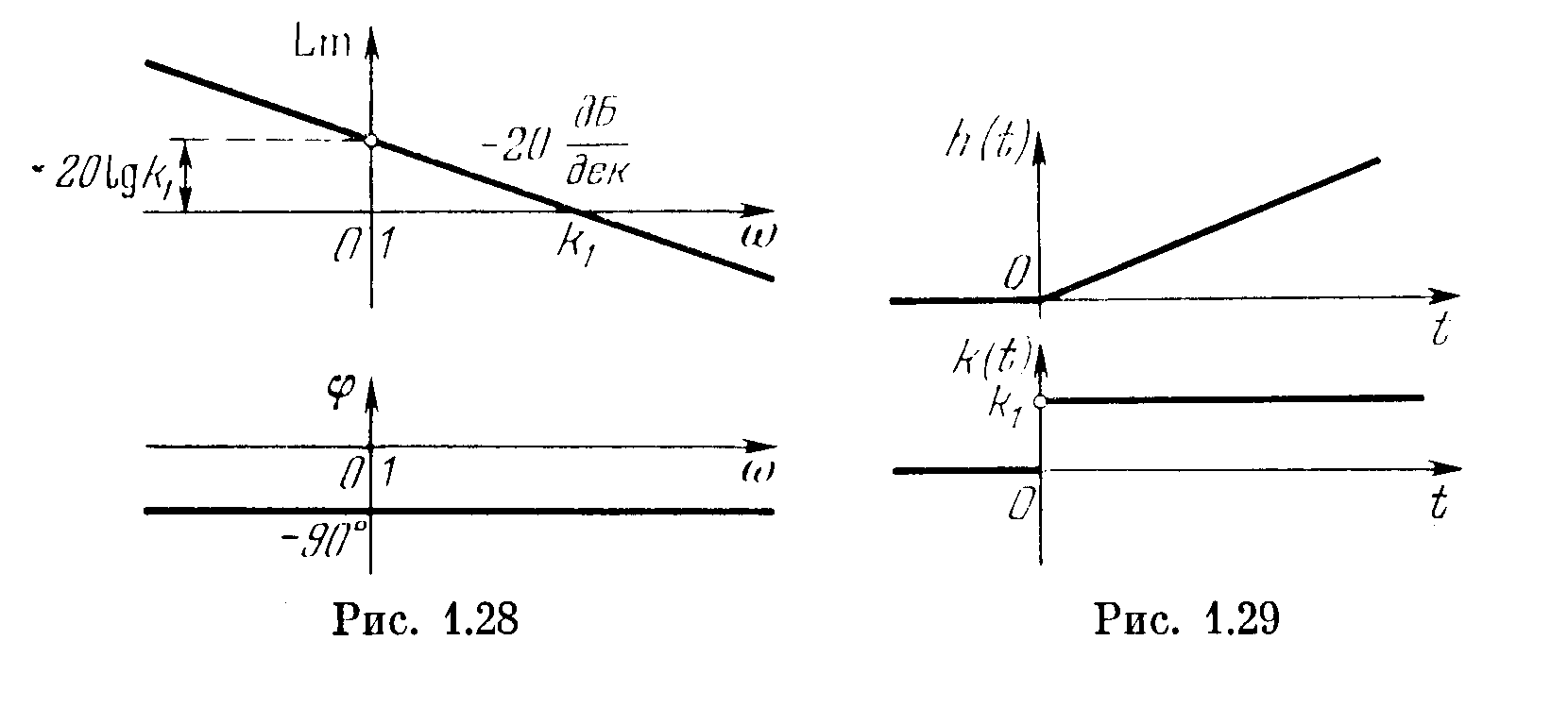
Логарифмическая амплитудная частотная характеристика
![]()
Поскольку на оси абсцисс откладываются значения lg ω, то мы имеем здесь уравнение прямой, проходящей через точку 20 lg k1 при ω = 1 с наклоном —20 дБ/дек. Это и показано на рис. 1.28 вместе с фазовой частотной характеристикой.
Переходная и весовая функция (рис. 1.29) имеют вид
![]()
Примеры идеальных интегрирующих звеньев изображены на рис. 1.30.
Инерционное интегрирующее звено. Уравнение и передаточная функция звена
![]()
Амплптудно-фазовая частотная характеристика:

Вещественная и мнимая части амплитудно-фазовой характеристики имеют вид
![]()
Отсюда видно, что при ω → 0 имеем U→ - k1T1 , V → ∞, что и отражено на рис. 1.31.

Логарифмическая амплитудная частотная характеристика
![]()
Здесь к прежней прямой добавляется наклон —20 дБ/дек,

начиная
с частоты
![]() ,
что показано на рис. 1.32.
,
что показано на рис. 1.32.
Там же изображена и логарифмическая фазовая частотная характеристика.
Переходная и весовая функции, как решения уравнения звена соответственно при x1=1(t) и x1=δ(t), изображенные на рис. 1.33, имеют вид

Следовательно, за счет постоянной времени Т1, вместо идеального интегрирования (рис. 1.29), здесь получается интегрирование с инерционным запаздыванием (рис. 1.33).

Примером такого инерционного интегрирующего звена является электродвигатель, если выходной величиной считать угол поворота вала двигателя.
Идеальное дифференцирующее звено. Уравнение и передаточная функция звена:
![]()
Амплитудно-фазовая частотная характеристика (рис. 1.34) звена:
![]()
В реальных системах такой вид характеристики звена возможен лишь в ограниченной полосе частот, так как неограниченное увеличение амплитуды с ростом частоты требует бесконечной энергии.
Логарифмические частотные характеристики (рис. 1.35):
![]()
В отличие от интегрирующего звена, здесь имеют место положительный наклон +20 дБ/дек и положительная фаза. Наличие положительной фазы означает опережение сигнала на выходе звена по отношению к входу. Физически это связано с тем, что, как видно из уравнения,

звено реагирует на скорость изменения входной величины, т. е. не на саму величину x1, а на тенденцию изменения ее в будущем. Как говорят, звено обладает предсказанием.
Переходная и весовая функции имеют вид
![]()
Примерами такого типа звена являются (рис. 1.36) тахогенератор и RС-цепочка с усилителем.

Идеальное звено с введением производной. Уравнение и передаточная функция звена:
![]()
Амплитудно-фазовая частотная характеристика (рис. 1.37):
![]()
Это возможно так же, как и в предыдущем случае, лишь в ограниченной полосе частот. Логарифмические частотные характеристики (рис. 1.38) звена:
![]()
Переходная и весовая функции имеют вид
![]()
Инерционное дифференцирующее звено. Уравнение и передаточная функция звена:
![]()
Амплитудно-фазовая частотная характеристика (рис. 1.39) звена:
![]()
Логарифмические частотные характеристики (рис. 1.40):

Переходная и весовая функции (рис. 1.41) имеют вид
![]()
Примерами такого типа звена являются (рис. 1.42) обычная цепочка RC, трансформатор, механический демпфер с пружиной. Здесь мы видим реальное ограничение амплитуды при увеличении частоты (рис. 1.40). Аналогично и для инерционного звена с введением производной реальное ограничение определяется передаточной функцией
![]()

за счет постоянной времени Т2 .


